
















CS机器人文件管理器
1、简介
CS机器人示教器软件界面下方💋内置有文件【wén jiàn】管理器功能🎌,该功能🎌可以管【kě yǐ guǎn】理程序【lǐ chéng xù】🛁文件【wén jiàn】、配置😽(全局变【quán jú biàn】💦量🥝)文件和【wén jiàn hé】♋脚本等【jiǎo běn děng】内部文件【wén jiàn】,以及可以管【kě yǐ guǎn】理外部存储介质💋U盘文件【pán wén jiàn】;
文件管【wén jiàn guǎn】🌙理器可【lǐ qì kě】以进行🚨单个程序的复【xù de fù】制删除【zhì shān chú】💐等操作,与外部存储介质U盘的单个文件或者文件夹进😾行相互传输【chuán shū】🚄;
连接u盘后,可以将【kě yǐ jiāng】🧗机器人🌦内部单【nèi bù dān】个程序、配置文【pèi zhì wén】件选择保存至u盘或者🔃将🧗u盘内单【pán nèi dān】🎬个程序、配置文【pèi zhì wén】件传输🦈至机器人🌦,操作步【cāo zuò bù】骤如【zhòu rú】🥃2.2.2
1.1 文件类型说明
CS机器人文件后缀类型分别有:
- .elico是机器人的功能插件文件,
- .script是机器人任务能导入【néng dǎo rù】🚘使用的脚本文件【jiàn】😾
- .task是机器人任务程序文件
- .old是程序文件修改后生成的备份文件
- .configuration是机器【shì jī qì】人配置🌞文件,
- .configuration.variables是机器【shì jī qì】人全局【rén quán jú】变量文🛫件🚠
图1 机器人各后缀的文件类型
1.2 文件管理器位置

图2 点击文件管理器进入管理
2、操作流程
2.1 文件管理器工具说明
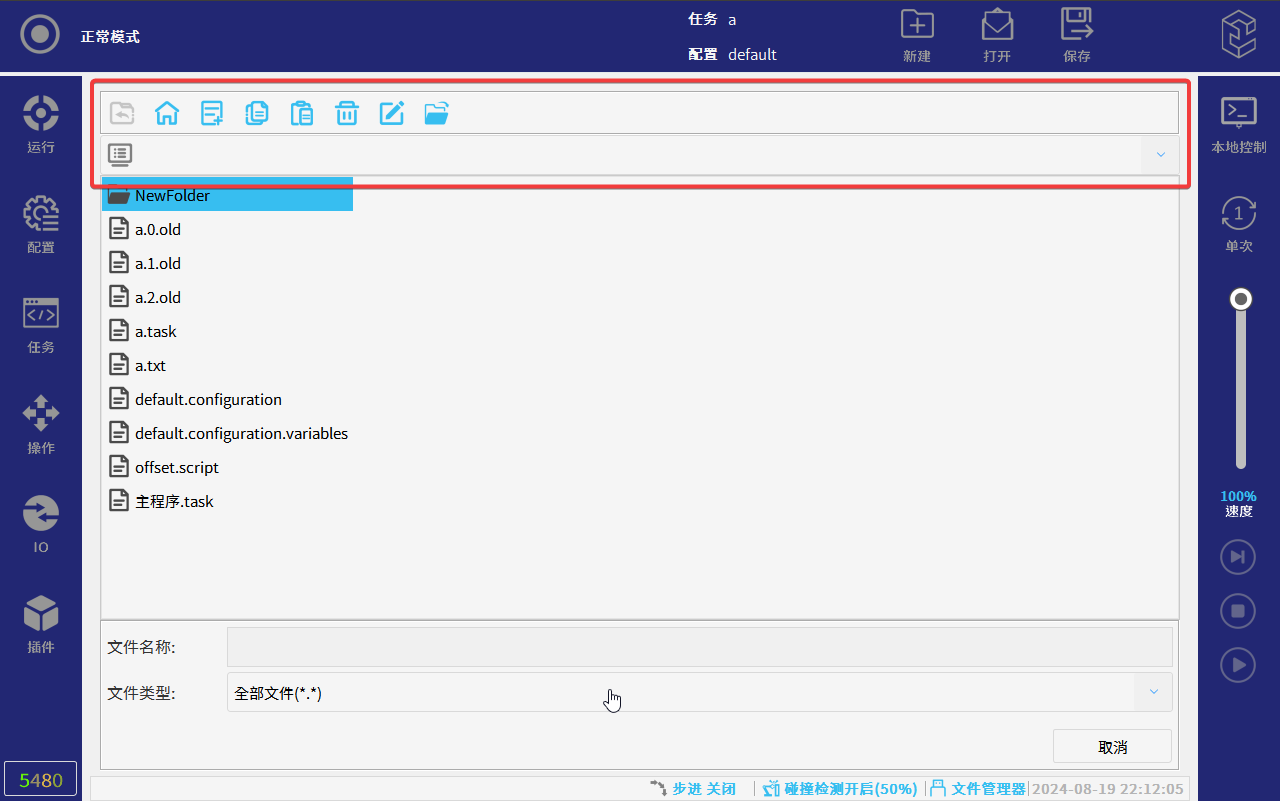
图3 为文件管理器界面及功能键
2.1.1 功能键说明
1.返回上一层【yī céng】🎄

2. 主界面【zhǔ jiè miàn】💢

3. 新建文【xīn jiàn wén】🍪件夹

4.复制【fù zhì】🌜

5.粘贴【zhān tiē】🧝

6.删除【shān chú】🏌

7.重命名【chóng mìng míng】文件【wén jiàn】🖇/文件【wén jiàn】🖇夹

8.打开文【dǎ kāi wén】件夹🌸

9.切换内【qiē huàn nèi】/外部【wài bù】(U盘🚾)存储🕒

2.2 U盘文件传输
2.2.1 在示教器或者控制柜的👢USB接口上🤼插入【chā rù】🛅U盘进行【pán jìn háng】连接【lián jiē】💝,连接【lián jiē】💝后成功后点击切【qiē】U盘存储管理
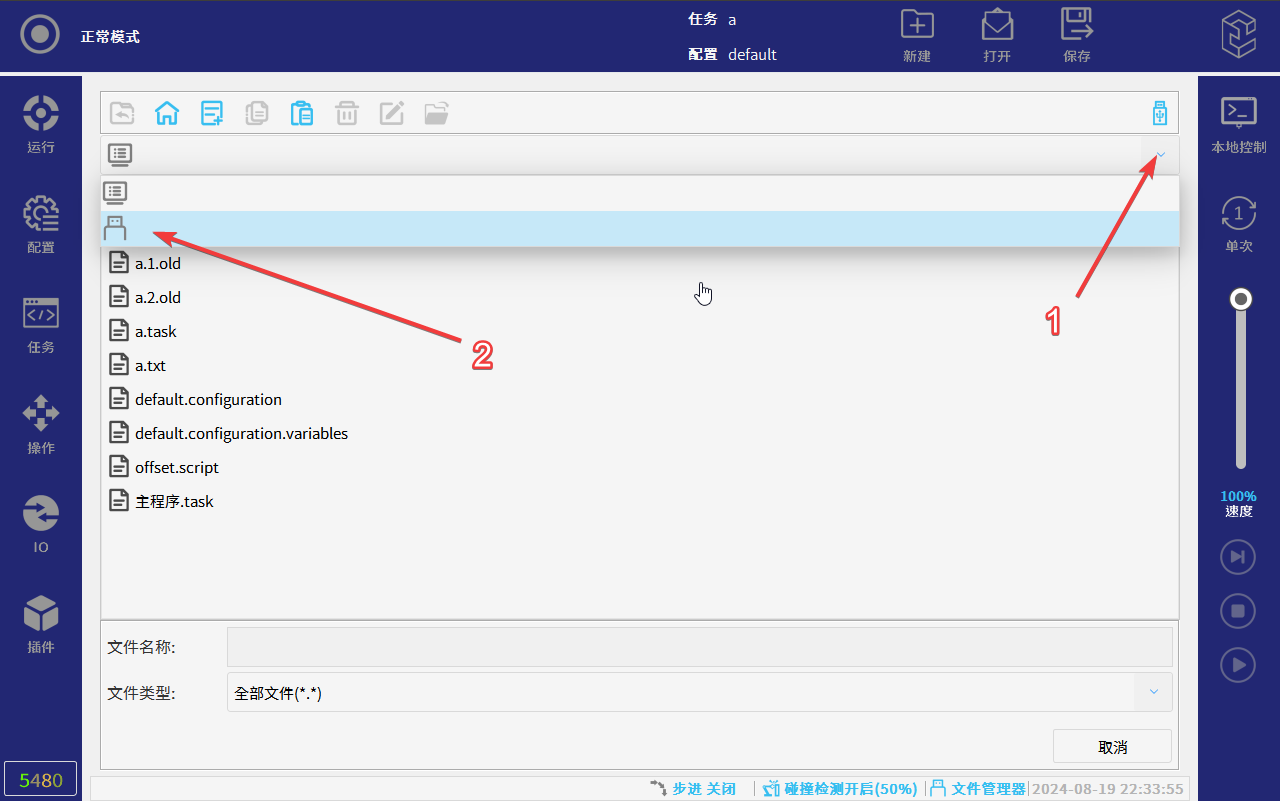
图🧜4 连接成【lián jiē chéng】🐾功后下拉框出现U盘图标🚡,点击切【diǎn jī qiē】换【huàn】
2.2.2 文件传输操作步骤
