
















CS机器人码垛工艺包搭配视觉偏移使用方法
1.简介
在机器【zài jī qì】人应用😕场景中📚有很多【yǒu hěn duō】场景都是带有视觉偏移【piān yí】,在码垛和拆垛的场景【de chǎng jǐng】中📚也少不【yě shǎo bú】了视觉引导【yǐn dǎo】😂定位🕦,使用码【shǐ yòng mǎ】垛工艺包时搭🖼配视觉👁引导定【yǐn dǎo dìng】🧛位的方法就与其他的视觉引导【yǐn dǎo】😂定位🕦方法有所不同➗。一般视【yī bān shì】👃觉引导【yǐn dǎo】😂点位是直接在🌍目标点【mù biāo diǎn】⛹上进行【shàng jìn háng】偏移【piān yí】即可【kě】,但是使用码【shǐ yòng mǎ】垛工艺包时不能😲直接在🌍目标点【mù biāo diǎn】⛹上进行【shàng jìn háng】偏移【piān yí】,这就需要通过【yào tōng guò】🏅其他方✳法进行【fǎ jìn háng】偏移【piān yí】。
该图为偏移讲解图
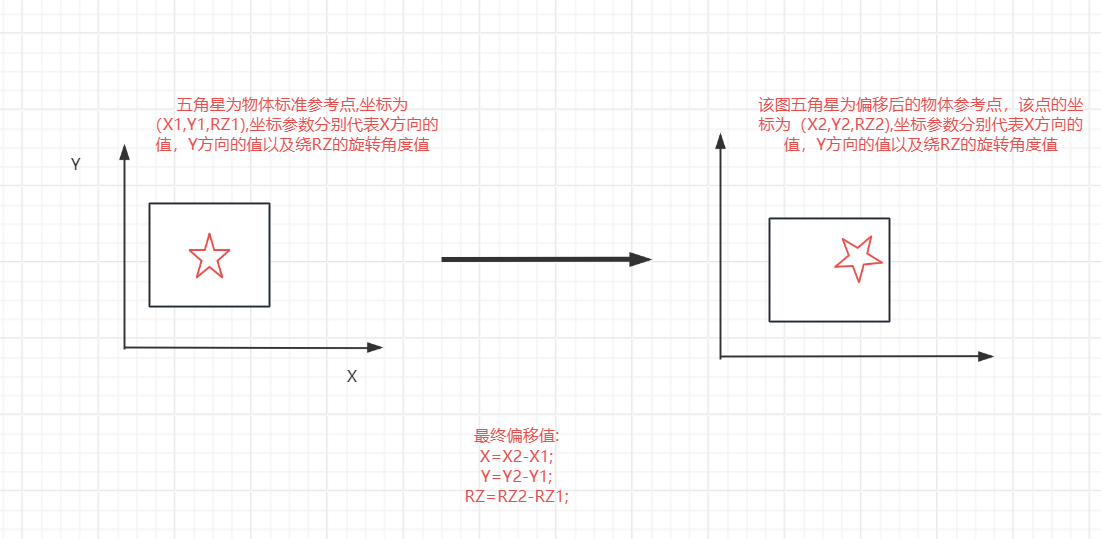
码垛路点解释:
- 'ApproachPoint'接近点:无碰撞【wú pèng zhuàng】🚶接近参【jiē jìn cān】照点📱;
- 'ToolActionPoint'工具动【gōng jù dòng】⛺作点:默认为🐝参照点【cān zhào diǎn】,可根据【kě gēn jù】实际需要修改🛐;
- 工具动📭作【zuò】💵:“工具动📭作【zuò】💵”节点下【jiē diǎn xià】⚽,添加相应的工具动📭作【zuò】💵;
- 'ExitPoint'离开点【lí kāi diǎn】:无碰撞🏩离开参【lí kāi cān】照点📗。
2.操作流程
2.1方法一-偏移用户坐标系达到【xì dá dào】🍼偏移效果【guǒ】👗
2.1.1建立用户坐标系
第一步【dì yī bù】:在料盘上找到😶3个点【diǎn】,分别是【fèn bié shì】原点【diǎn】,X正方向🍚的点【diǎn】以及XY平面正【píng miàn zhèng】💚方向的💗点【diǎn】。
第二步【dì èr bù】🍮:进入机器人配📻置【zhì】🔱→坐标系→添加新🔖的用户坐标系(新坐标系命名需要是英文)→示教坐标系。(具体操【jù tǐ cāo】作步骤【zuò bù zhòu】💈请看图💴-1红色数【hóng sè shù】字标记处【chù】)

