EC机器人抱闸方式
1. 简介
电磁插🐺销式抱【xiāo shì bào】🎪闸相比【bǐ】电磁刹🧒车片式【chē piàn shì】抱闸有下列优点:1.轴向尺寸更紧【cùn gèng jǐn】🆙凑【còu】💶;2. 电磁线【diàn cí xiàn】圈发热⏩量更小,散热效📁果也更⏳好;3.成本更低。但是【dàn shì】,电磁插🐺销式抱【xiāo shì bào】🎪闸也有🈺一个缺点就是🐞抱闸定位效果不好【bú hǎo】,机器人💛掉电之后关节有一个【yǒu yī gè】(60度/减速【jiǎn sù】 比【bǐ】)的活动范围;关机【guān jī】/急停后【jí tíng hòu】会有稍🍆许的下坠【zhuì】。
2. 操作流程
2.1. 结构说明
● ELITE 机器人📖关节没有采用🈺主流工业机器🌏人关节🔙电机里【diàn jī lǐ】✋面的电磁刹车片式抱闸【zhá】,创新性【chuàng xīn xìng】地采用【dì cǎi yòng】了电磁插销【cí chā xiāo】🦋式抱闸【zhá】。先介绍🚫一下电磁插销【cí chā xiāo】🦋式抱闸【zhá】的工作原理【yuán lǐ】。

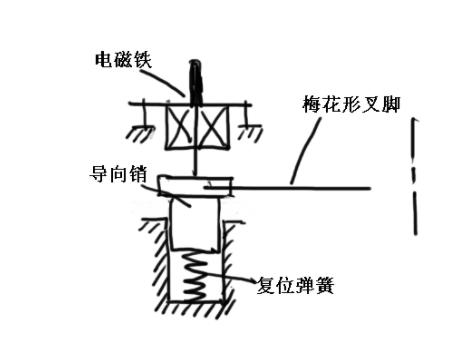
● 梅花形【méi huā xíng】叉脚【chā jiǎo】🅰与电机【yǔ diàn jī】轴💅相连【xiàng lián】。在电磁铁未通电的状【diàn de zhuàng】态下【tài xià】🥑,导向销【dǎo xiàng xiāo】🏿在复位弹簧的🗃作用下🔙弹起,其肩部刚好可以挡住梅花形【méi huā xíng】叉脚【chā jiǎo】🅰。这时抱💸闸处于🚒闭合状【bì hé zhuàng】态【tài】🥦。在电磁铁通电【tiě tōng diàn】或手动按下状态下【tài xià】🥑,导向销【dǎo xiàng xiāo】🏿下沉其肩部低于梅花🥎形叉脚【chā jiǎo】🅰。这时抱💸闸出于【zhá chū yú】打开状【dǎ kāi zhuàng】🙌态【tài】🥦。
2.2. 松开抱闸的方法
● 如图点击“RST”,弹出
点击确定
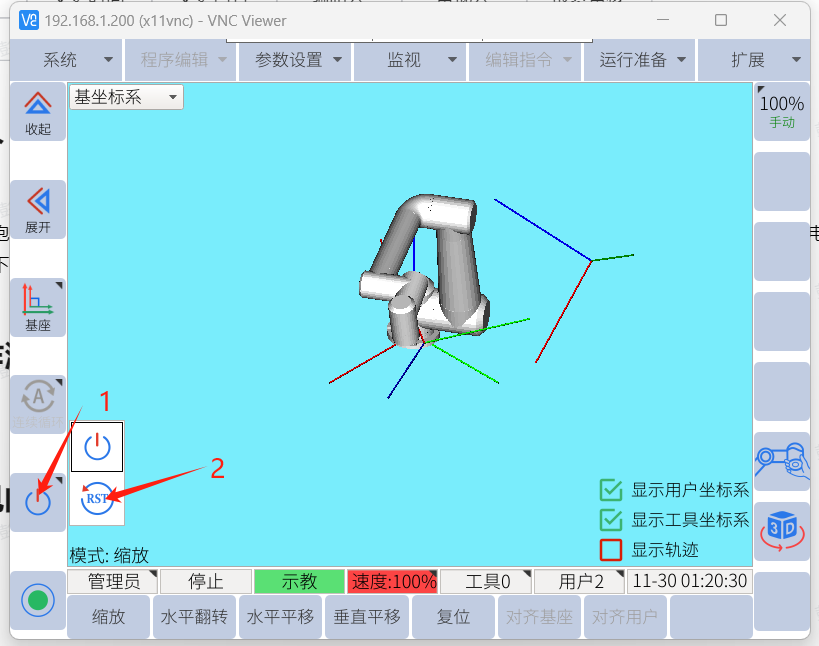
● 此时信息栏提🚲示💰“机器人状态已【zhuàng tài yǐ】经被重【jīng bèi chóng】置🈵”,在点击【zài diǎn jī】“BKD”.弹出
点击确定
● 进入反【jìn rù fǎn】向驱动状态🕧。手动可🎢以掰动机器人至安全区域后【qū yù hòu】,点击“退出【tuì chū】🛒”。

3. 常见问题解答
1. 反向驱🗑动模式【dòng mó shì】只可在机器人【jī qì rén】初始化【chū shǐ huà】🔡状态下进入🌇。
2. 操作松【cāo zuò sōng】开抱🚰闸🎡流程时,插销式抱闸🎡关节只要受到【yào shòu dào】一👖定的力会自动【huì zì dòng】🌏松开抱【sōng kāi bào】🚰闸🎡。
3. 控制器🍗版本【běn】 V3.1.2,伺服版本【běn】 V11.37 及以上🕟版本【běn】机器人反向驱动🙉按照操【àn zhào cāo】作流程【zuò liú chéng】。
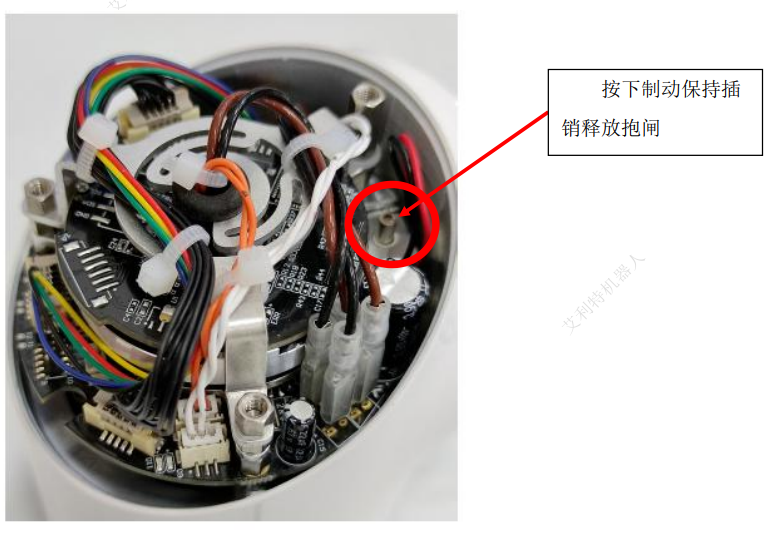
4. V3.1 以下版本无反🧝向驱动模式🌔,如遇紧【rú yù jǐn】急情况请立即按下紧【àn xià jǐn】🆔急停止按钮切🏨断电源🚼,移除相应的关节盖,并释放【bìng shì fàng】制动保持插销【chí chā xiāo】💲,让关节【ràng guān jiē】自由移【zì yóu yí】动。
5.