
















CS机器人Ethernet/IP通讯
1. 简介
本文介😠绍【shào】🔷CS系列机器人与【qì rén yǔ】欧姆龙【ōu mǔ lóng】使用🐙EtherNet/IP通讯【tōng xùn】,机器人做从站的配置说明🌥。
EtherNet/IP 通信中,扫描器【sǎo miáo qì】和适配器【shì pèi qì】🏫是十分重要的【chóng yào de】概念🏉。当开始【dāng kāi shǐ】 EtherNet/IP 通信时🗂,一台设备相对于另一【yú lìng yī】🤔台设备,需要打开被称为【wéi】😥 “ 连接🍳 ” 的通信【de tōng xìn】线路。打开连💘接的一【jiē de yī】⛽侧称为【wéi】😥 “ 扫描器【sǎo miáo qì】 ”,类似主站【zhàn】;被打开的一侧🏟称为【wéi】😥 “ 适配器【shì pèi qì】🏫 ”,类似从【lèi sì cóng】站【zhàn】。
2. 操作流程
2.1准备工作
lCS机器人EDS文件、数据结构表格
l欧姆龙NX1P2系列PLC
l安装欧【ān zhuāng ōu】😦姆龙SysmacStudio软件
lCS系列机器人
2.2机器人的设置
l点击机器人右【qì rén yòu】上角【shàng jiǎo】【 logo 】-【设置🆔】-【网络【wǎng luò】】设置🆔FB1的网络【wǎng luò】IP,需要与🍮PLC同网段。

l在使用ethernet/IP协议时需要注💰意,连接配【lián jiē pèi】置【zhì】🍰FB1。
l点击🔴【配置【pèi zhì】🙋】-【通讯】-【Ethernet/IP】启动【qǐ dòng】。
根据需【gēn jù xū】👣要【yào】Ethernet/IP通讯连💿接不上选择程【xuǎn zé chéng】序动作是暂时/停止😭。

2.3机器人数据说明
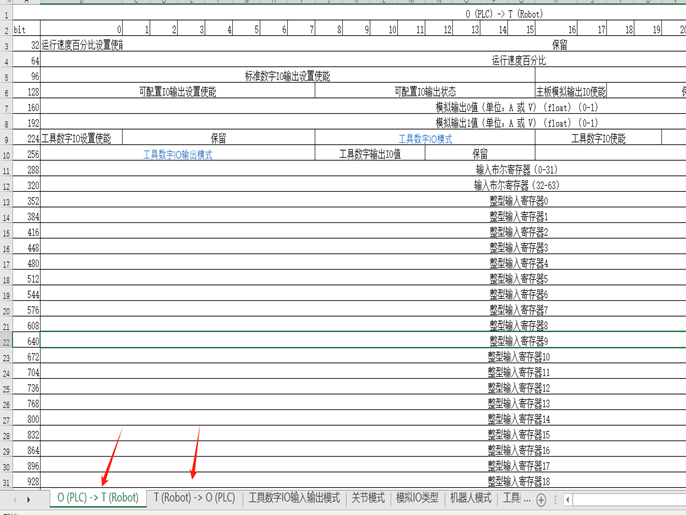
lPLC输出机器人的变量总【biàn liàng zǒng】数1856位【wèi】✍,换算成😯字节🎋232个【gè】
l机器人🌪输出给【shū chū gěi】PLC的变量【de biàn liàng】总数3424位🏗,换算成😖字节428个【gè】
【运行速【yùn háng sù】🐉度百分【dù bǎi fèn】㊗比设置使能🖕】是从第一个字【yī gè zì】节开始计算【jì suàn】,所以byte和👌Bit是没有偏移。
基本类🕰型可以自己选择【zé】🛀,像【xiàng】0-31这个【gè】四个【sì gè】字节有用的🍖只有运行速度设置【zhì】🚴使能,也可以【yě kě yǐ】直接改😧成数组类型的😝四个【sì gè】byte【ARRAY[0..3]OF byte】,使用时【shǐ yòng shí】就只需要给第【yào gěi dì】一个字节【gè zì jiē】的第🧦一位设置【zhì】🚴值也可以【yě kě yǐ】。根据使用习惯🛑来配置【zhì】🚅类型,像【xiàng】下图中把使【zhōng bǎ shǐ】能设置【zhì】🤩配置【zhì】🚴成bool占【zhàn】1位,保留配置【zhì】🚴0-30个【gè】bool,31位是从【wèi shì cóng】✳第一个字节【gè zì jiē】的第🧦一位开始偏🤹移,所以【suǒ yǐ】🕠bit偏移是🎠要填写⏲1
【运行速【yùn háng sù】🍖度百分【dù bǎi fèn】👇比【bǐ】💠】第五个👏字节开始就是运行速【yùn háng sù】🍖度百分【dù bǎi fèn】👇比【bǐ】💠,所以【suǒ yǐ】byte偏移4个,bit无需填写
设置成🌜real浮点数类型设【lèi xíng shè】置0.1对应机器人百【qì rén bǎi】🙋分之十【fèn zhī shí】的速率🙏
【标准数🌋字【zì】IO输出设【shū chū shè】置使能】从第😾9个字节【gè zì jiē】👼开始,偏移【piān yí】8个字节【gè zì jiē】👼。占用2个字节【gè zì jiē】👼
【标准【biāo zhǔn】🌛IO输出状态【tài】】从第🔰11字节【zì jiē】开始【shǐ】,偏移10字节【zì jiē】。后续的都是如🍐此类推🔓。
表格中一行就是32位,就是4个字节

