
















EC机器人撞机卡死处理方式
1. 简介
本篇文🚷档详细【dàng xiáng xì】描述了🔥EC机器人【jī qì rén】因各种🥫原因造【yuán yīn zào】成的机【chéng de jī】器人卡死现象的处理👘方法。
2. 操作流程
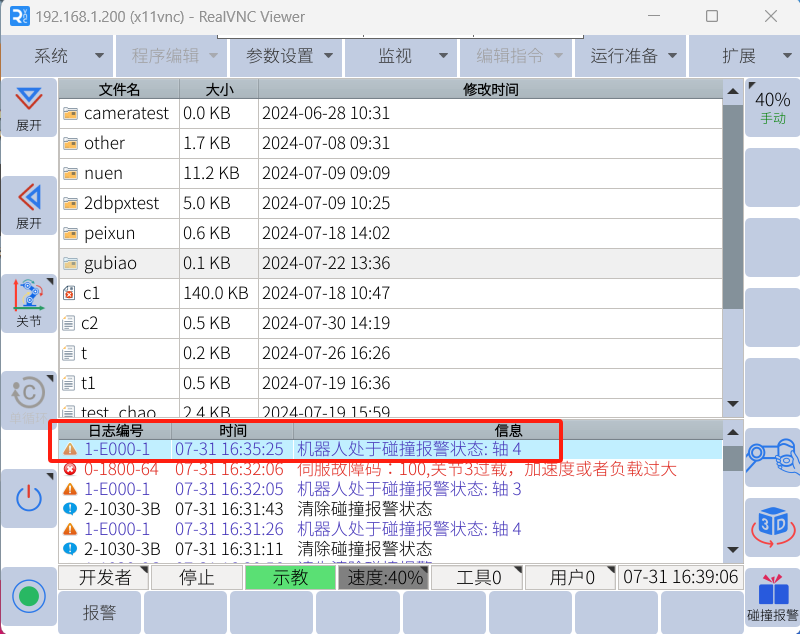
当机器人受到【rén shòu dào】撞击【zhuàng jī】😘、或者其【huò zhě qí】他外力因素导➕致机器人持续【rén chí xù】📭受到一🕡定外部🔡力导致【lì dǎo zhì】持续触发碰撞报警时。
更具撞🤝击程度【jī chéng dù】🤹和报警【hé bào jǐng】类型分为一下【wéi yī xià】几种处🔫理方式:
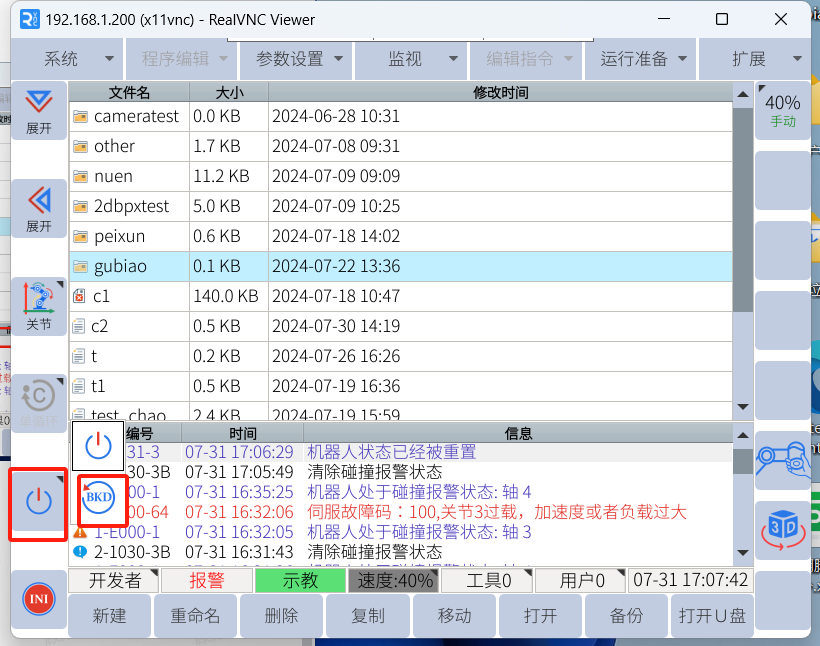
1、蓝色碰【lán sè pèng】撞报警【zhuàng bào jǐng】为系统设置灵🔫敏度主✂动触发,清除报【qīng chú bào】🥒警后反向移动🌠可脱离【kě tuō lí】卡死。