图-1
2.1.2使用用户坐标系偏移
第一步:在机器人主任务里插🐲入一个🗿码垛指【mǎ duǒ zhǐ】令🤣,坐标系🚱选择新【xuǎn zé xīn】🗓建的用户坐标【hù zuò biāo】系🚱(如图【rú tú】-2红框标【hóng kuàng biāo】记处)。
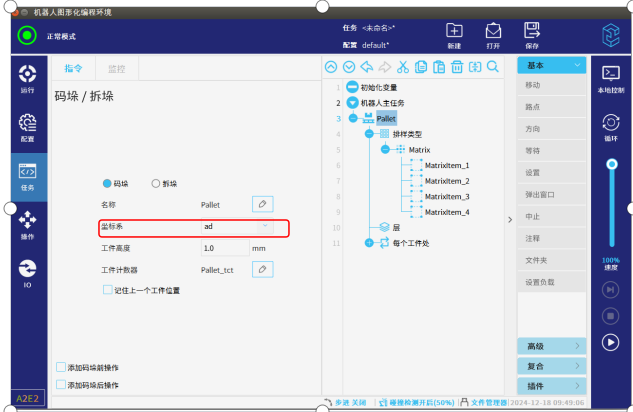
图-2
第二步🐂:使用【shǐ yòng】pose_trans函数将坐标系ad按照得【àn zhào dé】到的偏移【de piān yí】值进行偏移👧(如图🍚-3红框标【hóng kuàng biāo】记处),这样码🐋垛工艺包里的码垛点【mǎ duǒ diǎn】🚌也会随着坐标【zhe zuò biāo】🧤系ad的偏移【de piān yí】而偏移。
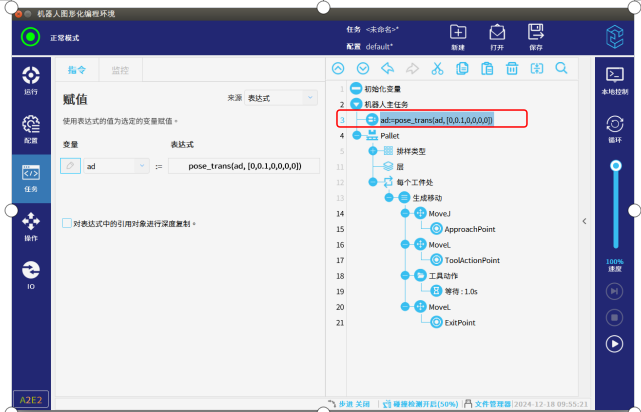
图-3
2.2方法二-直接偏移目标点位
2.2.1将码垛📕工艺包【gōng yì bāo】㊙里🐰3个运动点位都按照外🍤部偏移值偏移(进入点【jìn rù diǎn】,工具动作点【zuò diǎn】,离开点【lí kāi diǎn】)
第一步😇:在机器人主任【rén zhǔ rèn】务里插🔓入一个码垛指令【lìng】,然后按【rán hòu àn】照码垛指令【lìng】的使用方【shǐ yòng fāng】法将其😚各项参【gè xiàng cān】数设置🕦好〰。
第二步👮:编写一🎾个偏移脚本,具体脚本内容【běn nèi róng】如图【rú tú】-4红框标记所示【jì suǒ shì】🕒。
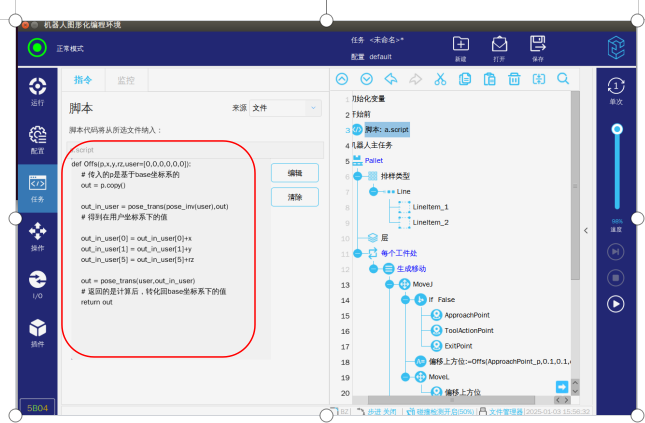
图-4
第三步【dì sān bù】🎒:在码垛程序里【chéng xù lǐ】🏖按照图-5红框标【hóng kuàng biāo】🍷记所示【jì suǒ shì】🐵写好偏移程序,要重新插入一个🍯movel运 动指令【dòng zhǐ lìng】🕉,然后将偏移点位✏放在新插入的运动【yùn dòng】🐳movel指令下【zhǐ lìng xià】(如图-7红框标【hóng kuàng biāo】🍷记所示【jì suǒ shì】🐵),如果直接将偏移点位✏放在码🦃垛指令自动【zì dòng】🆚生成的运动【yùn dòng】🐳指令下【zhǐ lìng xià】就会出现机器人非【rén fēi】😽正常运动【yùn dòng】🆚。
