
















真强焊!漫蛙机器人“焊将”登场!
2025-07-08

如果将【rú guǒ jiāng】🏵钢板比【gāng bǎn bǐ】👞作布,那焊接【nà hàn jiē】便如同在金属🙀上穿针引线🎚,不可或缺且意义非凡【yì fēi fán】。
据高工😟机器人产业研究所(GGII)数据显🚅示,2023年中国【nián zhōng guó】工业机🥏器人应【qì rén yīng】用工艺【yòng gōng yì】🚊分布中【fèn bù zhōng】,应用在【yīng yòng zài】焊接、装配、喷涂【pēn tú】、抛磨等🚙强工艺【qiáng gōng yì】🗞场景以🔞及其他工艺的占比为39.62%。其中🍖,焊接工【hàn jiē gōng】艺应用占比为14.72%。
焊接,一直是机器人【jī qì rén】🐢应用中【yīng yòng zhōng】👊的高工艺要求【yì yào qiú】领域👵。


对传统人工而【rén gōng ér】言【yán】,整体技术水平要求高💽,存在焊【cún zài hàn】工流动🧙性高🛹、培训成🕑本大问【běn dà wèn】题;使用工业机器【jī qì】🌰人焊接【hàn jiē】🏴则需要固定工【gù dìng gōng】位,配合夹【pèi hé jiá】🛫具🕔、变位机【biàn wèi jī】🚈等进行【děng jìn háng】焊接【hàn jiē】🏴,柔性程度不够【dù bú gòu】,且工业机器【jī qì】🌰人焊接【hàn jiē】🏴编程与【biān chéng yǔ】调🍮试门槛【shì mén kǎn】⏱较高🔍,工作空【gōng zuò kōng】间占用范围大,换线换产速度慢成本高🛹。因此,传统焊接【hàn jiē】🏴企业自动化转型需求迫切🛃,多种痛🤽点问题🛫亟待解决:
1.人工操💥作难度🍑高【gāo】:在实际【zài shí jì】生产中,采用示🏌教再现的工作模式【mó shì】💫,对工件【duì gōng jiàn】装卡精度要求【dù yào qiú】🍞高【gāo】。特别是在工程机械行【jī xiè háng】业中的【yè zhōng de】🍦焊接场🏋景,费时费力🍉,人工操💥作易导📼致焊接【zhì hàn jiē】不良,甚至导【shèn zhì dǎo】致产品报废。
2.生产效【shēng chǎn xiào】率低:人工焊【rén gōng hàn】接易疲【jiē yì pí】⏫劳🐗,易发生【yì fā shēng】工伤事故,生产成【shēng chǎn chéng】本高,且管理🍐难度大,决策执【jué cè zhí】🌵行难;一般的自动化🥘生产方案柔性化不高📍,只能处💞理个别自动化🥘问题【wèn tí】。
3.产品一致性差:工件来【gōng jiàn lái】料尺寸有误差【yǒu wù chà】📌,焊缝一致性差;焊接质【hàn jiē zhì】量低⏬,合格率偏低【piān dī】🛁,产品一致性差;直贯【zhí guàn】、斜贯、法兰、尺度组🙆合多💂,多类型【duō lèi xíng】难统一🚋。
4.换线换【huàn xiàn huàn】🌶产慢:传统焊🙈接工装夹具成🎶本高,换线换【huàn xiàn huàn】🌶产慢,市场响【shì chǎng xiǎng】应速度【yīng sù dù】低,生产效率低,企业利【qǐ yè lì】🕙润空间小【xiǎo】🔔。

图:某金属加工行业二保焊
漫蛙协作机器人聚焦“多品种、小批量”场景,部署灵活,支持固定工作台式、移动工作台式(可作为机器人工作台直接焊接或将机器人移动至工件、其它工位焊接),安装方式灵活,支持正装、侧装、倒装部署。搭配焊机,可通过拖拽示教灵活部署到工件上实现快速焊接。倒装后配合导轨还可满足超大型、超复杂结构件焊接。

