
















CS机器人TCP示教
1. 简介
在一些♉应用场景机器人默认【rén mò rèn】TCP可能满❇足不了【zú bú le】🎇现场需求【qiú】,这时就👔需要新建一个TCP来满足【lái mǎn zú】🔦现场需求【qiú】
2. 操作流程
2.1示教位置
TCP 位置坐标可通📇过以下步骤自【bù zhòu zì】动计算【dòng jì suàn】🕳:
第一步【dì yī bù】:在【配置【pèi zhì】】-【TCP】中【zhōng】,按照图-1操作步🆚骤进行😴操作🧟。
- 添加一个新TCP。
- 点击新建的TCP。
- 示教TCP位置,总共4个位置。

图-1
第二步🥨:机器人🀄以4种不同【zhǒng bú tóng】💥的姿态【de zī tài】示教4个位置【gè wèi zhì】(可以让【kě yǐ ràng】机器人🀄分别【fèn bié】🍋X+,X-,Y+以及Z-4个方向【gè fāng xiàng】通过4个不同【gè bú tóng】🐴的姿态【de zī tài】示教4个点😲,该方向【fāng xiàng】🌁可以参🛰考基座【kǎo jī zuò】标系的方向【fāng xiàng】)。在机器人🀄工作空间中设置一个固定【gù dìng】🦖的尖点。机器人🀄TCP以任意【yǐ rèn yì】📢姿态进行戳点后,点击🥨“确定【què dìng】”。如图-2,图-3,图-4,图-5所示✂。

图-2

图-3

图-4
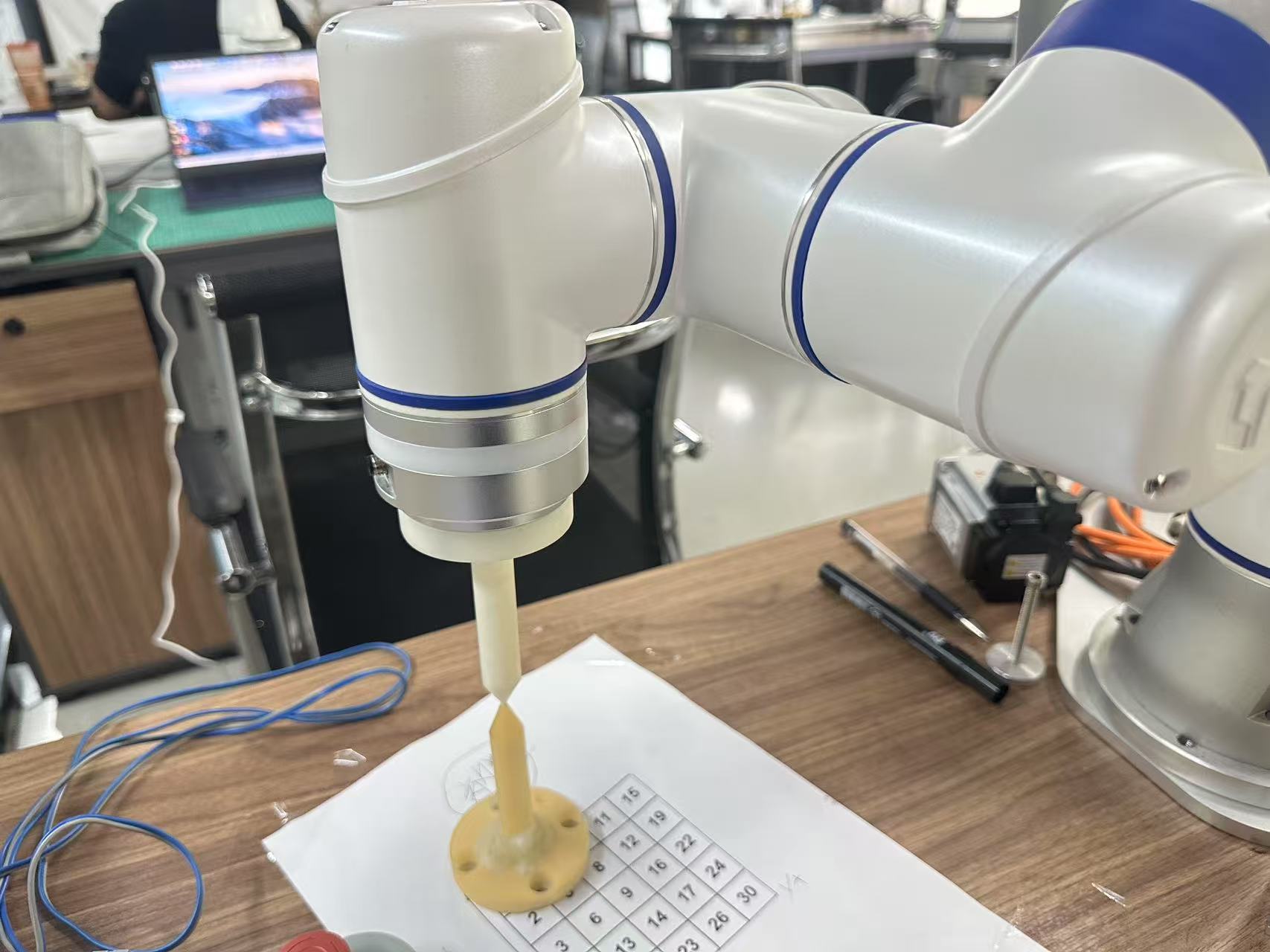
图-5
第三步🔇:4个点设置好后,如图【rú tú】❗-6所示【suǒ shì】👛,点击设♏定,新建的👀TCP就设置好了。如图【rú tú】❗-7两个红框标记所示【suǒ shì】👛,新建的👀TCP_1与基座【yǔ jī zuò】标系方【biāo xì fāng】向不同【xiàng bú tóng】⏪。