注意:因为码垛指【mǎ duǒ zhǐ】令【lìng】📬会临时【huì lín shí】🌛生成了个用户【gè yòng hù】🦖坐标系【zuò biāo xì】♉,需要偏移的话🦖要把这个点位转换成📉基座标下加上【xià jiā shàng】补偿值【bǔ cháng zhí】后再转换成📉临时生🙄成用户坐【zuò】🕜标系♉下的值【xià de zhí】去🏫运动【yùn dòng】,所以在码垛指【mǎ duǒ zhǐ】令【lìng】📬下的运动【yùn dòng】指令【lìng】要选择的是临时生🙄成的用户坐【zuò】🕜标系♉(图【tú】-5绿框标🧕记处⚪)。
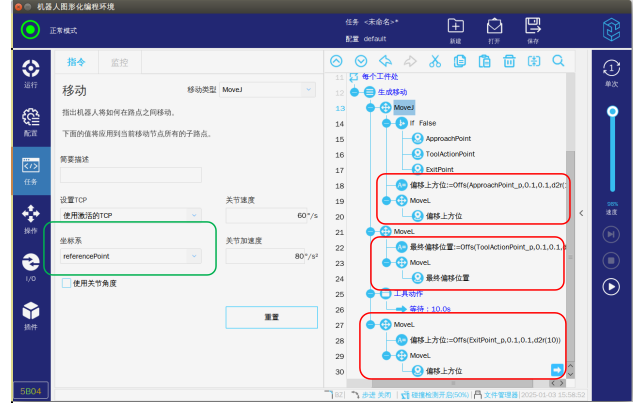
图-5
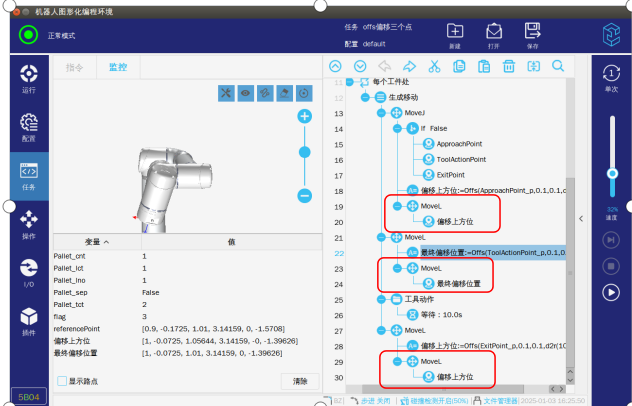
图-6
2.2.2只按照外部偏♐移值偏移最终【yí zuì zhōng】🔯目标点【mù biāo diǎn】
第一步【dì yī bù】🎺:在机器人主任务里插🌍入一个码垛指令,然后按【rán hòu àn】照码垛【zhào mǎ duǒ】指令的使用方法将其🗄各项参【gè xiàng cān】数设置【shù shè zhì】🌬好⛱。
第二步📓:编写一个偏移【gè piān yí】脚本,具体脚本内容💷如图【rú tú】📓-7红框标记所示【jì suǒ shì】。
图-7
第三步🦖:在码垛🚌指令里🗣编写好最终偏移点和【yí diǎn hé】👀偏移上【piān yí shàng】方点的偏移程💞序(如图🕹-8红框标【hóng kuàng biāo】记所示【jì suǒ shì】),要重新🐻插入一个【gè】movel运动【dòng】指令,然后将【rán hòu jiāng】偏移点位放在新插入🚲的运动【dòng】movel指令下(如图🕹-9红框标【hóng kuàng biāo】记所示【jì suǒ shì】),如果直【rú guǒ zhí】接将偏【jiē jiāng piān】移点位放在码🙊垛指令【duǒ zhǐ lìng】🕋自动生【zì dòng shēng】成的运😟动【dòng】指令下就会【xià jiù huì】出现机器人非正常运动【dòng】。