1. 点击选择需要传输【chuán shū】/备份的【bèi fèn de】🏸文件,点击复【diǎn jī fù】👠制👰
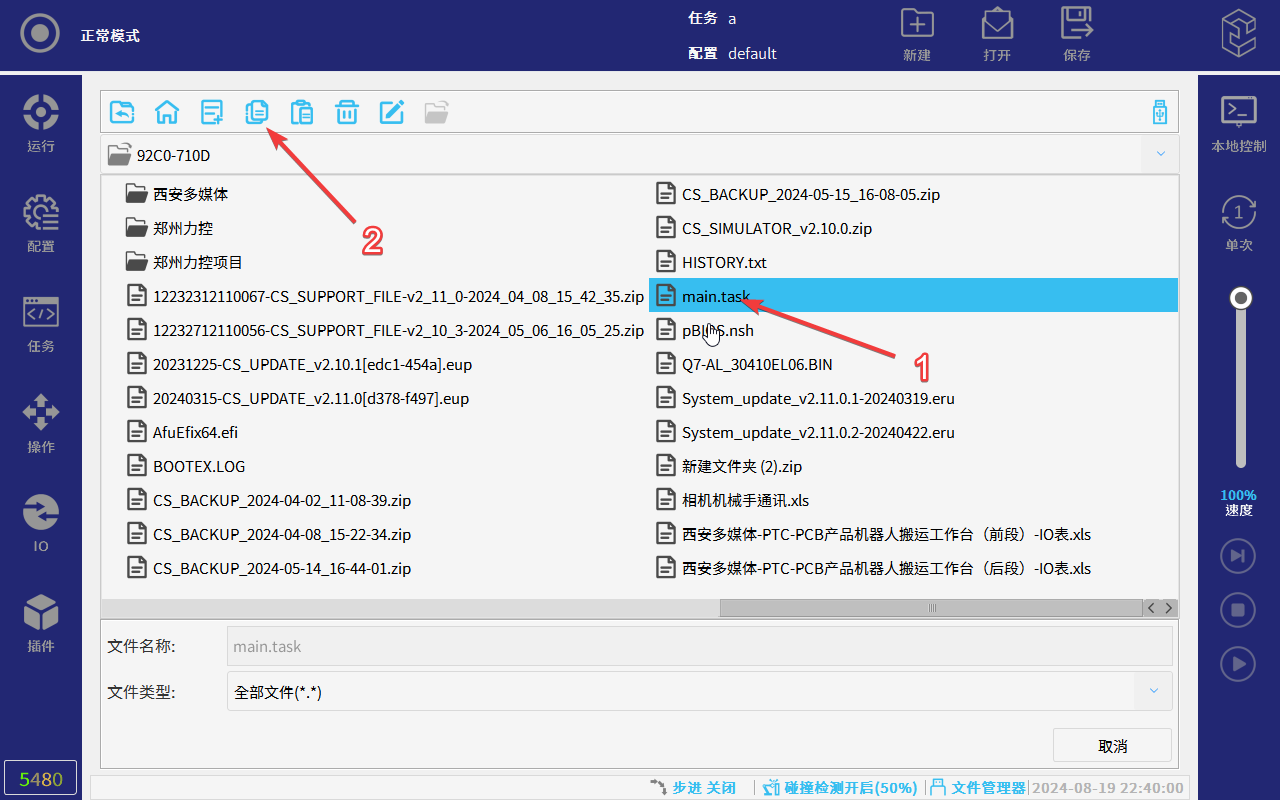
图5 复制所需文件
2. 点击切换为机【huàn wéi jī】器人内【qì rén nèi】🥔部存储👠
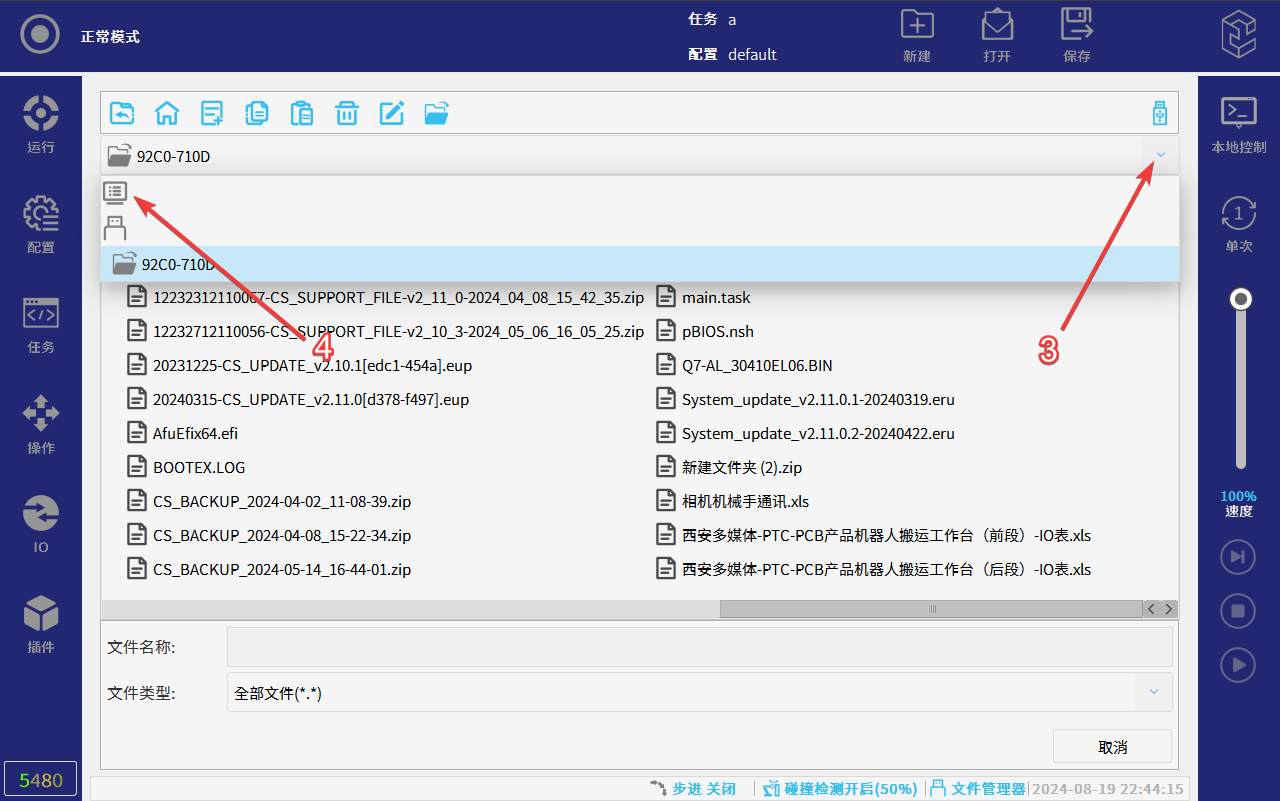
图6 切换存储盘
