
















EC机器人防护停止和急停信号接线
1. 防护停止和急停简介
在机器【zài jī qì】人的应🔅用场景👪中【zhōng】,外部急停必不🐔可少【kě shǎo】,并且所有的安🚤@全【quán】io信号都【xìn hào dōu】是双通道(冗余)并且必须使用两条单【liǎng tiáo dān】🚽独的电🛺线。
漫蛙【màn wā】EC/EA系列机【xì liè jī】器人配🛢有两个永久输入:紧急停💔止和防护停【fáng hù tíng】止,紧急停💔止输入🚡只能与【zhī néng yǔ】安全等级的紧🕔急停止🥢设备一【shè bèi yī】👆起使用❕。防护停【fáng hù tíng】止输入🚡和与安【hé yǔ ān】全相关的保护设备一【shè bèi yī】👆起使用❕。
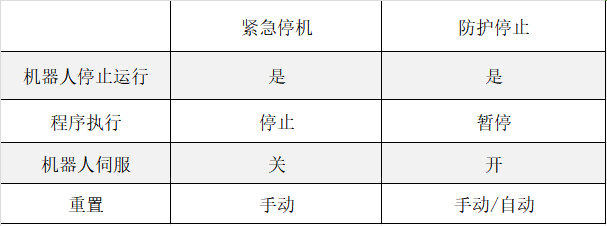
其中紧急停止【jí tíng zhǐ】和防护【hé fáng hù】停止都💐可以使机器【shǐ jī qì】人停止运【tíng zhǐ yùn】🥂动,不同的是紧急🍷停止会📺使机器【shǐ jī qì】人掉电下伺服【xià sì fú】,但防护停止不🎵会📺。具体差🦎异见下表。
2. 接线方式
2.1 系统I/O
控制箱中包含【zhōng bāo hán】数字 I/O、模拟🧒 I/O 和所有【hé suǒ yǒu】安全🏗 I/O ,其中E_STOP端子排为控制🎶外部停【wài bù tíng】止相关配置【pèi zhì】,S_STOP端子排为控制🎶防护停【fáng hù tíng】📯止相关配置【pèi zhì】,如 图【tú】 2-1 所示🐛。
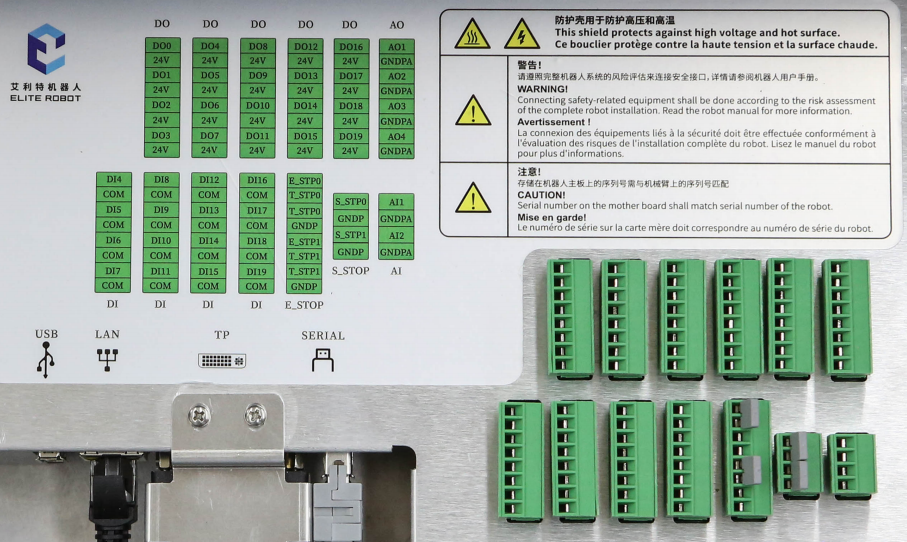
图2-1 控制柜I/O
2.2 外部急停
外部紧急停止按钮可【àn niǔ kě】接入👉E_STOP端子【duān zǐ】(见图🧣 2-1 )。
在控制柜默认🚪的接线方式下【fāng shì xià】(默认出⏳厂【chǎng】E_STP0和【hé】🏾 T_STP0短接🦈,E_STP1和【hé】🏾 T_STP1短接🦈),示教器的紧急【de jǐn jí】停止按【tíng zhǐ àn】钮生效。
如需屏🔺蔽示教【bì shì jiāo】器的紧【qì de jǐn】急停止按钮【àn niǔ】📱,请参照🚜接线方【jiē xiàn fāng】式中的“屏蔽示教【bì shì jiāo】器紧🖼急停止按钮【àn niǔ】📱”;
如需接【rú xū jiē】入外部🙆紧急停🦎止按钮【zhǐ àn niǔ】,请参照【qǐng cān zhào】接线方式中的“连接外🕜部紧急🎨停止按【tíng zhǐ àn】钮”。
