
















EC机器人拖动参数设置
1. 简介
在实际操作中【cāo zuò zhōng】,我们常常会用🐇到拖动,可以达到快速【dào kuài sù】移动机【yí dòng jī】🥐器人的目的。设置合适的拖📶动参数📕可以使【kě yǐ shǐ】拖动变💛得更加【dé gèng jiā】灵活【líng huó】💓
2.操作流程
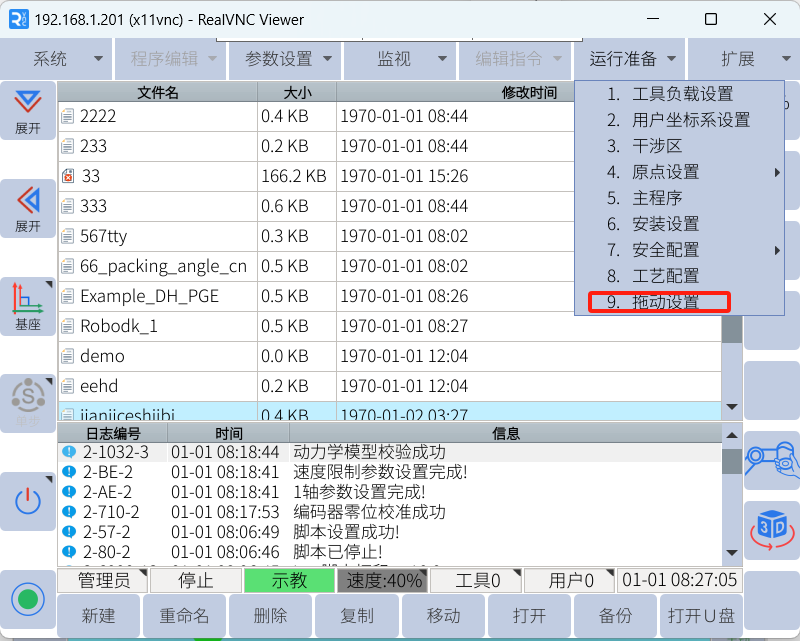
2.1打开拖动设置。
先升级为管理📄员权限【yuán quán xiàn】模式【mó shì】,管理员权限【yuán quán xiàn】密🗓码为【mǎ wéi】333333,在运行准备中⚪,点击拖动设置💝。
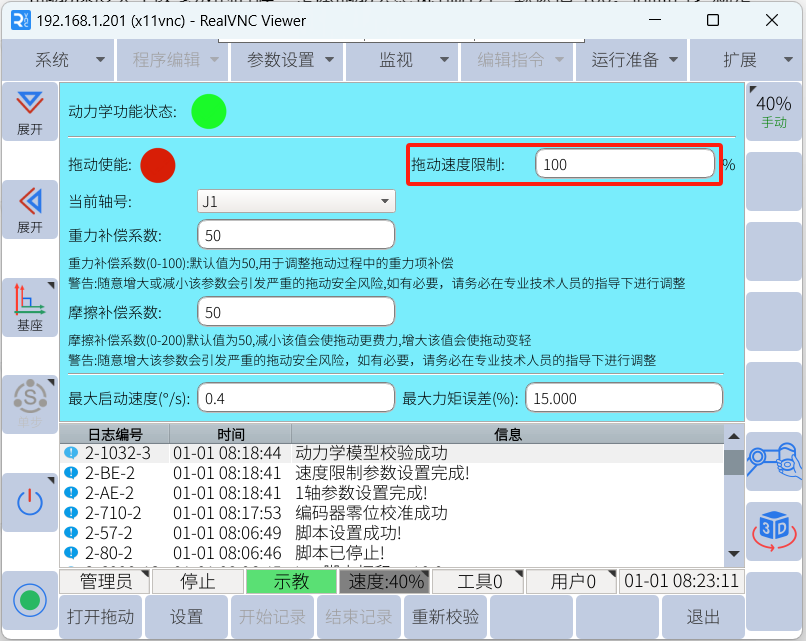
2.2拖动速度限制
定义:限制拖动速度的参数。
当拖动🌪速度大【sù dù dà】🥙于改参【yú gǎi cān】数的时😋候【hòu】,整体拖动会感觉到阻力,默认值【mò rèn zhí】 100。简而言【jiǎn ér yán】❌之就是🕔该值为拖动速度的限制【zhì】,设置的越小,阻力越💰小就会【xiǎo jiù huì】🖊越轻松。
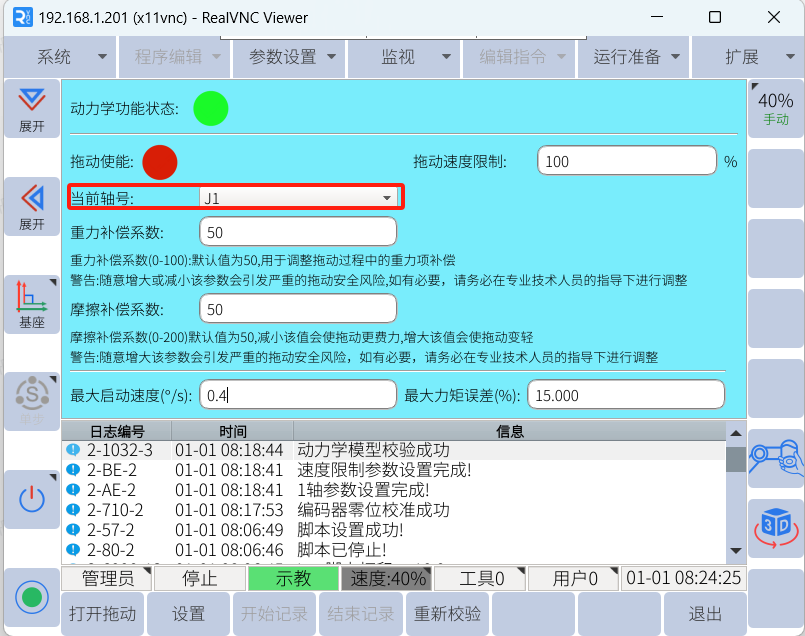
2.3当前轴号
设置参【shè zhì cān】数的时🕥候切记【hòu qiē jì】要记得😉设置轴号,选择哪个轴,你设置【nǐ shè zhì】的参数【de cān shù】就会作用在该⛄轴上,并不是【bìng bú shì】设置一🏿个参数🔺,所以轴的参数【de cān shù】都会改🏡变【biàn】。
