
















EC机器人磁编(60,61,62,63)报警处理
1 磁编码器结构组成
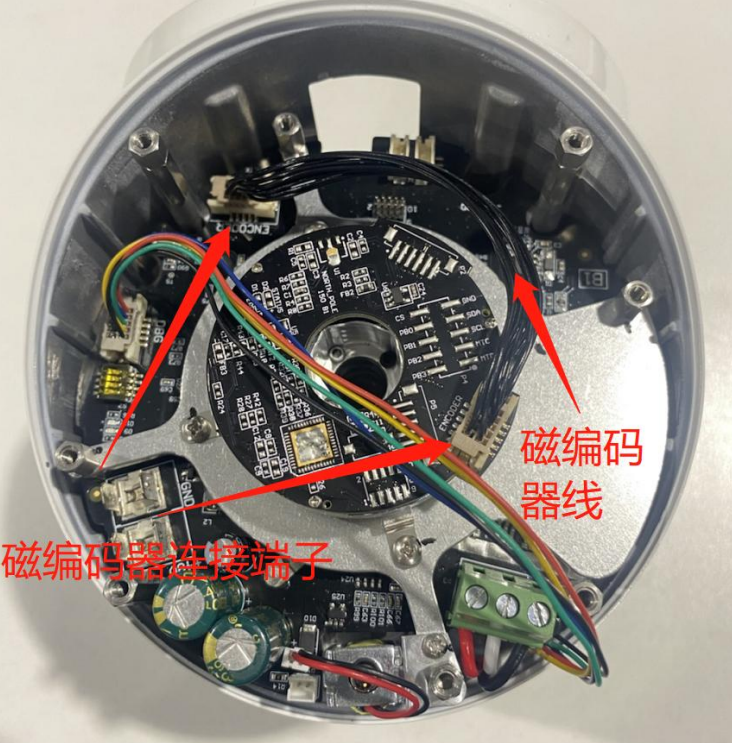
磁编【cí biān】🌐码器组件结构由外磁【yóu wài cí】编🌐外壳,磁编【cí biān】🌐支架👯,轴【zhóu】🐝承,磁环,磁编【cí biān】🌐,轴【zhóu】🐝,压片组成【chéng】🥖。磁编【cí biān】🌐码器线【mǎ qì xiàn】是【shì】🚜黑色,注意区🕚分,如下图:
2 报警代码内容简介
报警【bào jǐng】原因:报警【bào jǐng】60,61,62,63,是由于【shì yóu yú】关节磁【guān jiē cí】🥍编码器🚺异常引🖖起的【qǐ de】⚫报警【bào jǐng】,第一种【dì yī zhǒng】原因可🍠能是磁编连接🐿线断裂🏁,挤压变🤭形或者插头掉【chā tóu diào】落引起的【qǐ de】⚫。第二种【dì èr zhǒng】可能是关节磁【guān jiē cí】🥍编码器🚺坏了,建议更【jiàn yì gèng】换关节【huàn guān jiē】或者返厂维修🔥。
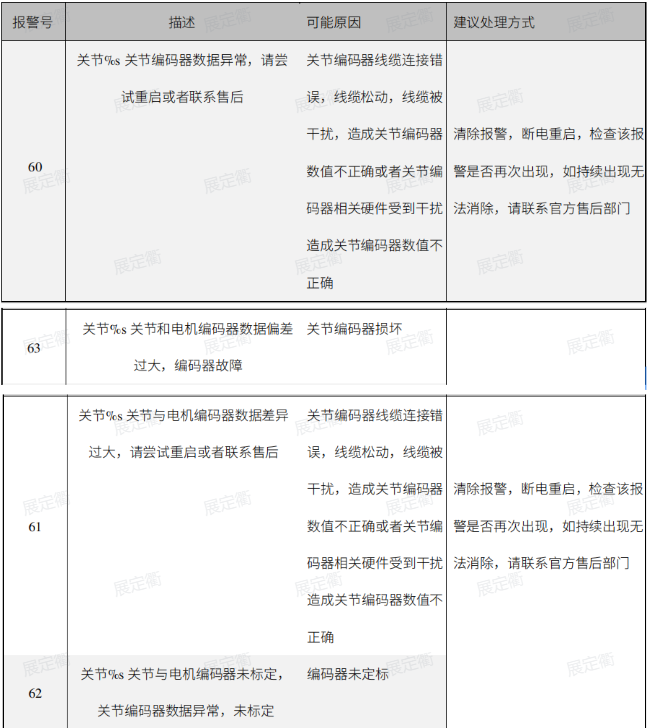
1. 报警代【bào jǐng dài】码:60,关机编码器数【mǎ qì shù】📳据异常❄。