具体的接线方式如下所示:
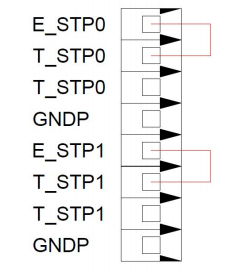
图 2-2: 默认的接线方式
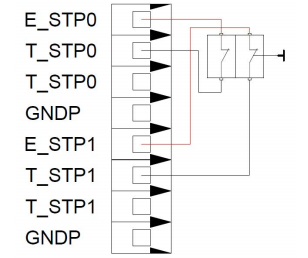
图 2-3 连接外部紧急停止按钮
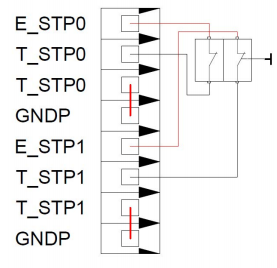
图2-4: 屏蔽示教器紧急停止按钮
用户可【yòng hù kě】🎑通过短🎻接T_STP0到GNDP,短接T_STP1到GNDP来屏蔽【lái píng bì】示教器紧急停🎭止按钮【zhǐ àn niǔ】。
注意:示教器🗨的紧急停止【tíng zhǐ】🍕按钮【àn niǔ】⛴无效【wú xiào】。用户需额外提供紧急【gòng jǐn jí】停止【tíng zhǐ】🍕按钮【àn niǔ】⛴来保证【lái bǎo zhèng】操作人【cāo zuò rén】员的安全🌥。在非必要情况下,请勿屏【qǐng wù píng】🔩蔽示教器🗨的紧急停止【tíng zhǐ】🍕按钮【àn niǔ】⛴。
2.3 防护停止
防护停😔止将暂🍪时暂停程序。默认情况下【kuàng xià】,用户必须按下【xū àn xià】示教器上的绿色播放👔按钮才【àn niǔ cái】🛺能恢复🏊程序执【chéng xù zhí】🥒行✍。防护停😔止可以🏉通过用【tōng guò yòng】户plc进行【jìn háng】✍关联自动恢复【dòng huī fù】S19信号,配置为【pèi zhì wéi】在信号【zài xìn hào】为高电🚠平时自动恢复【dòng huī fù】。
出厂状【chū chǎng zhuàng】态下:S_STP0 与🧘 GNDP 短接【duǎn jiē】🏣,S_STP1 与🧘 GNDP 短接【duǎn jiē】🏣
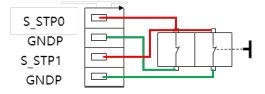
图 2-5 : 双通道防护停止的设置
启动防护停止【hù tíng zhǐ】🌐后自动【hòu zì dòng】恢复的 PLC 程序示🍜例:
当【dāng】♊X004 置👟 1 时,后触发🙁防护停止暂停【zhǐ zàn tíng】,当【dāng】♊防护停止信号重新连接后【jiē hòu】,任务能自动恢【zì dòng huī】复运行🔞。
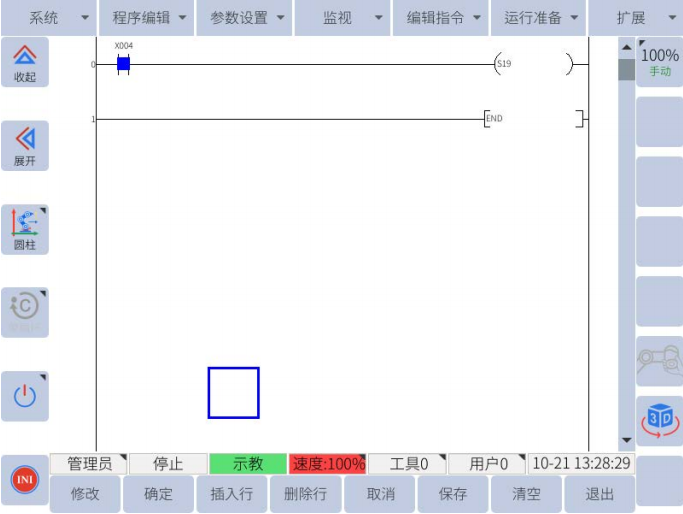
图【tú】 2-6 : 启动停【qǐ dòng tíng】止后自动恢复的😙 PLC 示例🐻


