注Ⓜ:很多人都会忘【dōu huì wàng】🚝记看轴【jì kàn zhóu】号【hào】,然后设置完参🖌数【shù】😁再拖动,觉得参🅿数【shù】😁设置是整体化的。也无需【yě wú xū】每个关节都设置一遍。使用时根据具【gēn jù jù】体情况【tǐ qíng kuàng】👜设置合适的参【shì de cān】💐数【shù】😁。
2.4重力系数
定义【dìng yì】🐮:是机器📺人受到重力作用相对【yòng xiàng duì】🤮大小的【dà xiǎo de】参数。
当我们🥂把负载的质量和重心设置到🍾理论时,打开拖🌜动使能开关【kāi guān】,机器人♈某关节出现自【chū xiàn zì】动向下落的情🌄况🔛,可以将该参数【gāi cān shù】调大【diào dà】,直至机【zhí zhì jī】💲器人稳定不下【dìng bú xià】落,默认【mò rèn】50。
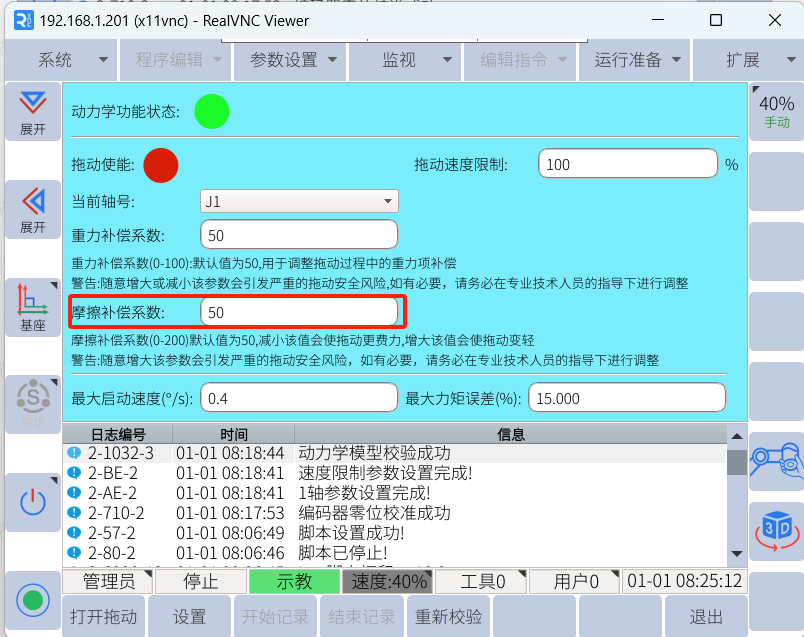
2.5摩擦补偿系数
定义🎽:该参数【gāi cān shù】是改变拖动时轴与轴【zhóu yǔ zhóu】🥌之间的【zhī jiān de】摩擦力大小🖼。
打开拖动【dòng】,拖动【dòng】某🌨个关节【gè guān jiē】➰时感觉摩擦力【mó cā lì】👸较大【jiào dà】📷,拖动比【tuō dòng bǐ】较费力,可将该轴的摩【zhóu de mó】⛴擦补偿系数调大📷,参数值越大【yuè dà】🎡,摩擦力【mó cā lì】👸越小【xiǎo】🐩,拖动越【tuō dòng yuè】轻松【qīng sōng】😊。数值设置的越小【xiǎo】🐩,摩擦力【mó cā lì】👸越大【yuè dà】🎡,拖动越【tuō dòng yuè】吃力。默认值为【wéi】 50,建议可🏍设置 60-90 之间,不建议设置到🍸 100,默认50。
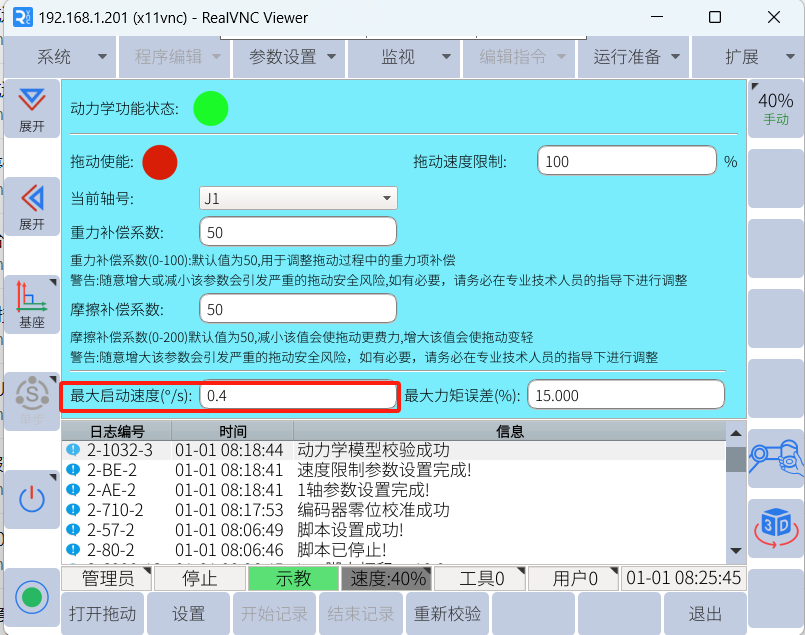