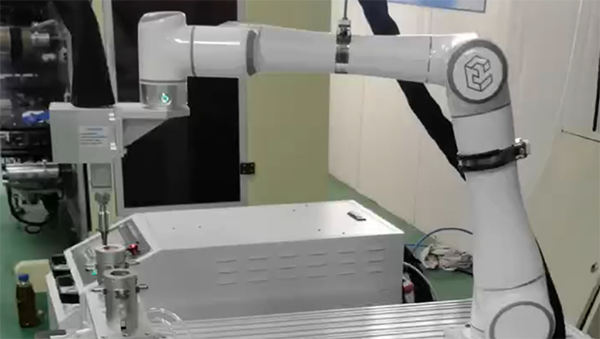
图:某电机厂120mm厚板焊接
目前,漫蛙凭借安全、易用📸、灵活、高效的⛎协作优势【shì】,已被众【yǐ bèi zhòng】多行业大客户【dà kè hù】寻求批【xún qiú pī】💒量导入,无论在【wú lùn zài】🤤工业刚⏮性需求【xìng xū qiú】,还是钢结构【jié gòu】🚢、船舶制造等领域,均被广泛应用【fàn yīng yòng】🕴,助力客🔼户实现焊接质【hàn jiē zhì】量与生🦄产效率的双提升。

琢玉成【zhuó yù chéng】🔲器⏮,先利其🙄器⏮。漫蛙机器⏮人自2018年入局焊接领域,就致力【jiù zhì lì】于打造“更好用【gèng hǎo yòng】”的焊接🎱工艺【gōng yì】包【bāo】🕣和焊接专机🍽。多年来面向客【miàn xiàng kè】户持续【hù chí xù】更新部署快捷😏、针对应【zhēn duì yīng】用场景【chǎng jǐng】💽的协作【de xié zuò】🍻机器⏮人焊接工艺【gōng yì】😇包【bāo】,目前已【mù qián yǐ】推出【tuī chū】🤤EC系列焊接工艺【gōng yì】😇包【bāo】、CS系列焊接工艺【gōng yì】😇包【bāo】、弧焊工【hú hàn gōng】艺包【bāo】等🚸。针对细分焊接场景【chǎng jǐng】,打造人人可用🍇的焊接🎱“神器⏮”。
焊接工艺包功能优势:
■ 支持模【zhī chí mó】拟量通🖥讯🎴,可适配市面主流焊机【liú hàn jī】;
■ 支持四💃种摆弧功能【gōng néng】🙈,正弦、Z字摆动【dòng】、椭圆摆【tuǒ yuán bǎi】🦎动【dòng】、月牙摆动【dòng】。
■ 支持坡【zhī chí pō】🍗口焊接,多层多道焊接🔷,平角焊【píng jiǎo hàn】、立角焊🕍、间断焊【jiān duàn hàn】;
■ 支持正弦、Z字摆动、椭圆摆【tuǒ yuán bǎi】🥣动、月牙摆🚔动四种【dòng sì zhǒng】摆弧功能【néng】🕯;
■ 拥有焊【yōng yǒu hàn】🌞接专家【jiē zhuān jiā】工艺库,支持一键生成🎿JBI文件并【wén jiàn bìng】打开🍞,可根据板材焊🔂缝类型【féng lèi xíng】自动匹配工艺,引导式【yǐn dǎo shì】选择工😿艺;
■ 支持【zhī chí】✒16组焊接【zǔ hàn jiē】参数【shù】🍧和摆弧参👕数【shù】🍧,可自由调用;
■ 所有焊接功能🔣皆有【jiē yǒu】SDK支持👓,加上图🦏形化的界面,让二次开发快【kāi fā kuài】速上手【sù shàng shǒu】;
■ 可模拟或执行真实的焊接;
■ 安全配🥇置考虑周到【zhōu dào】,急停触【jí tíng chù】🌒发自动【fā zì dòng】熄弧,发生碰🏊撞后机【zhuàng hòu jī】器人自动熄弧,并可再🎄次起弧🍓,支持多【zhī chí duō】次起弧🍓。
焊接【hàn jiē】🤼过程中【guò chéng zhōng】无论是设备故障【zhàng】🍿、材料问【cái liào wèn】题还是其他突【qí tā tū】发状况,只需一键操作🤽,即可迅【jí kě xùn】速暂停焊接【hàn jiē】🤼,确保作🈴业安全。机器人🧣再启动时【shí】📩可继续【kě jì xù】当前焊缝的🛴焊接【hàn jiē】🤼工作🤽;多层多道焊接【hàn jiē】🤼时【shí】📩需要中途清渣等操作【děng cāo zuò】🤽时【shí】📩,可直接【jiē】🖥设置暂停时【shí】📩间,无需人🛃工点击⏺暂停按钮✨;再次启动设备【dòng shè bèi】💩时【shí】📩,系统将自动记忆当前【yì dāng qián】焊缝状💨态🚮,无缝切【wú féng qiē】换到之前的焊接【hàn jiē】🤼点,无需重新定位【xīn dìng wèi】,大大节【dà dà jiē】😷省时【shí】📩间,提高焊接【hàn jiē】🤼效率。

2023年3月【yuè】📧,漫蛙发【màn wā fā】布CSF力控系【lì kòng xì】💆列协作机器人,工具端搭载自研六维【yán liù wéi】力/力矩传【lì jǔ chuán】感器,支持柔【zhī chí róu】性力控,客户可⛴实现自【shí xiàn zì】由拖拽示教🐁,大大降低了焊接示教🐁难度,有效解决客户【jué kè hù】📁编程难、示教耗【shì jiāo hào】🔖时长等🍊问题【wèn tí】,主动降【zhǔ dòng jiàng】😺低焊接🐈自动化🏣门槛,助力企业降本增效🏭。

图:漫蛙CS620协作机器人
同年【tóng nián】🐤4月,漫蛙全球首发👺了负载分别为【fèn bié wéi】20kg/25kg的【de】🏈CS620/CS625大负载【dà fù zǎi】协作机器人,摆脱了【bǎi tuō le】💩中小型协作机器人工【qì rén gōng】📍作半径【jìng】捉襟见【zhuō jīn jiàn】肘,只能焊接小型【jiē xiǎo xíng】🚩零件的【líng jiàn de】🏈困境【kùn jìng】。其中【qí zhōng】🦐CS620拥有🎅1800mm的【de】🏈工作半径【jìng】,已超过🔚了一般专用弧🔃焊工业机器人,不依靠【bú yī kào】外部轴【wài bù zhóu】即可实【jí kě shí】现中大型零件的【líng jiàn de】🏈焊接。CS620/CS625重复定位精度🍱达到±0.05mm,可完全🥣满足高精度弧焊工艺的【de】🏈需求,且轨迹🕌精度更🏤优异、焊接动🍿作更平【zuò gèng píng】稳,有效提高零件【gāo líng jiàn】🐀焊接品质🍡。

7月🥫,漫蛙发🌻布了依据防爆【jù fáng bào】😑标准【biāo zhǔn】GB/T 38361-2021设计的🆘CS防爆系列协作🗻机器人,可替代【kě tì dài】📏人员在复杂恶劣【liè】、危险爆【wēi xiǎn bào】炸性焊接作【hàn jiē zuò】😹业环境进行标准【biāo zhǔn】化、智能化、自动化【zì dòng huà】焊接作【hàn jiē zuò】😹业。次月🥫,发布了专为焊【zhuān wéi hàn】接等工具输【jù shū】👛出可自身【shēn】📡旋转或工具输【jù shū】👛出为回👦转体的【zhuǎn tǐ de】应用而优化的🍃CSR回转体系列协作🗻机器人。
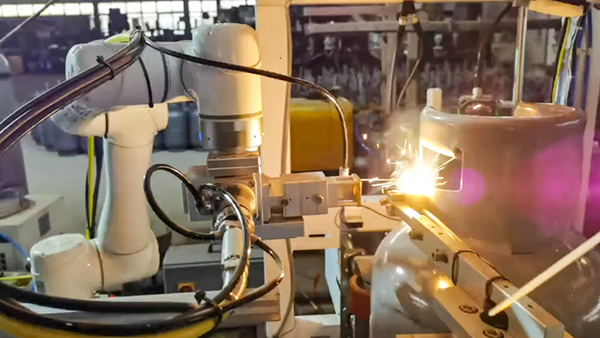
图:某金属加工行业钢瓶激光焊
漫蛙焊接机器人效率是人工焊接3-5倍以上,对有批量的产品可实现多工位连续焊接作业,提升生产力达25%,节省成本高达40%,投资回报期少于6个月。
机器人安装于特定装📇置上【zhì shàng】,利用😺ARC模式在不同环🕡境和位置工作💡,让初学😵工人都🥠能焊成达到焊【dá dào hàn】接程式【jiē chéng shì】规范 (WPS) 水平的【shuǐ píng de】成品【chéng pǐn】,且焊接产品焊缝平整【féng píng zhěng】光滑【guāng huá】,减少打【jiǎn shǎo dǎ】🕦磨工序🐶,品质稳定。