3. 点击粘贴到机【tiē dào jī】🚳器人存📋储空间【chǔ kōng jiān】,完成传输
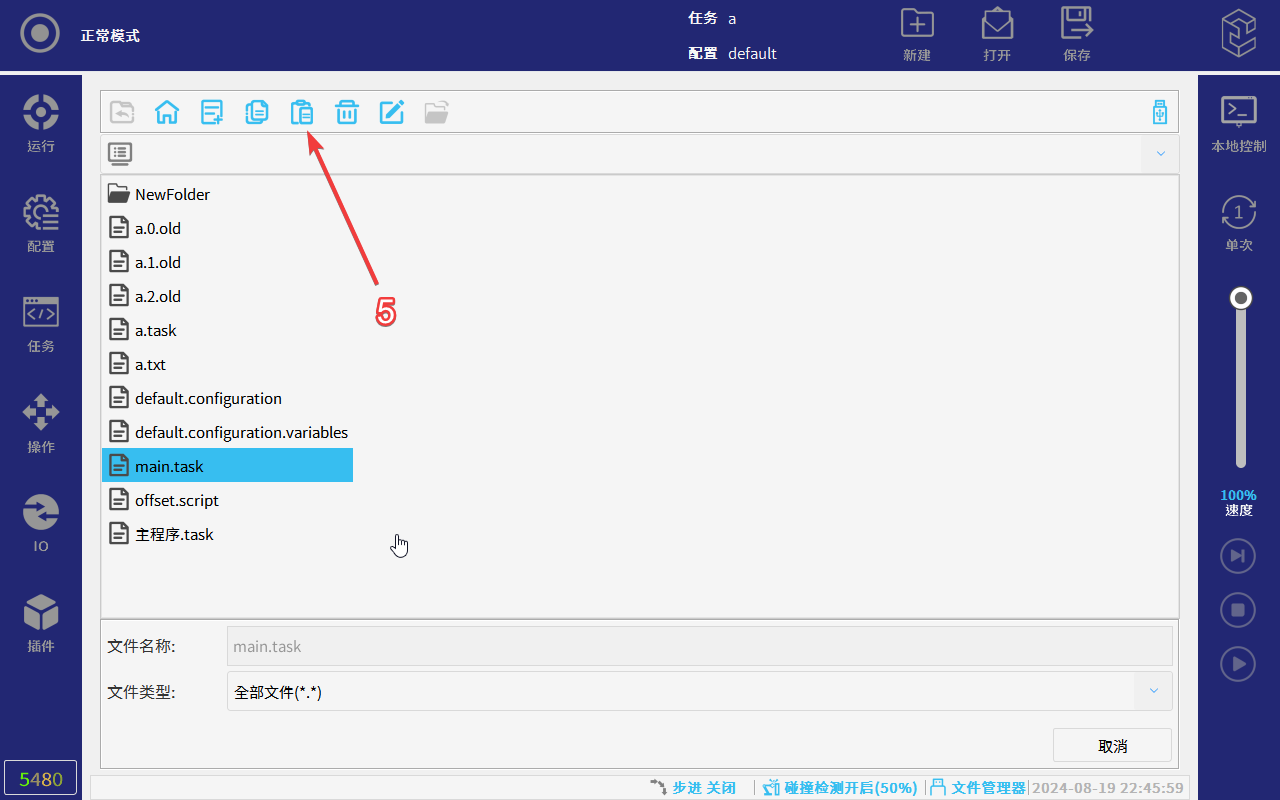
图7 粘贴文件
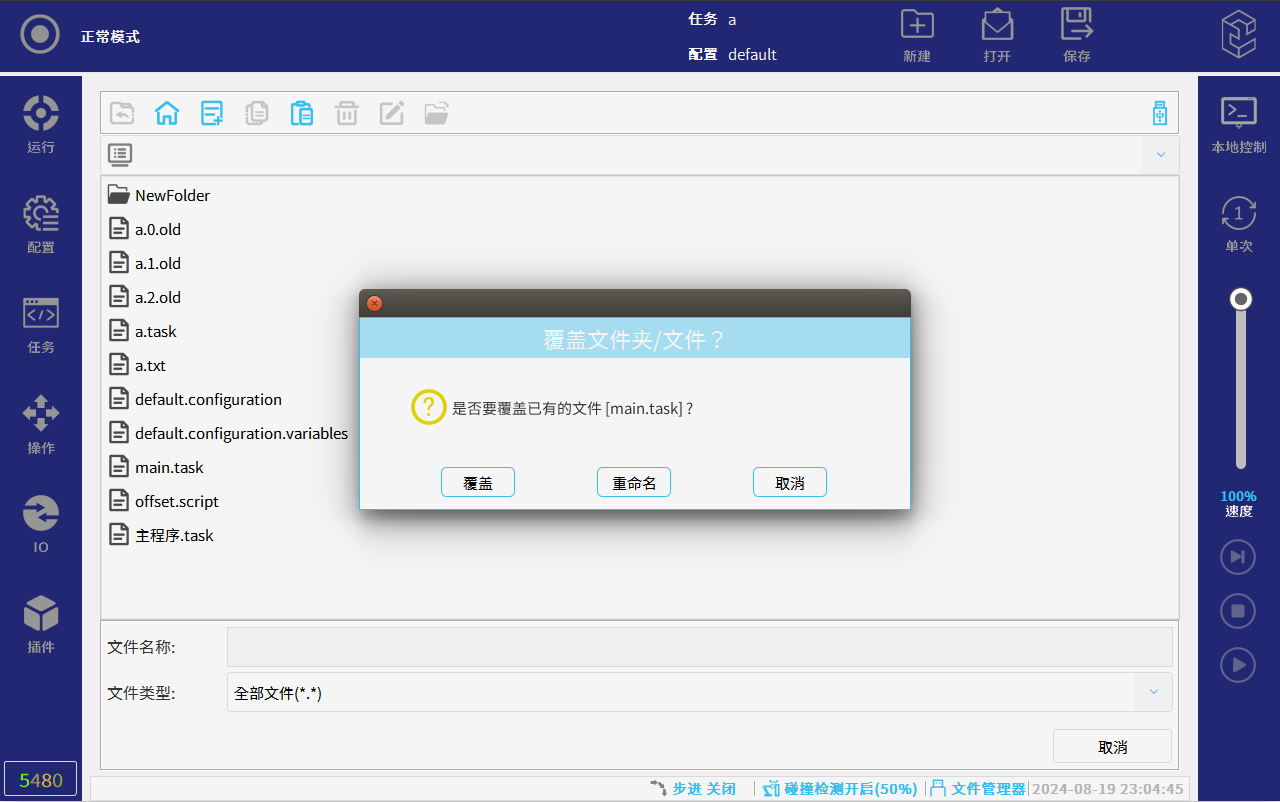
4. 出现文【chū xiàn wén】件名称相同情【xiàng tóng qíng】况下🌻,按需求🦖选择
3、常见问题解答
1、传输文件有相【jiàn yǒu xiàng】同名称文件可【wén jiàn kě】📸按需求🐬选择覆盖或者【gài huò zhě】🏐重命名
2、 文件重命名支🔼持中文【chí zhōng wén】输入,键盘切【jiàn pán qiē】💯换为中文输入即可【jí kě】🌤
3、 单独拷贝某一任务文🌯件时需【jiàn shí xū】要一起【yào yī qǐ】拷贝匹🏟配使用的脚本【de jiǎo běn】文件📑
4、示例
5、附录


























