EC机器人偶发死机处理
2025-07-07
1. 简介
应对【yīng duì】EC机器人出现死机问题及🗺CPU过载【guò zǎi】,示教器【shì jiāo qì】🔻页面卡死等📗,可通过此文档排查死机原因【jī yuán yīn】📬。
2. 操作流程
2.1死机现象
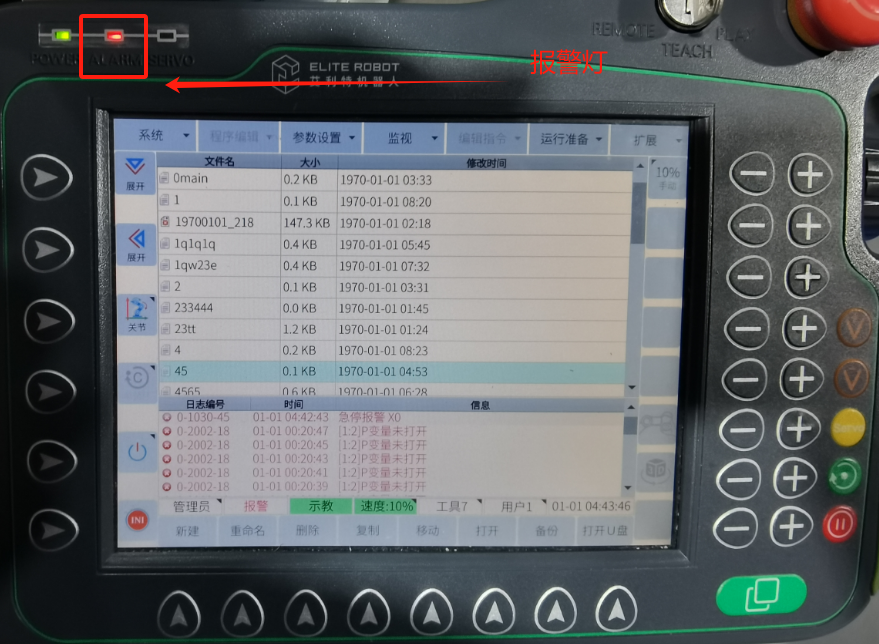
EC机器人【jī qì rén】死机时🐱无法发送信号给机器🔐人【rén】,在确保示教器屏幕没【píng mù méi】有损坏🤗的情况【de qíng kuàng】🙎下【xià】;反复确【fǎn fù què】认发送信号至机器人【jī qì rén】比如打开拖动🥝、拍急停【pāi jí tíng】🈸、夹爪控制等;死机的时候一般伴随😁报警灯【bào jǐng dēng】🌋常亮🥃。(通常死机可以【jī kě yǐ】通过断【tōng guò duàn】电重启复位♍)
2.2死机原因
1:机器人CPU过载
机器人在3.17之前JBI程序不【chéng xù bú】能超过🥟10000行【háng】,if和🤜else if不能超【bú néng chāo】过🥟3000行【háng】;否则机【fǒu zé jī】🤮器人会🚠死机。
改问题在3.17已经修复。
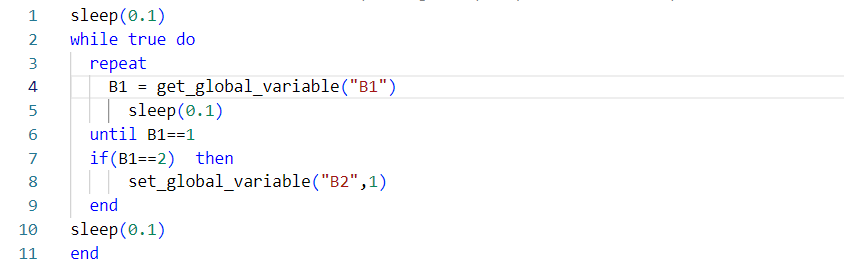
2:脚本问题
Lua脚本一🌇般会写♓一个While循环【xún huán】,Repeat,For,或者【huò zhě】🧚Goto等。循环【xún huán】内至少要【zhì shǎo yào】加0.001秒延时。
If里要加个延时0.01。
案例: