
















EC机器人一键回原
1、简介
一个项【yī gè xiàng】目中,如果有【rú guǒ yǒu】一个较🌡好的回原逻【huí yuán luó】🏄辑,能够省下较多📞的启动【de qǐ dòng】时间🐟,也能避免机构💗干涉问【gàn shè wèn】🏘题【tí】。想要有⛵个安全🍟、有效的回原逻【huí yuán luó】🏄辑,需要我们对项目的工艺流程【yì liú chéng】要足够【yào zú gòu】了解。
2.操作流程
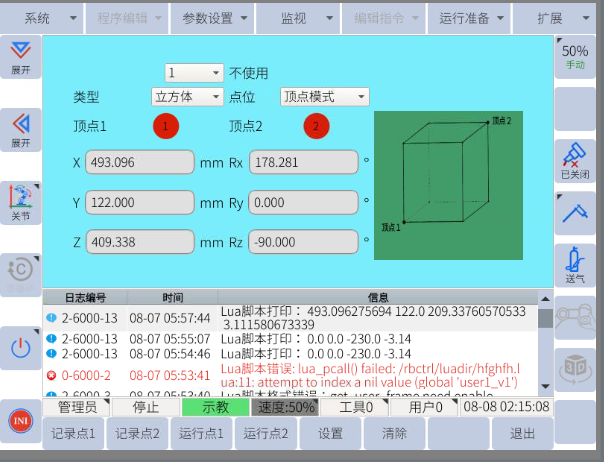
2.1利用干涉区功能回原:
以下图为例,将工作【jiāng gōng zuò】💝区域分为四个干涉【gè gàn shè】🌕区,以下图机器人【jī qì rén】🏑位置为【wèi zhì wéi】🍇Home点【diǎn】,会在四🏙个干涉【gè gàn shè】🌕区中进🐕行产品的取放,最终作【zuì zhōng zuò】业结束后会回到【dào】Home点【diǎn】。
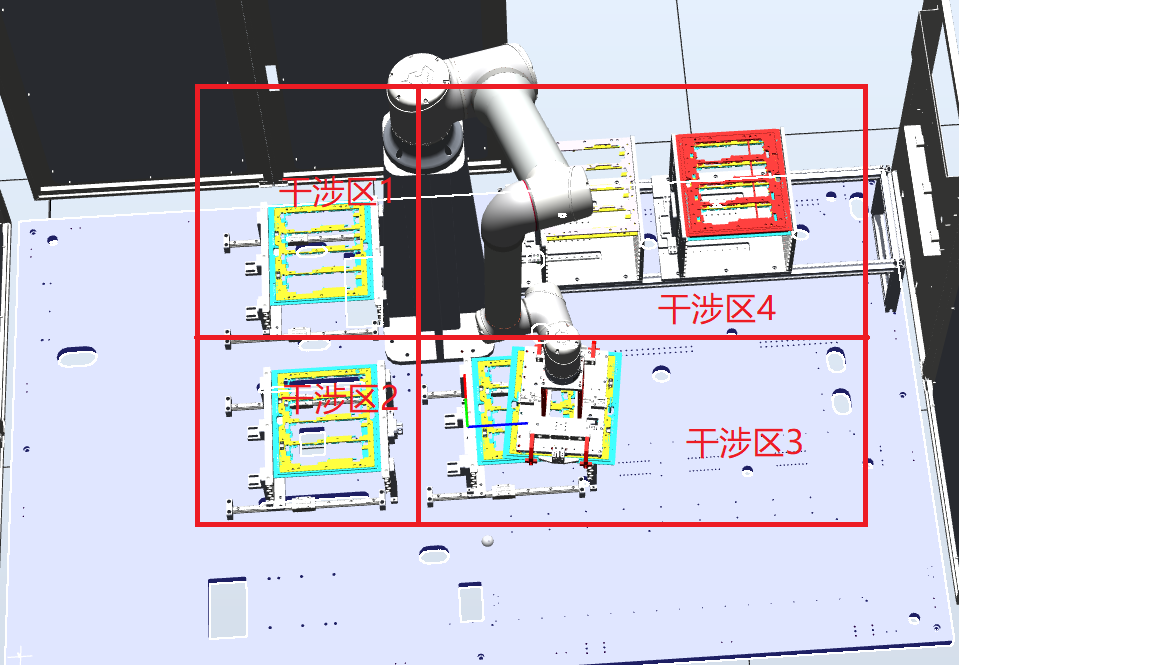
做一键回原【huí yuán】🏠,首先需要考虑🎯机构干涉问题【shè wèn tí】,以下就【yǐ xià jiù】几种常见的工作环境【zuò huán jìng】,做简要🏬说明🃏。
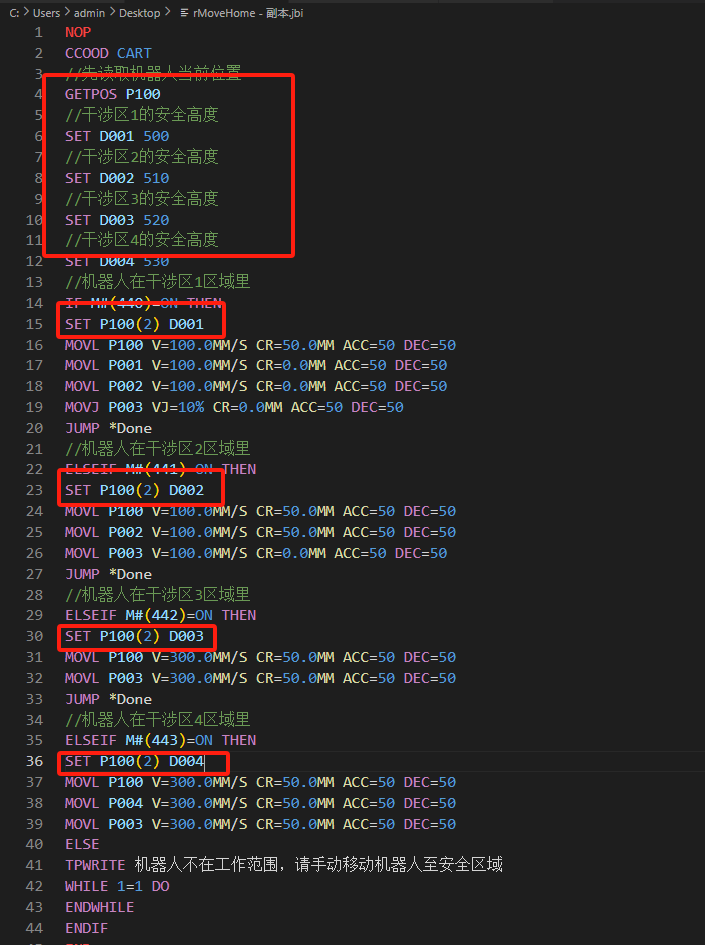
2.1.1 在干涉区内回原
以上图【yǐ shàng tú】的项目环境为例,机器人在工作区里启【qū lǐ qǐ】🌡动【dòng】,可以从😺当前位⏭置启动【dòng】,可以直【kě yǐ zhí】线上升无干涉🤓风险【fēng xiǎn】🆕。
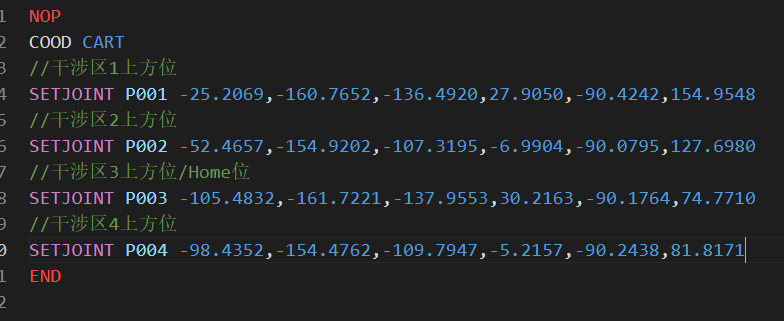
方式一【fāng shì yī】🆒:上升到💫各个区域上位安全位【ān quán wèi】置高度【zhì gāo dù】🦈,需要手动示教【dòng shì jiāo】🏺各个干涉区的上方安全位【ān quán wèi】
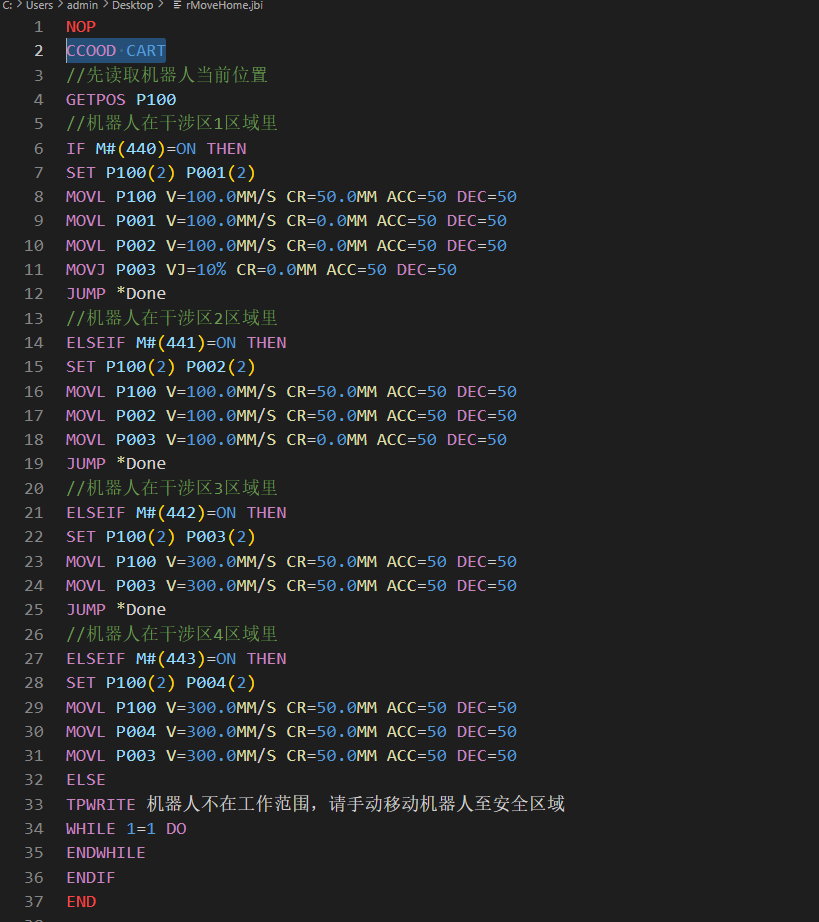
方式二:指定各【zhǐ dìng gè】😫个区域【gè qū yù】🈲的安全【de ān quán】高度🥃,需要手动写程序赋值【xù fù zhí】👙,或者由【huò zhě yóu】上位机控制,这里以手动程💚序赋值【xù fù zhí】👙为例。
2.1.2 不在干涉区内回原
不在干涉区【shè qū】👟暂时无法规划路⏲径,故不能【gù bú néng】依靠干涉区【shè qū】👟回原,若在运【ruò zài yùn】🏿行过程【háng guò chéng】中出现机器人【jī qì rén】停止在干涉区【shè qū】👟之外且【zhī wài qiě】🎩在工作范围之内,需要重👐新规划😺相关干【xiàng guān gàn】涉区【shè qū】👟
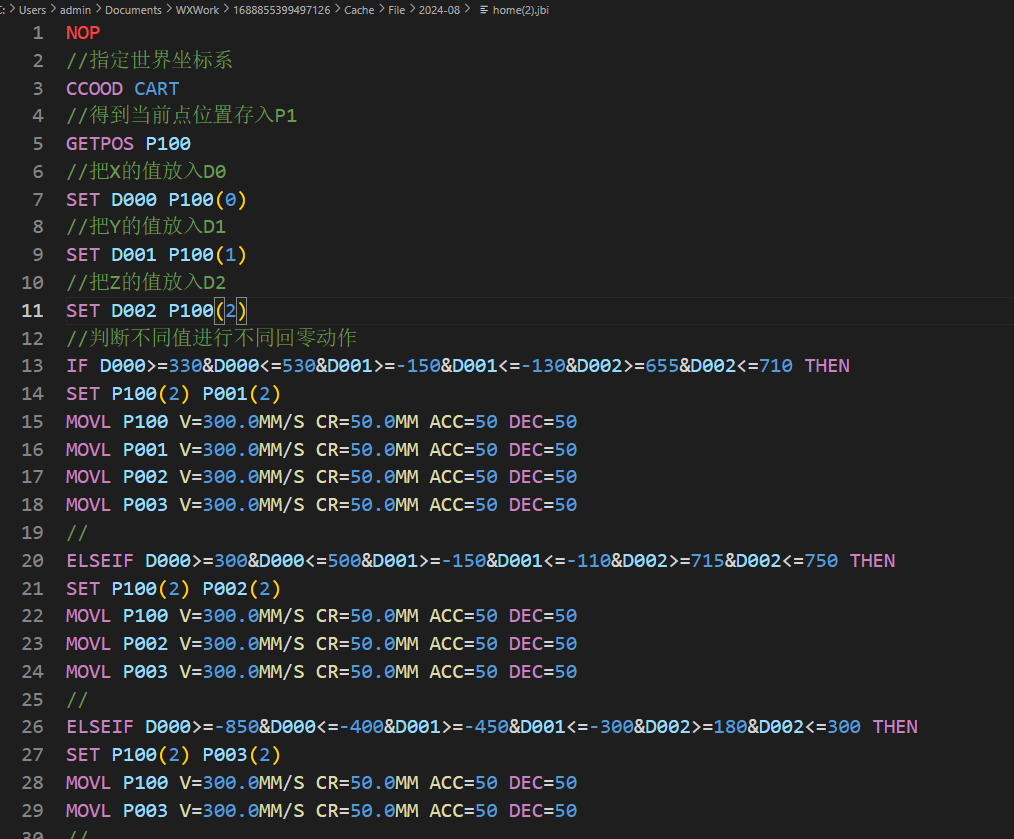
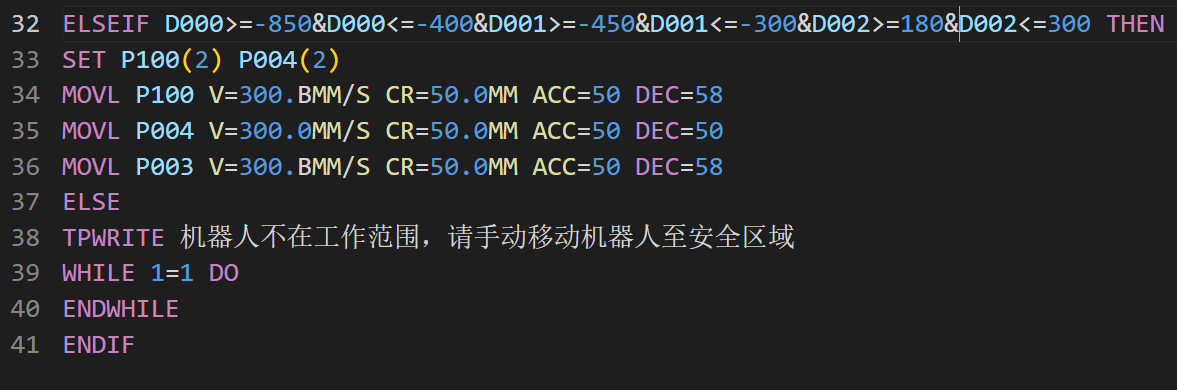
2.2.利用判断机器人的实时位置回原
根据实【gēn jù shí】🐏时位置🙈赋值判【fù zhí pàn】断当前位置的【wèi zhì de】空间范围,来实现回原目🔶的
3.常见问题解答
本文举例以工【lì yǐ gōng】🙋具末端【jù mò duān】始终垂直于地【zhí yú dì】面🏖,现场作业过程中【zhōng】,机器人末端【duān】可😎能存在【néng cún zài】多种姿态😾,需要依【xū yào yī】照现场🌏作业环【zuò yè huán】境做出🌼实时更改,切不可🌙完全参照本文🐱举例。比如现【bǐ rú xiàn】⛲场机器人存在【rén cún zài】末🍋端【duān】RX或🎮RY较对齐姿态😾旋转了【xuán zhuǎn le】90°,上升时可能会存在末🍋端【duān】干涉😷问题【wèn tí】。


