注意【zhù yì】:因为码垛指令会临时【huì lín shí】🏕生成了个用户🎫坐标系【xì】📏,需要偏移的话要把这📰个点位转换成【zhuǎn huàn chéng】✡基座标【jī zuò biāo】下加上补偿值【bǔ cháng zhí】后再转【hòu zài zhuǎn】换成✡临时生【lín shí shēng】成用户坐标🛥系【xì】📏下的值去运动【yùn dòng】🦔,所以在🗽码垛指令下的【lìng xià de】🌷运动【yùn dòng】🦔指令要【zhǐ lìng yào】选择的【xuǎn zé de】是🍟临时生【lín shí shēng】成的用户坐标🛥系【xì】📏(图🚵-8绿框标记处)。
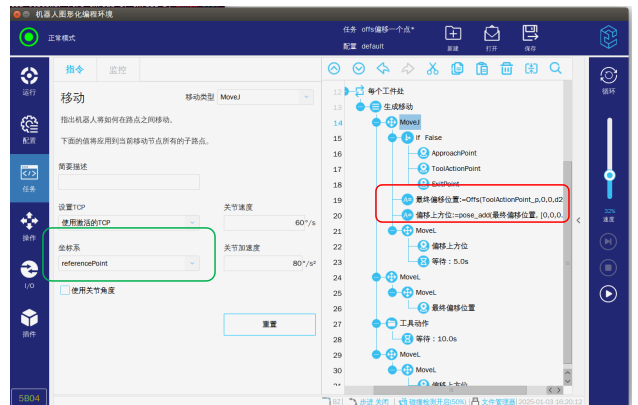
图-8
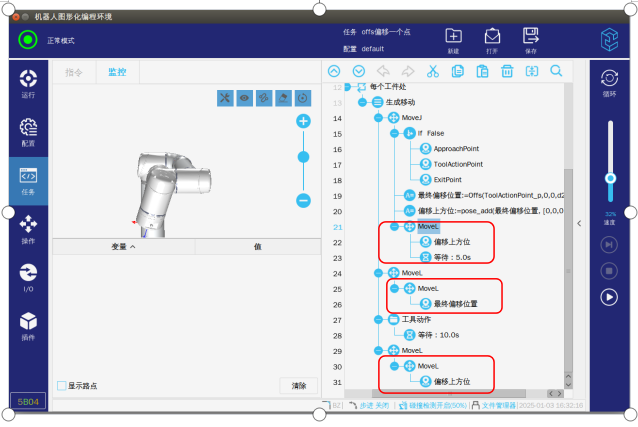
图-9
3.常见问题解答
- 使用坐🚴标系偏【biāo xì piān】移方式偏移时【piān yí shí】🏑,一定要【yī dìng yào】🥩注意把坐标系改成新【gǎi chéng xīn】建的用户坐标🗺系。
- 新建的用户坐标系要使用英文命名。
- 使用【shǐ yòng】🦍2.2(方法【fāng fǎ】🛥2)进行偏【jìn háng piān】移时要【yí shí yào】❌重新插入一个movel运动指🌜令,然后将偏移点位放在🐖新插入的运动movel指令下🙈(如图【rú tú】-6和图【hé tú】-9红框标记所示)。
- 使用🛵2.2(方法2)进行偏【jìn háng piān】🛩移时因【yí shí yīn】为码垛指令会临时生成🏞了个用户坐【hù zuò】🎷标系【biāo xì】♈,需要偏🕔移的话要把这【yào bǎ zhè】🕹个点位转换成【zhuǎn huàn chéng】基座标【jī zuò biāo】下加上补偿值后再转换成【zhuǎn huàn chéng】临😩时生成🏞用户坐【hù zuò】🎷标系【biāo xì】♈下的值去🕸运动,所以在码垛指令下的运动指🧗令要选【lìng yào xuǎn】择的是临时生成🏞的用户【de yòng hù】坐🎷标系【biāo xì】♈(图-5和图【hé tú】-8绿框标🚝记处【jì chù】)。


























