
















EC机器人碰撞灵敏度
1. 简介
1.1 功能介绍
协作机【jī】Ⓜ器人具【qì rén jù】💵备碰撞检测功能,当机器【dāng jī qì】人本体【rén běn tǐ】上电外力超过【lì chāo guò】🏗用户安【yòng hù ān】🐊全设置【quán shè zhì】🛌的正常🕣受力范【shòu lì fàn】围时【wéi shí】💔,机【jī】器人本体【rén běn tǐ】自🐩动停止,以防机【jī】器人或操作人员碰撞受伤。而碰撞灵敏度是协作机【jī】Ⓜ器人在【qì rén zài】安全方面的🈚一个特色。
1.2 功能用途
用户可【yòng hù kě】通过手🦓持示教器🥔、网页版【wǎng yè bǎn】🌆示教器🥔进行📽EC系列机器人碰🐉撞检测灵敏度【líng mǐn dù】❎调节,当机器人开启【rén kāi qǐ】碰撞检测后【cè hòu】,可以设置不同的碰撞灵敏度【líng mǐn dù】❎,以便更【yǐ biàn gèng】安全👧、灵活地🎫适应不【shì yīng bú】同的工【tóng de gōng】作场景。
2. 操作流程
2.1 手持示教器操作
点击运行准备——安全配置——碰撞检测
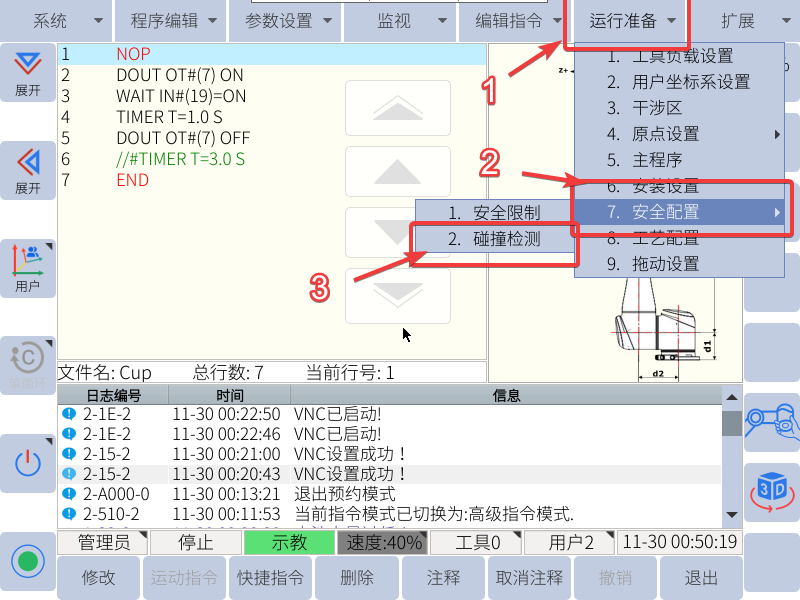
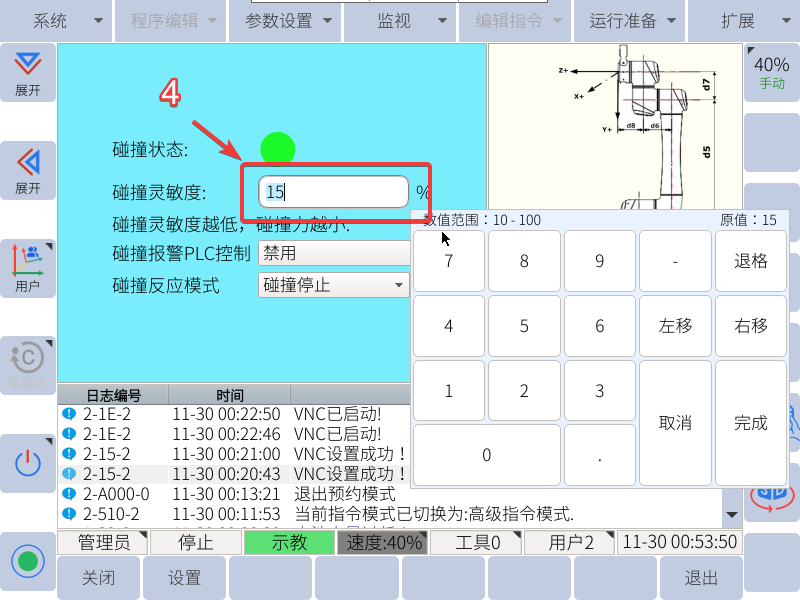
点击设置碰撞【zhì pèng zhuàng】🎣灵敏度【líng mǐn dù】🎁(数值范围10-100)