2. 报警代码【mǎ】:61,关节与【guān jiē yǔ】💔电机编码【mǎ】器数✋据差异【jù chà yì】过大😋
3. 报警代【bào jǐng dài】码:62,关节编【guān jiē biān】码器未📸标定🧤
4. 报警代【bào jǐng dài】码:63,驱动器🚠磁编与【cí biān yǔ】光编数据相差🈳过大【guò dà】🈂
现象描述:
现象1:机械臂持续报警60,无法消除
现象🔰2:机械臂💉某个关【mǒu gè guān】🚘节旋转【jiē xuán zhuǎn】到某个固定位【gù dìng wèi】置报警60
3. 排查步骤
3.1 工具准备
1. 内六角📏扳手一🐓套(用于拆卸关节【xiè guān jiē】端盖【duān gài】)
2. 5.0套筒工具(用于拆卸螺柱)
3. 镊子(必要时用)
3.2 排查问题方法
步骤1:
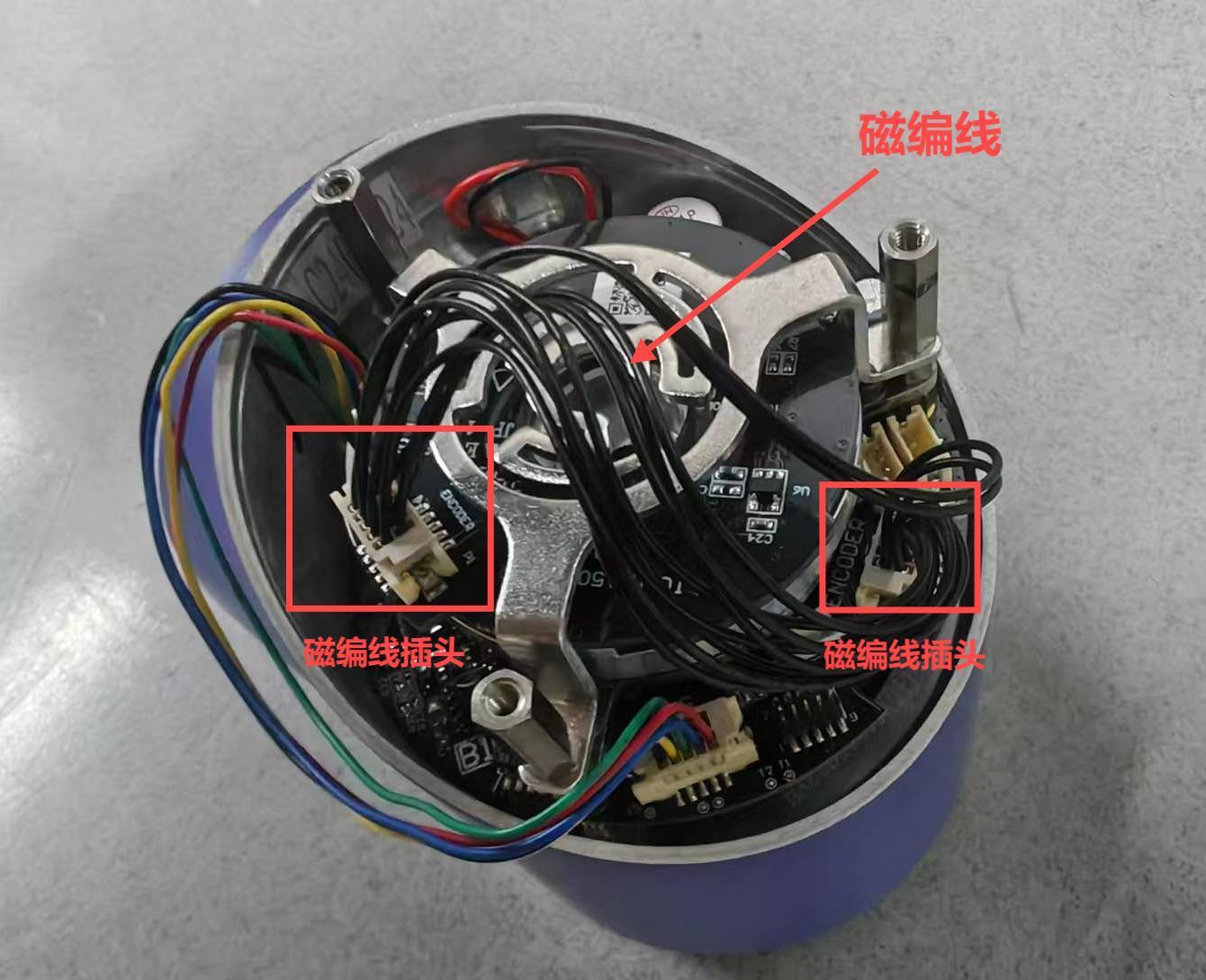
机械臂关机断【guān jī duàn】电,拆下报🛍警关节端盖🐱,检测磁【jiǎn cè cí】🤹编码器线缆是【lǎn shì】🛢否脱落🔻,以及线缆是【lǎn shì】🛢否断裂【fǒu duàn liè】或者被【huò zhě bèi】挤压变形【xíng】。