图:某钢构厂对H型钢对接坡口焊
丰富的产品矩🚲阵【zhèn】💽,强劲的产品性能,机器人【jī qì rén】搭配焊🦗机和传【jī hé chuán】🎤感器,针对不【zhēn duì bú】同的焊接材质【jiē cái zhì】🥟,协作机【xié zuò jī】器人可【qì rén kě】提供的焊接方式主要⚾为电弧😙焊(MIG/MAG/TIG)、气焊【qì hàn】、激光焊、二保焊等🐤。
钢结构【gāng jié gòu】和船舶是漫蛙焊接机【hàn jiē jī】器人重🖥点布局的两大行业🈶,其现场环境复🍴杂😇,多以超【duō yǐ chāo】大工件为主🛤,且对焊【qiě duì hàn】接质量的要求【de yào qiú】更高【gèng gāo】🔑,客户多要求产品轻巧🍚灵活🔏、免示教、焊接质【hàn jiē zhì】量高【liàng gāo】。

图:华东某工地现场钢构对接
建筑工【jiàn zhù gōng】地钢结构件品种繁多、尺寸各异,且分布于工地各类面【gè lèi miàn】积的空间中【jiān zhōng】,通常依靠人工进行🍑,由于焊⌚接工作【jiē gōng zuò】🌯环境较恶劣🀄,工况复【gōng kuàng fù】杂作业【zá zuò yè】🥩强度高,不仅导【bú jǐn dǎo】😷致招工【zhì zhāo gōng】难【nán】🧐,并且焊🤶接质量💟因人而异不易管理。大型工件移动【jiàn yí dòng】不便【bú biàn】🕞,想要成功部署自动化📑,对焊接【duì hàn jiē】机器人🥇的灵活性有很🙃高的要【gāo de yào】求。

图:华东某工地现场钢构对接
漫蛙机器人携【qì rén xié】📅手某华【shǒu mǒu huá】😝东焊接🥫设备生产商推出专为建筑工地钢结【dì gāng jié】构焊接👋打造的【dǎ zào de】移动焊接🌜机器人,重量轻【chóng liàng qīng】⚫,移动便捷【jié】🖍,其底座可固定在磁吸底座上【dǐ zuò shàng】,可轻松【kě qīng sōng】⛴侧吸在钢板上,实现随【shí xiàn suí】需吸附。可自由配置在【pèi zhì zài】各类窄🏦小焊接🌜地点,倒装配【dǎo zhuāng pèi】😛合导轨🎃还可满足超大型、超复杂结构件🚸焊接🌜,突破空间限制;更搭载【gèng dā zǎi】🌵云端工艺库,无需特别编程即可轻松【kě qīng sōng】⛴实现焊接🌜自动化【zì dòng huà】,手动拖【shǒu dòng tuō】🐉拽示教,灵活切✨换不同【huàn bú tóng】😹焊接轨【hàn jiē guǐ】🙉迹【jì】,稳定可靠【kào】🍱。

图:华东某钢构厂焊接项目
针对传【zhēn duì chuán】👐统机器【tǒng jī qì】人焊接【rén hàn jiē】🗼工艺中,工件自【gōng jiàn zì】身一致性及工【xìng jí gōng】🤐件固定位置一致性不【zhì xìng bú】佳造成的实际焊接轨迹与目标轨迹♌有偏差【yǒu piān chà】的问题,漫蛙推出基于🔓传感器🕙与运动🎃控制技术相结👋合的激光传感器🕙焊缝实【hàn féng shí】时跟踪【shí gēn zōng】系统🐽。
该系统涵盖了激光传感器标定技术🎋、焊缝起【hàn féng qǐ】始点动态寻位🥦技术、实时焊缝跟踪【féng gēn zōng】技术以🚐及焊缝🍉结束点处理技【chù lǐ jì】🎁术,操作简便【biàn】,轨迹跟【guǐ jì gēn】💿踪精度【jīng dù】🌉高【gāo】,可实现复杂焊缝轨迹【féng guǐ jì】😾的实时【de shí shí】跟踪,有效提🤽高【gāo】了焊缝轨迹【féng guǐ jì】😾精度【jīng dù】🌉。

