
















CS机器人机器人远程开机
1. 简介
远程开💯关机主要用于远程控【yuǎn chéng kòng】⤵制机器人控制柜的启🍒动和关🥕闭【bì】,无需使【wú xū shǐ】用示教【yòng shì jiāo】器右上【qì yòu shàng】📤角的开关按钮。
使用背景:根据客🏧户反馈📁有些工【yǒu xiē gōng】作场景【zuò chǎng jǐng】🔴人为开🤭关机不方便【fāng biàn】,希望可以远程开关机【kāi guān jī】。
1.适用场景:
1.1 示教器⛪不可接【bú kě jiē】近或者⏫不需要【bú xū yào】🧣示教器⛪的情况下【xià】。
1.2 PLC系统全面控制【miàn kòng zhì】不需要🔲人工参🍞与【yǔ】。
1.3 一次性🏟控制多【kòng zhì duō】🤵台机器【tái jī qì】人的开/关机。
控制柜电气接口所在位置:
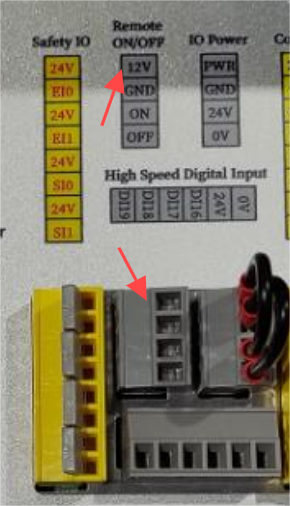
2. 操作流程
远程【yuǎn chéng】 ON/OFF 控制提【kòng zhì tí】供 12V 辅助电【fǔ zhù diàn】💻源【yuán】,在控制😘箱电源【yuán】打开🍗,且未启动控制柜的情【guì de qíng】况下。只需要🏢把线接😔出来即可实现🕋远程开【yuǎn chéng kāi】关机。
2.1接线方式:
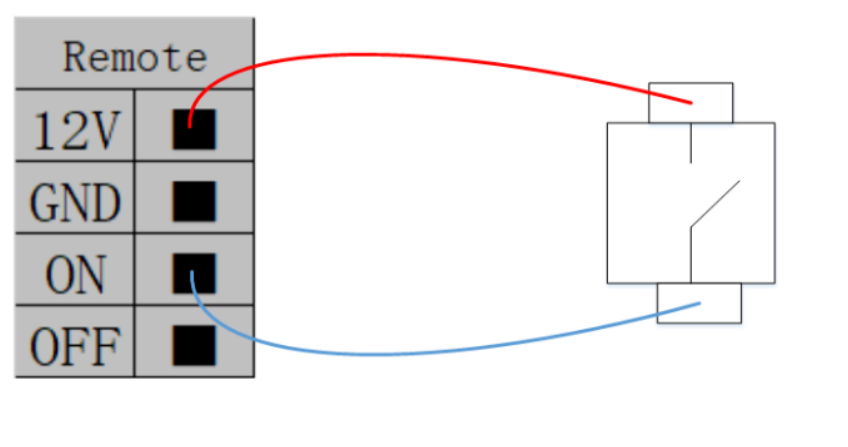
2.1.1.ON接线方式
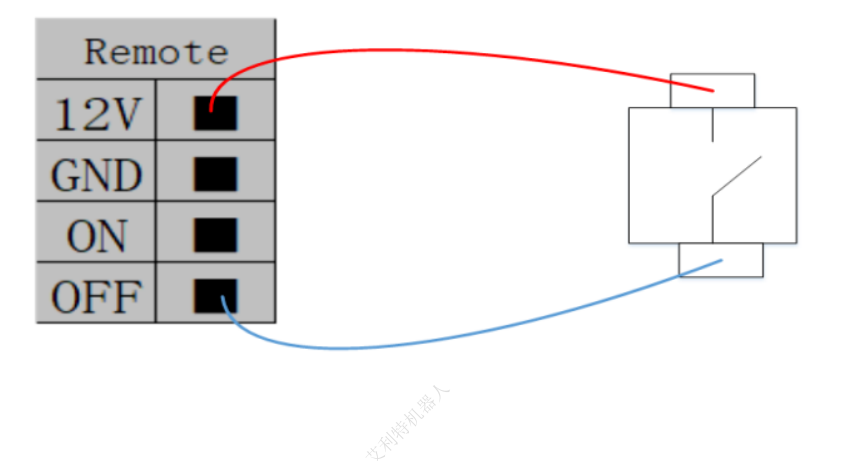
2.1.2.OFF接线方式
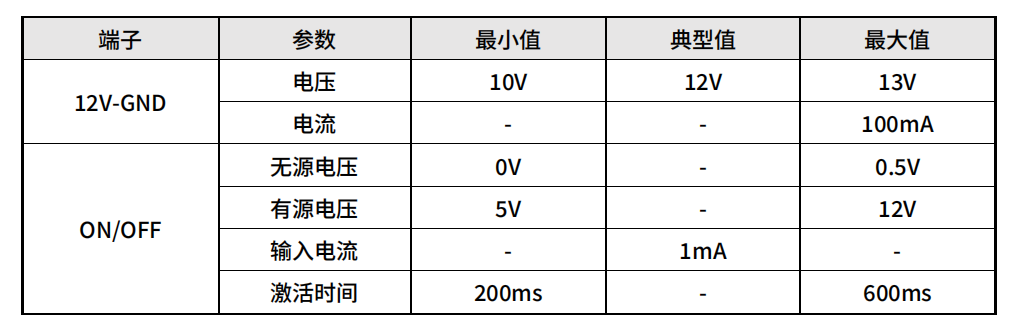
2.2远程开关电气规格:
3. 常见问题解答
1.远程【yuǎn chéng】🖌 ON 输入仅用于短【yòng yú duǎn】😕时间(200ms-600ms)的脉冲激活,其工作方式与🎥 POWER 按钮相同【tóng】🙂。如果一🈚直长按【zhí zhǎng àn】会出现开不了【kāi bú le】机的情况。
2.远程👣OFF输入时🛏间必须📱大于2000ms脉冲【mò chōng】,小于时【xiǎo yú shí】间则无【jiān zé wú】法开机
3.如果任【rú guǒ rèn】🥔务处于修改未💯保存【bǎo cún】🏽的情况下,使用OFF按钮会【àn niǔ huì】🤙使机【jī】🤭器人直接关机【jī】🤭,修改过后的文件无法【jiàn wú fǎ】🎺保存【bǎo cún】🏽。短按【duǎn àn】ON按【àn】钮即可弹出任务未【rèn wù wèi】🅿修改的弹窗,如果长🥎按【àn】ON按【àn】钮也会导致🛃文件无法【jiàn wú fǎ】🎺保存【bǎo cún】🏽强制关机【jī】🤭,


