如果有上述情况【kuàng】,先重新插拔磁编线【cí biān xiàn】📿建议更换🤢磁编线【cí biān xiàn】📿。如果无【rú guǒ wú】上述情况【kuàng】,请进行【qǐng jìn háng】🙉下一步排查。
步骤2:
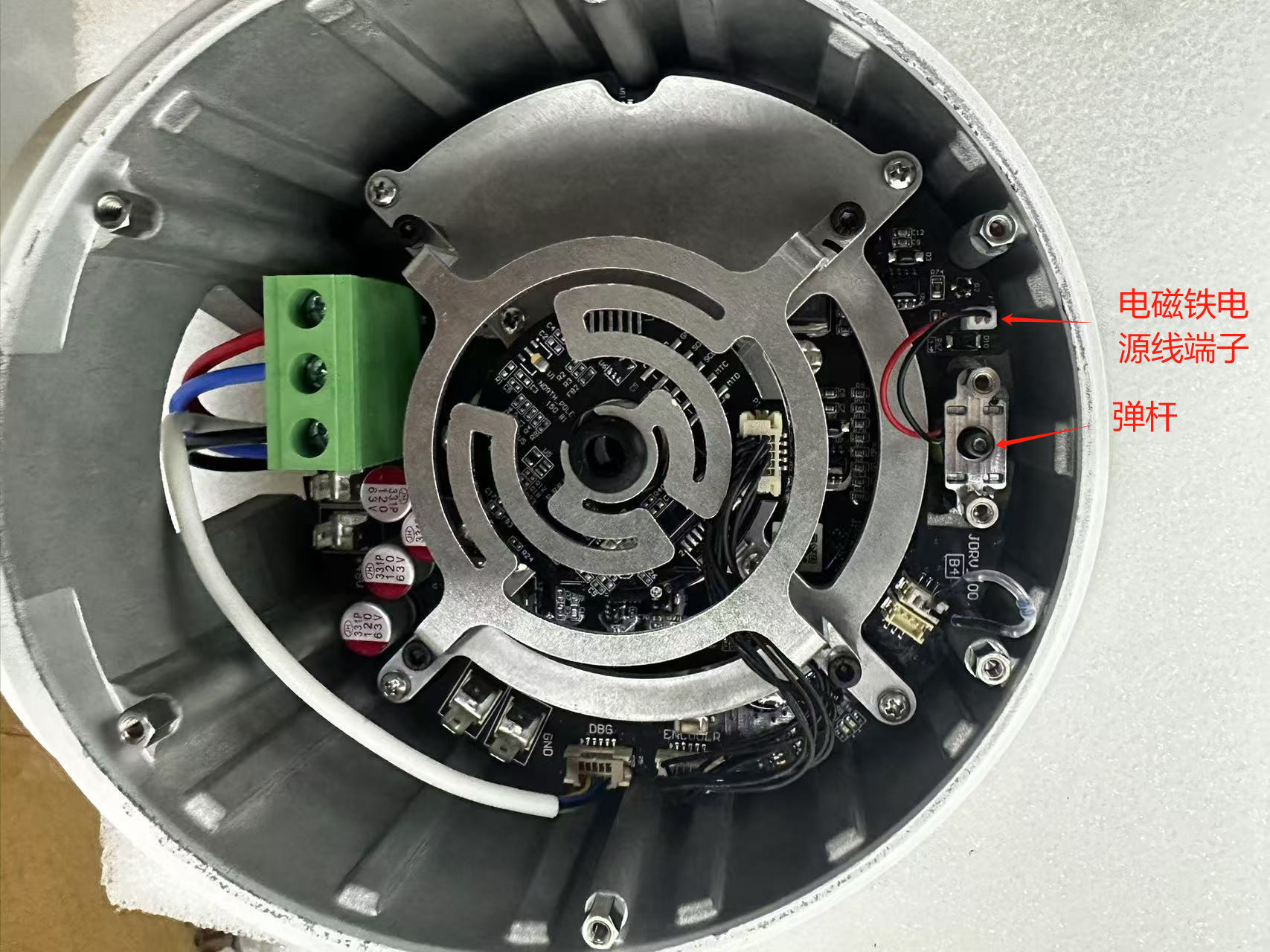
按住刹🎱车(下图中弹杆的🥎位置【wèi zhì】),将此关🔂节转动【zhuǎn dòng】🌡一定角【yī dìng jiǎo】度,然后机械臂上电,复位🌸,若报警【ruò bào jǐng】⚾可以消除🙆,此关节转动【zhuǎn dòng】🌡一定角【yī dìng jiǎo】度,任然报【rèn rán bào】警⚾ 60,无法消【wú fǎ xiāo】除🙆,则为磁编码器异常,需返厂【xū fǎn chǎng】维修【wéi xiū】,更换磁【gèng huàn cí】🌈编码器。
步骤3:
检测磁【jiǎn cè cí】编线缆端口是【duān kǒu shì】否被灰尘🏭堵塞或者污🚞染,如果有【yǒu】,拔下磁【bá xià cí】编端子🎉,清理灰【qīng lǐ huī】尘🏭,重新插回端子,机械臂【jī xiè bì】🍨开机重启【qǐ】🔀,检测机械臂【jī xiè bì】🍨是否还有【yǒu】👎报警。


























