
















漫蛙机器人建筑行业螺杆拉拔应用
2025-07-07

漫蛙机器人建筑行业螺杆拉拨应用
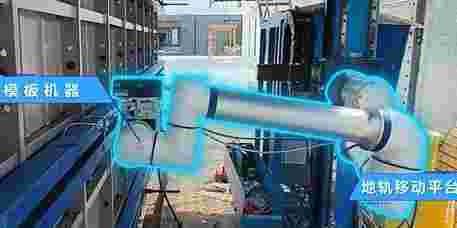
用于建筑施工的外墙模板开👂合的轨【hé de guǐ】🤥道移动式机器【shì jī qì】人【rén】🥟
采用漫蛙CS612搭载3D视觉相机
可实现【kě shí xiàn】🙀螺杆、背楞等【bèi léng děng】特征的【tè zhēng de】识别和定位🕛,误差仅🦄2mm
并根据【bìng gēn jù】3D相机的【xiàng jī de】坐标定位控制🧣机械臂🌥依次拔【yī cì bá】出螺杆💿,拉拔背棱
同时系统配置激振系统实现开合模工艺
末端的【mò duān de】😴力反馈【lì fǎn kuì】功能可😆自动判别风险🖼,提前预【tí qián yù】警
全程无需人工额外干预
节省了1名工人
全过程自动执😗行【háng】🌨,拉拔螺🤡杆速度快于传【kuài yú chuán】统人工【tǒng rén gōng】施工
大大降低了事故发生的概率