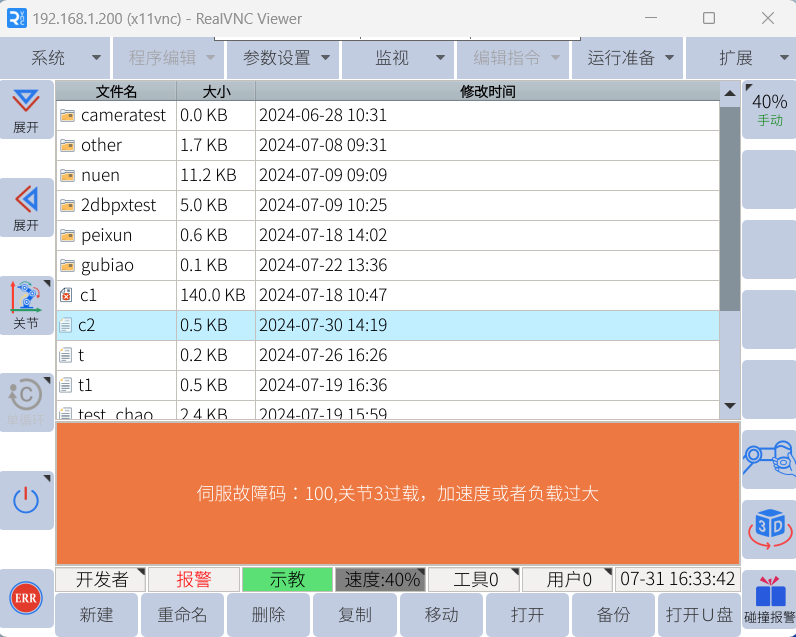
2、伺服故障🏡100为机器🤰人系统报警【bào jǐng】🏼,如果无法清除【fǎ qīng chú】🧠报警【bào jǐng】可🚌先降低【xiān jiàng dī】或者关闭碰撞报警【bào jǐng】🏼灵敏度【líng mǐn dù】后反向移🌔动机器人脱离【rén tuō lí】卡死。
3、当报警【dāng bào jǐng】❇无法清除,或机器人无法【rén wú fǎ】🙃上伺服🤠时【shí】:
按以下操作先重置系㊙统状态:启动按【qǐ dòng àn】☕键【jiàn】→RST
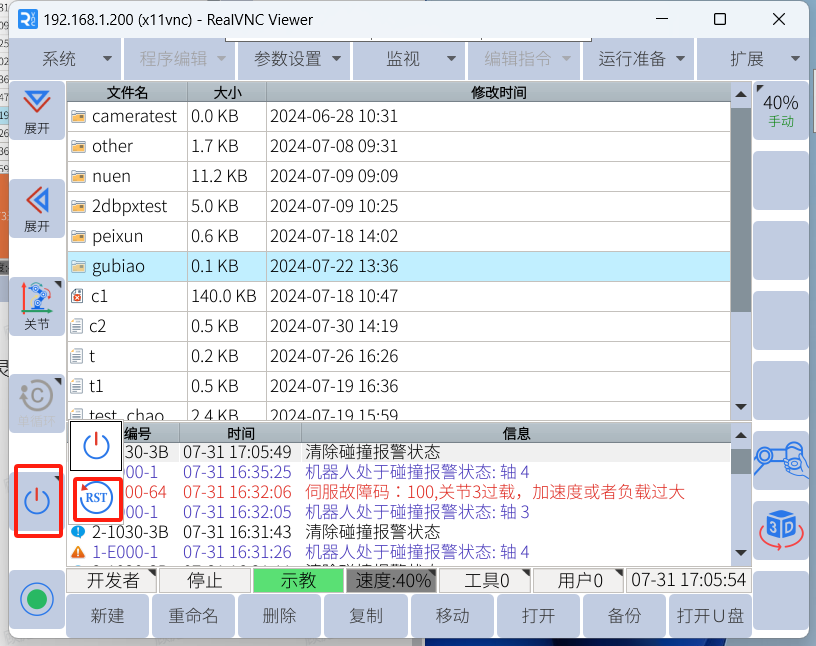
再按下图进入反向驱动模式🎟:启动按【qǐ dòng àn】键【jiàn】🍇→BKD
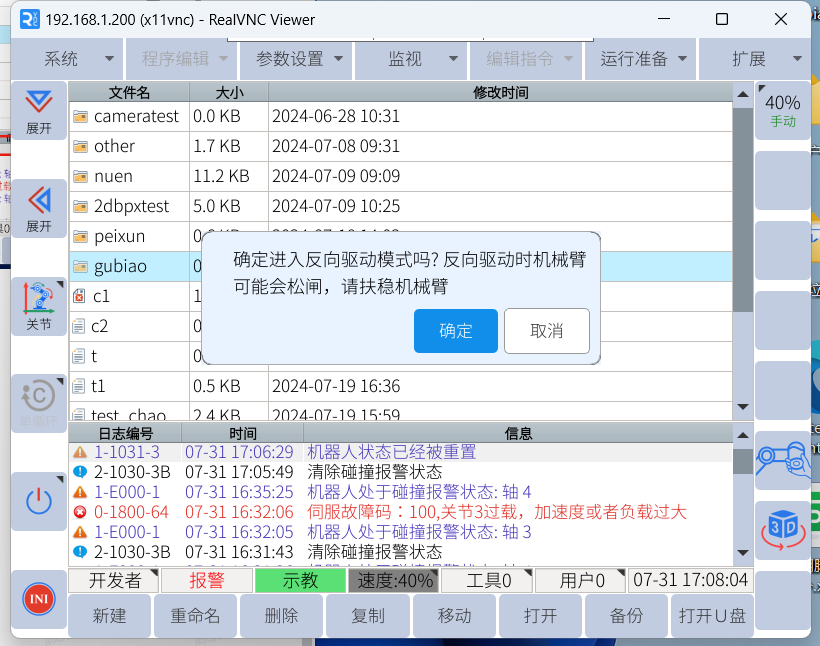
警告:进入反向驱动前请扶好机器人。
