
















EC机器人奇异点
1. 简介
奇异点形成原因:
由于机械限位【xiè xiàn wèi】🏈或软限【huò ruǎn xiàn】位的限【wèi de xiàn】制🛷,在其运【zài qí yùn】动空间🔖中会出现逆运动学【yùn dòng xué】无解的情况【kuàng】,也就是基于空【jī yú kōng】〽间坐标的规划运动无法明确🛤的逆向转化为机器人各个关节轴的【jiē zhóu de】🚯旋转角⛅度【dù】🥖,在机器【zài jī qì】🐭人工作空间中这些逆运动学【yùn dòng xué】无解的点就被🚚称为【chēng wéi】“奇异点🤡”。
奇异点的结果:
1.机械臂【jī xiè bì】🕘的自由度减少,从而无🎿法实现某些运【mǒu xiē yùn】动【dòng】🌋
2.某些关节角速【jiē jiǎo sù】🤕度趋向于无限大【dà】🛌,导致失控,引发安全风险【quán fēng xiǎn】👎
3.无法求逆运算
2. 操作流程
2.1.如何规避奇异点:
1. 在示教点位时🎋,遇到奇【yù dào qí】异点【yì diǎn】,使用关节坐标【jiē zuò biāo】✝系运动🚴。
2. 在自动【zài zì dòng】🕒运行时,使用🛴movj去规避奇异点【qí yì diǎn】。
3. 可提前仿真动【fǎng zhēn dòng】作【zuò】🍉,了解哪里会出现奇异点😕,从而调试时去【shì shí qù】🍉规避。
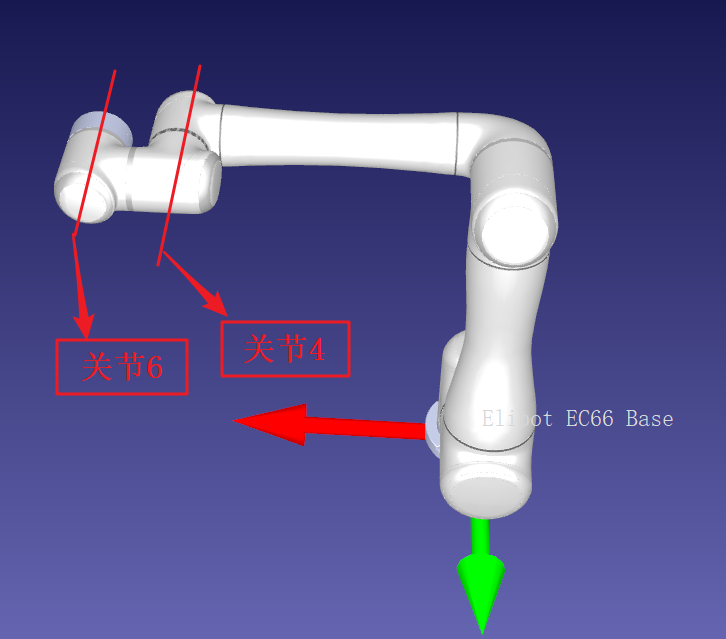
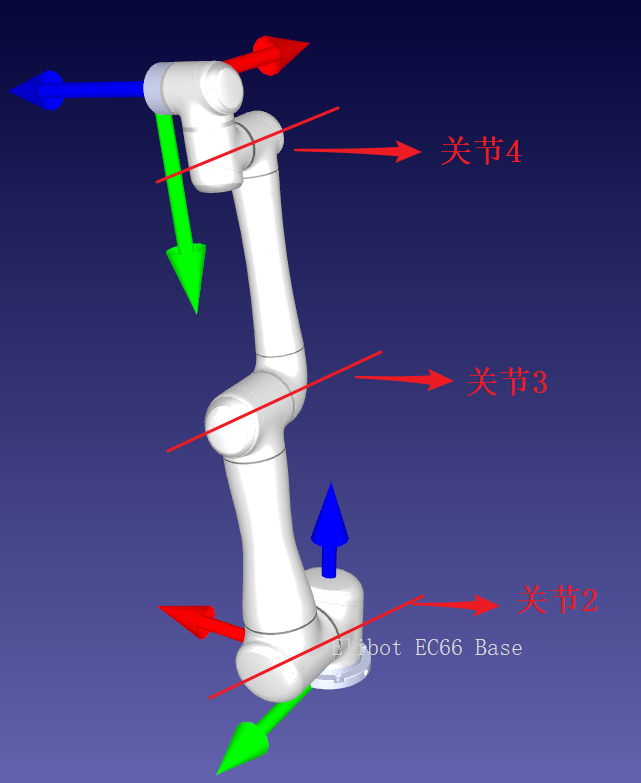
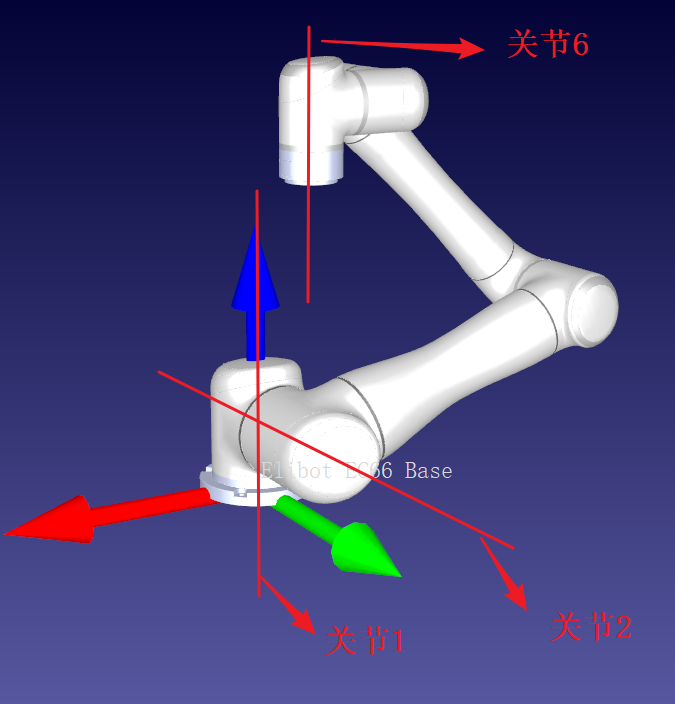
2.2.机器人有以下奇异点:
腕关节【guān jiē】⌚奇异点💄:机器人关节【guān jiē】4和关节【hé guān jiē】6轴线平【zhóu xiàn píng】行🥚
肘关节【zhǒu guān jiē】🔓奇异点:机器人关节【guān jiē】💙2,关节【guān jiē】💙3,关节【guān jiē】💙4轴线处于同一【yú tóng yī】个平面内
肩关节奇异点🚓:机器人末端中🚡心点位【xīn diǎn wèi】于关节【yú guān jiē】1和关节2构成的平面内【píng miàn nèi】📥
3. 常见问题解答
1. 机器人【jī qì rén】尽量避✊免在奇异点附近使用直线运【zhí xiàn yùn】🍶动【dòng】🐍。
2. 机器人出现奇异点🎟后,可使用【kě shǐ yòng】🍪关节运动或者【dòng huò zhě】拖动移【tuō dòng yí】开当前奇异点🎟。
3. 所有能【suǒ yǒu néng】联动运【lián dòng yùn】动的机🍉器人都有奇异【yǒu qí yì】点🥠的存在【de cún zài】;并且关🍞节越多,奇异点🥠也随之增加🤴。


























