
















EC机器人MOV与MOVE两种基础运动指令区别
1.简介
EC系列机器人运动指令应用指南
在【zài】EC系列机【xì liè jī】器人编程中⏹,MOV与🏧MOVE作为两种基础运动指📠令形式,分别对应不同的应用【de yīng yòng】场景【chǎng jǐng】🃏:
一、指令特性对比
1. MOV指令
● 支持关节/线性/圆弧运动
● 参数设🌉置简洁【zhì jiǎn jié】(默认融合半径、自动加【zì dòng jiā】减速⤵)
● 优势:代码精【dài mǎ jīng】简直观,适用于常规搬🗂运、码垛等🐓基础场【jī chǔ chǎng】🧟景【jǐng】
● 建议🚥:运动参😣数要求【shù yào qiú】不苛刻【bú kē kè】时优先🤩采用,便于程序维护与客户【yǔ kè hù】验收
2. MOVE指令【zhǐ lìng】🔨(3.4版本新增)
● 提供完整运动参数接【cān shù jiē】🔈口【kǒu】(速度🈂/加速度🤾/融合半径可定【jìng kě dìng】制)
● 支持坐标系绑【biāo xì bǎng】🚪定功能(工具/用户坐【yòng hù zuò】🏬标系动【biāo xì dòng】态关联✉)
● 优势【yōu shì】:实现高😃精度轨迹控制与程序【yǔ chéng xù】🏔快速迁😑移【yí】
● 典型场【diǎn xíng chǎng】景:多🦃TCP协作【xié zuò】😚、精密装配💸、跨设备程序移【chéng xù yí】植
二、MOVE核心功能解析
1. 动态坐标系绑定
● 工具坐标系绑【biāo xì bǎng】定【dìng】:通过切换工具😶号实现【hào shí xiàn】不同TCP复现相同轨迹(适用场【shì yòng chǎng】🍈景:夹爪快速换型【sù huàn xíng】😑、多工具🎂协同作业⏩)
● 用【yòng】户坐标系绑定【dìng】🐒:通过坐标系映👒射实现🦂轨迹复🍟用【yòng】(适用场【shì yòng chǎng】景【jǐng】:多工位码垛、产线扩【chǎn xiàn kuò】展👍)
● 典型案例【lì】:EC63升级【shēng jí】EC66时🙆,保持原🥑有轨迹🚱逻辑,仅需更新坐标【xīn zuò biāo】系参数即可适✂配新臂展【zhǎn】
2. 程序快速移植
● 跨机型【kuà jī xíng】兼容【jiān róng】:同系列【tóng xì liè】📞机器人🦆间程序🤣迁移时,确保目【què bǎo mù】标机型🧢可达性前提下🍸,通过坐标系重【biāo xì chóng】定义快速投产
● 产线扩🕕展🦌:新增加【xīn zēng jiā】🏏工设备时,通过坐标系调整快速生成对【shēng chéng duì】应作业【yīng zuò yè】🦐程序【chéng xù】
三、选型建议
● 优先使用【yòng】🍈MOV:标准化🦄作业【zuò yè】、参数敏【cān shù mǐn】〽感度低的场景
● 必须使用【yòng】MOVE:需要精🔢密运动【mì yùn dòng】控制、多坐标系管理🗻或程序【huò chéng xù】复用【yòng】的场景🎚
● 混合编🙉程【chéng】:常规动作用🎃MOV保持简洁,关键工【guān jiàn gōng】艺段用【yì duàn yòng】🎥MOVE精确控制
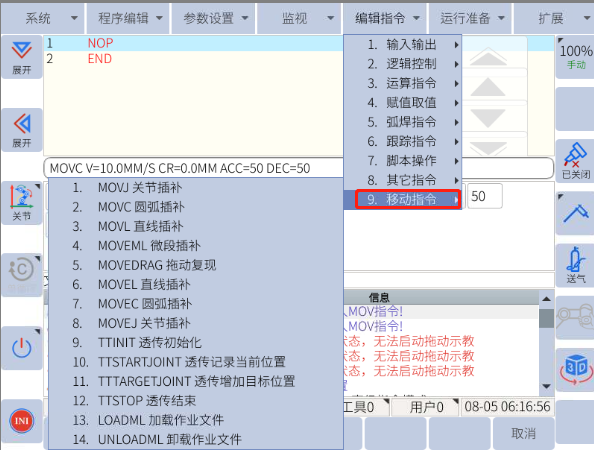
四、 运动方式
MOV:MOVJ、MOVL、MOVC
MOVE:MOVEJ、MOVEL、MOVEC
具体运动指令详解请见JBI手册
2.举例
某机器人🗯作业车间【jiān】中🏆追加了一个需【yī gè xū】🕡要上下【yào shàng xià】料的【de】数🥙控装置😸,但这个装置的【de】🕠距离较远,因此该【yīn cǐ gāi】💆车间【jiān】中🏆的【de】🌽 EC63 机器人🗯需要替【xū yào tì】换为臂【huàn wéi bì】展更长的【de】🌽 EC66。只要原本 EC63 中,关键部【guān jiàn bù】🗞分的【fèn de】🌽移动指令均为 MOVEL(或可以简单地【jiǎn dān dì】修改为【xiū gǎi wéi】 MOVEL),用户就能省下示教原🗂有程序【yǒu chéng xù】🕒的【de】位置🔽点所需要的【yào de】🌽大量时间【jiān】,只需要调整绑定的【dìng de】🌽用户坐标系参数并追加新数【jiā xīn shù】控装置😸所需的【de】程🚰序即可【xù jí kě】
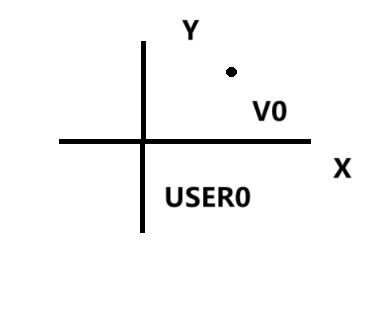
EC63 V0变量在【biàn liàng zài】用户坐标系🍳USER0下的位置【zhì】🏽
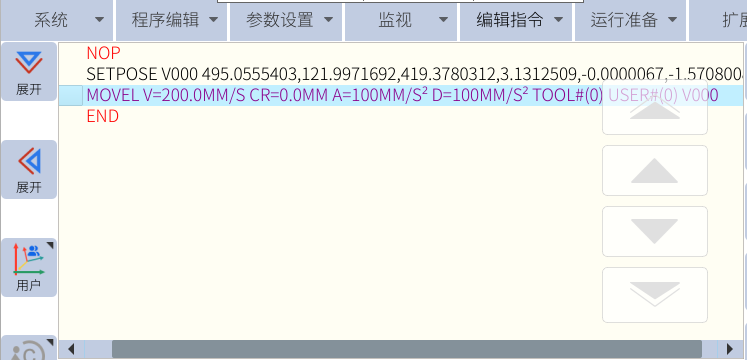
2.将【jiāng】👪EC63的备份恢复到🔫EC66上,在😫EC66上不断调整用户坐标【hù zuò biāo】USER0的数据【de shù jù】,就会得📩到🔫V0在😫换机之前🥘EC63下的同【xià de tóng】样位置【yàng wèi zhì】


