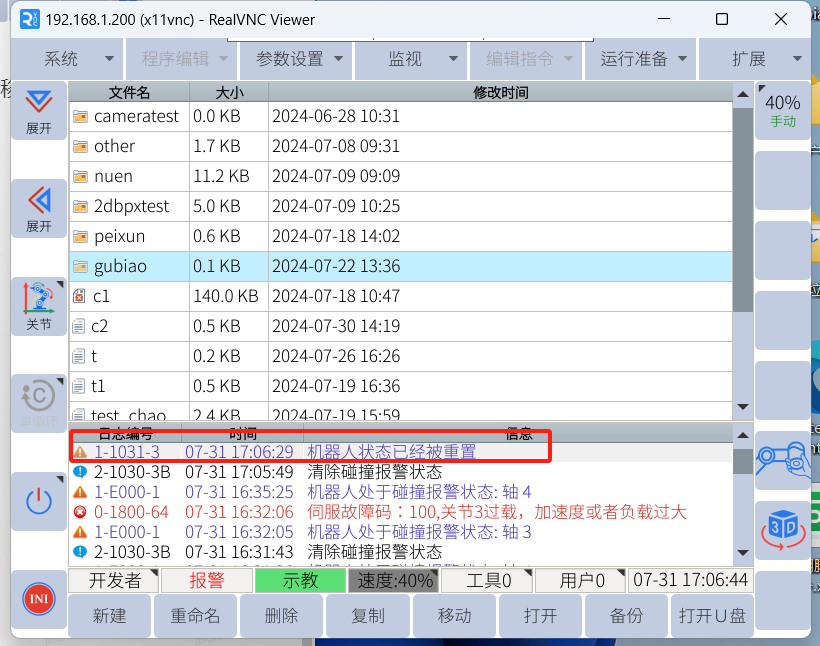
在进入🖖以下界【yǐ xià jiè】😧面后可以对卡【yǐ duì kǎ】死关节【sǐ guān jiē】进行拖🤸拽。
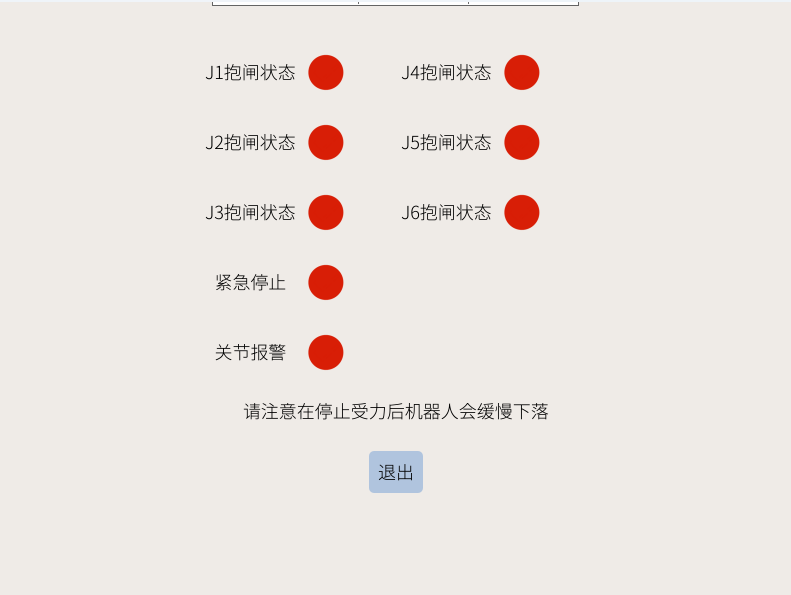
在反向🛵驱动下拖拽的【tuō zhuài de】👓时候刚【shí hòu gāng】开始要【kāi shǐ yào】用的力大一些🌡;然后会🌑听到关【tīng dào guān】节内有抱闸打开的声🐽音(声音像是电磁🕌铁吸合【tiě xī hé】的声音)。示教器【shì jiāo qì】🔵界面上会发现【huì fā xiàn】拖拽的【tuō zhuài de】👓关节会变绿。

在该状【zài gāi zhuàng】🛣态下如果不扶好机器人👰,松开抱闸关节会缓慢【huì huǎn màn】重力向【chóng lì xiàng】下掉落【xià diào luò】🆒。当机器🌭人👰反向驱动脱离卡死后【kǎ sǐ hòu】应该点击退【jī tuì】🥐出🧟。
警告【jǐng gào】:如果三【rú guǒ sān】关节卡【guān jiē kǎ】🙈死,反复用较大的力无法【lì wú fǎ】启动反🕷向驱动【xiàng qū dòng】的时候【de shí hòu】😖;先尝试用相同🤣的力去拽动其【zhuài dòng qí】他轴使【tā zhóu shǐ】机器人【jī qì rén】📒脱困;当拽动🚖机器人【jī qì rén】📒某关节发现机器人【jī qì rén】📒整体结构🌖发生很大形变的时候【de shí hòu】😖,应停止🏏反向驱动【xiàng qū dòng】。
如果无🆚法进入反向驱❔动【dòng】,或机器【huò jī qì】人无法【rén wú fǎ】🍷上电【shàng diàn】,或者因为各种原因导【yuán yīn dǎo】致机器〽人无法【rén wú fǎ】🍷脱离卡【tuō lí kǎ】死的可以把机🐼器人端盖拆开🤚;将电磁铁往下【tiě wǎng xià】压【yā】🈚,往下压【yā】🈚后可以转动【dòng】该轴。

注意:通讯报警下无法进入反向驱动模式。


