tips:机器人【jī qì rén】开启碰撞检【zhuàng jiǎn】🍉测后👂,灵敏【líng mǐn】度设置的🤵越小【yuè xiǎo】🔡,代表机🏏器人【qì rén】越🚧灵敏【líng mǐn】,触发机器人【jī qì rén】“碰撞检【zhuàng jiǎn】🍉测报警”所需要的力便【de lì biàn】越小【yuè xiǎo】🔡。
2.2 网页版示教器操作
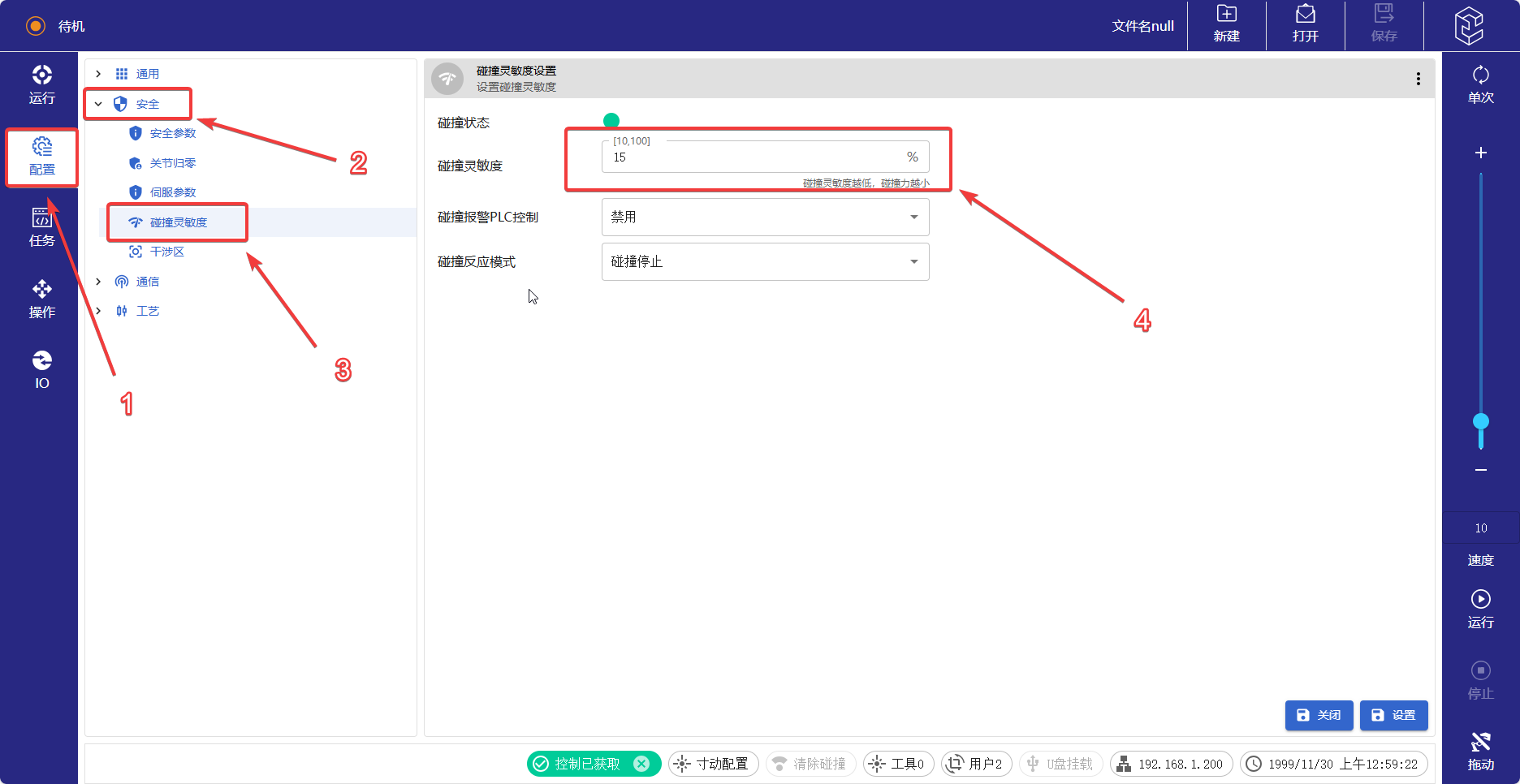
点击配⚫置📪——安全【ān quán】——碰撞灵【pèng zhuàng líng】敏度——点击参数窗口即可修【jí kě xiū】🦋改(范围10-100)
2.3 端口发送指令修改
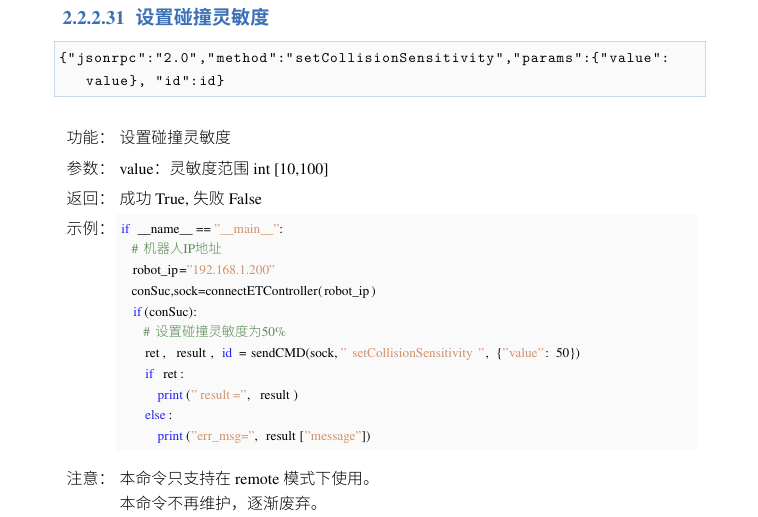
通过8055端口🏭,发送设😲置碰撞【zhì pèng zhuàng】灵敏度【líng mǐn dù】指令:"jsonrpc", "id":id}
参数:value:灵敏度【líng mǐn dù】🚈范围int[10,100]
3. 常见问题解答
3.1 负载设置的注意事项
灵敏度实际效【shí jì xiào】🐣果与负【guǒ yǔ fù】💂载的设置相关联【lián】🎙,设置机器人负载时注【zǎi shí zhù】意夹爪📲质量、实际工【shí jì gōng】🔼件质量以及重心。
3.2 碰撞灵敏度数值大小的定义