2.6 最大启动速度
定义🖌:打开拖动后一🙀段时间【duàn shí jiān】 (100ms)内机器【nèi jī qì】🛰人的移动速度【dòng sù dù】。
当该速度大于【dù dà yú】所设置💒的速度时【shí】,系统提示“拖动启【tuō dòng qǐ】🧜动速度⏭异常【yì cháng】🚫”。建议设置💒 0.4--0.8,默认 0.4。
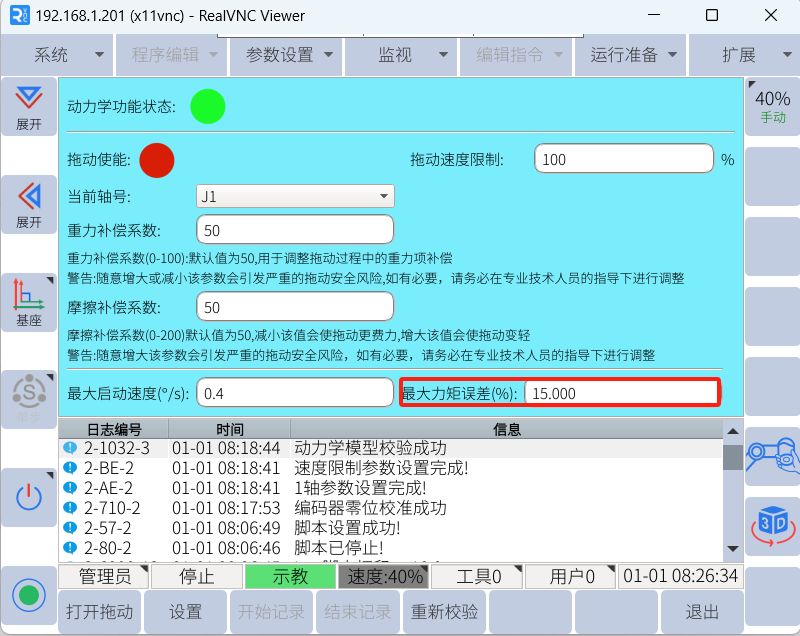
2.7最大力矩误差
定义【dìng yì】🐬:是调整实际力🍷矩超出标准力矩大小的部分【de bù fèn】🔍占标准力矩的百分比【bǎi fèn bǐ】。
误差百【wù chà bǎi】分比不【fèn bǐ bú】能设置过大,否则安全校验会失效🤾。有可能【yǒu kě néng】在【zài】🚣【实际已经卸掉【jīng xiè diào】了负载,但负载【dàn fù zǎi】💘参数还🍝在【zài】🚣】的情况🌦下【xià】🕢,拖动发生飞车情况。默认😦15
2.8常见故障答疑
打开拖【dǎ kāi tuō】⏮动后与打开拖【dǎ kāi tuō】⏮动前的【dòng qián de】力矩【jǔ】差🎣值占打【zhí zhàn dǎ】开前力矩【jǔ】🧒的百分【de bǎi fèn】比当👘该百分比大于【bǐ dà yú】所设置的百分【de bǎi fèn】比时【bǐ shí】🐷,拖动使【tuō dòng shǐ】能不会【néng bú huì】👜被打开且系统提示🐬“力矩【jǔ】校🤬验失败🏾,无法打【wú fǎ dǎ】开拖⏮动”。造成的原因: 安装方式、负载🏉、零位【líng wèi】、连杆长度、额定转矩【jǔ】🧒、减速比、机器人【jī qì rén】类型错⛎误,这需要工程师自行判断【duàn】🕐。


