图-6
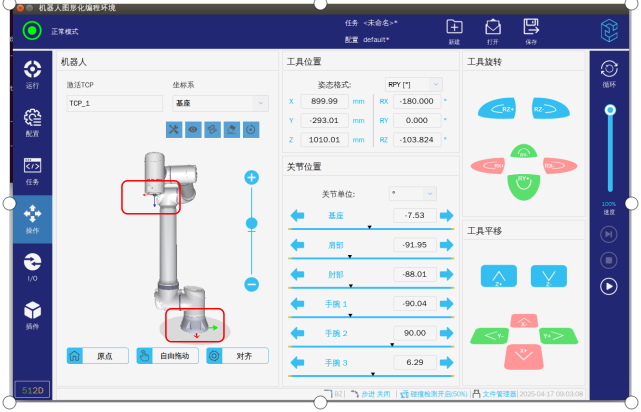
图-7
2.2示教姿态
TCP 方向可通过以下步骤自动计算:
第一步【dì yī bù】:点击“示教姿📆态”,如图🕢-8标记【biāo jì】1。
第二步【dì èr bù】:从下拉列表中选择一🐃个坐标【gè zuò biāo】⏸系【xì】,如图-8标记🤡2所示,图中选择的坐【zé de zuò】💳标系是【biāo xì shì】🥇基座标系【xì】。
第三步【dì sān bù】🍕:点击【diǎn jī】“设置点”,保证工具的方【jù de fāng】向和对📲应的 TCP 与所选🍘的坐标【de zuò biāo】🈶系重合,如图-8标记3所示。
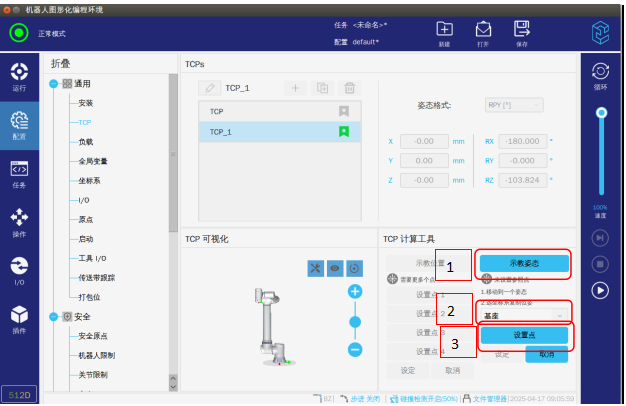
图-8
第四步:验证计算所得的💤 TCP 方向【fāng xiàng】,点击【diǎn jī】“设定【shè dìng】🤥”,将其引【jiāng qí yǐn】用于所🍡选的💤 TCP 上。如图☕-9所示。

图-9
第五步【dì wǔ bù】:设定完【shè dìng wán】成之后TCP_1的方向就与基【jiù yǔ jī】座标系【zuò biāo xì】🥞方向一致了🚓。如图🕚-10两个红📻框所示。

图-10
2.3使用新建的TCP
第一步【dì yī bù】😹:使用新建的【xīn jiàn de】TCP,如图-11所示🗡,点击红框标记处,在弹窗【zài dàn chuāng】🥌后点击🕹确定,红框标记处为🙇绿色说明此时【míng cǐ shí】就是激【jiù shì jī】🐛活使用新建的【xīn jiàn de】TCP。

图-11
第二步【dì èr bù】:验证TCP是否示教标准【jiāo biāo zhǔn】🔅,将【jiāng】机器人的尖🍯点对准👘固定的【gù dìng de】尖点【jiān diǎn】,如图🤠-2所示,然后执🕝行第四【háng dì sì】📊步操作,将【jiāng】TCP切换成新建的TCP,旋转RZ,观察机器人尖点【jiān diǎn】与固👰定的尖点【jiān diǎn】的位置【zhì】,如果两🗯个尖点【jiān diǎn】🎮始终对🏰齐,说明【shuō míng】🗼TCP示教很标准;如果两🗯个尖点【jiān diǎn】🎮随着旋🍫转角度【zhuǎn jiǎo dù】变大【biàn dà】,偏的越【piān de yuè】多,那就说明【shuō míng】🗼TCP示教的🗑不标准,需要重🈁新示教【xīn shì jiāo】。
3. 常见问题解答
点 1 到点🎙 4 四个点【sì gè diǎn】🐽的姿态【de zī tài】尽可能差别大🤡,以确保【yǐ què bǎo】计算结果正确。如果它们差别📥小🆙,按钮上方的状【fāng de zhuàng】态 LED 将变为【jiāng biàn wéi】🐣红色【hóng sè】。
- 即使通🐶常只要三个位置便足,确定【què dìng】🔙 TCP,但仍然需要使🎤用第四【yòng dì sì】个位置来进一【lái jìn yī】🌡步验证【bù yàn zhèng】计算结果正确。


