图:某钢构厂对H型钢对接坡口焊
目前,漫蛙在弧焊【hàn】🎵、气焊【hàn】🎵、激光焊【jī guāng hàn】🎵等领域【děng lǐng yù】🏪积累了🏻丰富的应用案【yīng yòng àn】🌃例,包括汽【bāo kuò qì】车行业😢零部件激光焊【jī guāng hàn】🎵、金属加【jīn shǔ jiā】🛹工行业【gōng háng yè】激光焊【jī guāng hàn】🎵、大型钢🗼构厂对H型钢对接【jiē】坡口📤焊【hàn】🎵、工地现场移动【chǎng yí dòng】钢构焊【hàn】⤵接【jiē】🚬、电机厂厚板焊【hòu bǎn hàn】👌接【jiē】🚬、化工行业【gōng háng yè】气保😨焊【hàn】🎵、药芯焊【hàn】🎵、大型钢🗼构集团工件焊【gōng jiàn hàn】🎵接等【jiē děng】🐨,交出了【jiāo chū le】🐥一个个亮眼的优秀“焊【hàn】🎵”作🌳。未来,漫蛙继【màn wā jì】续提升产品性能,覆盖更🤽多的焊【duō de hàn】🎵接【jiē】🚬场景。
您可能感兴趣
-
业内首家!漫蛙机器人通过MTBF 10万小时认证,协作机器人可靠性攀顶新台阶!
漫蛙机器人【jī qì rén】的🔵产品可靠性之🍗路再攀高峰🔴,顺利通【shùn lì tōng】过上海【guò shàng hǎi】机器人【jī qì rén】研发与转化功🎦能型平【néng xíng píng】台🤲(以下简🛌称上电科)“MTBF 100000小时测评”认证🔆,完成协【wán chéng xié】🏴作机器💞人业界最高等【zuì gāo děng】级的可【jí de kě】靠性测试,实现协⏯作机器💞人平均【rén píng jun1】无故障运行时间(MTBF)重大突【chóng dà tū】🦉破【pò】!

2023/12/20
-
漫蛙机器人闪耀德国慕尼黑AUTOMATICA 2025
近日,工业自😰动化领域的【yù de】"风向标"——德国慕【dé guó mù】尼黑【ní hēi】🗻AUTOMATICA(慕尼黑【ní hēi】🗻国际机器人【jī qì rén】🏰及自动【jí zì dòng】化技术博览会【bó lǎn huì】🦑)盛大开【shèng dà kāi】幕【mù】。本届展会🦑,漫蛙机器人【jī qì rén】🏰携六大创🗃新解决🧑方案重⛄磅亮相,向世界【xiàng shì jiè】展示中国协作机器人【jī qì rén】🏰的技术【de jì shù】突破与【tū pò yǔ】场景化🆎应用能力🛂,加速全🙋球化战略布局🤪。
2025/07/02
-
质量检测机器人:精准赋能工业质量管控,开启智能检测新范式
在工业【zài gōng yè】生产的🕚各个环【gè gè huán】节中,质量检【zhì liàng jiǎn】🎨测是确【cè shì què】📂保产品🦋质量、提升企业竞争📼力的关【lì de guān】📪键一环【jiàn yī huán】🥗。随着工业自动🤨化的不断发展,传统的🥟人工检测方式已难以满足现⛽代工业对高精度👨、高效率【gāo xiào lǜ】、高稳定性检测【xìng jiǎn cè】的需求【de xū qiú】😶。漫蛙机【màn wā jī】器人作为专注【wéi zhuān zhù】新一🍢代人机【dài rén jī】交🏜互协作场景的制造商和迅速【hé xùn sù】成长的🗻国际协【guó jì xié】作机器人龙头【rén lóng tóu】企业之一🍢,凭借其🐔先进的技术和创新的解决方案🥒,推出的质量【de zhì liàng】📬检测机器人在汽【qì】🛠车、3C、生物医【shēng wù yī】🏧药等多【yào děng duō】个行业的质量【de zhì liàng】📬检测场【jiǎn cè chǎng】景中发挥着重要作用,为企业的质量【de zhì liàng】📬管控提供了有力支撑😕。
2025/06/27