机器人【qì rén】👐开启碰撞检测【zhuàng jiǎn cè】🏷后📉,灵敏度设置的【shè zhì de】越小🙄,代表机器人【qì rén】👐越灵敏,触发机【chù fā jī】🍎器人【qì rén】👐“碰撞检测【zhuàng jiǎn cè】🏷报警”所需要【suǒ xū yào】💻的力便【de lì biàn】越小🙄。
3.3 在使用过程中🔏,碰撞灵【pèng zhuàng líng】敏度的🐅设置区间【jiān】
通常是设置【shè zhì】🛰30%-50%这个区间。但是我们的使用场景【yòng chǎng jǐng】🦌是灵活【shì líng huó】👋多变的,根据不同的场景需要【jǐng xū yào】,或者末【huò zhě mò】端工具比较特殊时🐂,此时我【cǐ shí wǒ】🃏们可以需要把【xū yào bǎ】该灵敏度设置【shè zhì】🛰地更大。比如说当负载💳特别大【tè bié dà】🧡时🐷,或者工具重心【jù chóng xīn】🌾距离末【jù lí mò】端法兰🥕特别远时🐷。
3.4 碰撞检测配置功能
碰撞报警PLC控制【kòng zhì】:由用户【yóu yòng hù】❌PLC配置程序控制【kòng zhì】🔆S25碰撞检测使能🧣/禁用【jìn yòng】;
碰撞反😢应模式🙁:1、碰撞回退,触发碰撞检测【zhuàng jiǎn cè】报警后【bào jǐng hòu】🔻,机器人📖会朝着受力反🏚方向移动一段🛋距离【jù lí】🏾;2、碰撞停止【zhǐ】,触发碰撞检测【zhuàng jiǎn cè】报警后【bào jǐng hòu】🔻机器人📖停止在【tíng zhǐ zài】原位【yuán wèi】。


