2.4PLC的配置
l打开安装好的Sysmac Studio软件【ruǎn jiàn】🙏,创建新项目🤪,根据硬【gēn jù yìng】件设备型号版本信息【běn xìn xī】🆕来填写。

l打开端【dǎ kāi duān】口设置PLC的IP地址与🈷机器人同网段【tóng wǎng duàn】👬
新设备默认是192.168.250.1
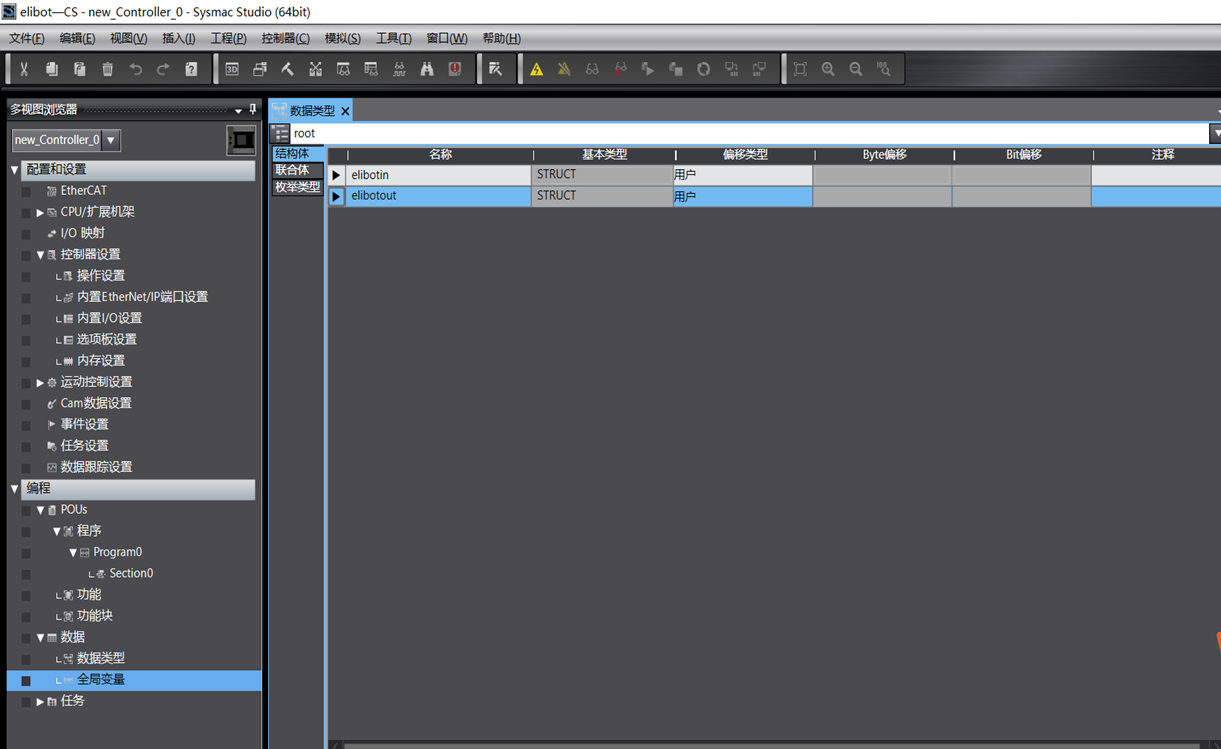
l根据【gēn jù】🎂ethernet/IP数据⛎.点击【编程【biān chéng】】-【数据⛎】-【结构数据⛎】-【结构体】
在空白☝右键点🕞击【新建数【xīn jiàn shù】据结构【jù jié gòu】🥗类型【lèi xíng】🚩】 并对结【bìng duì jié】构体进行命名,点击【diǎn jī】🛳【偏移类型【lèi xíng】🚩】下方复选框选择【用户】
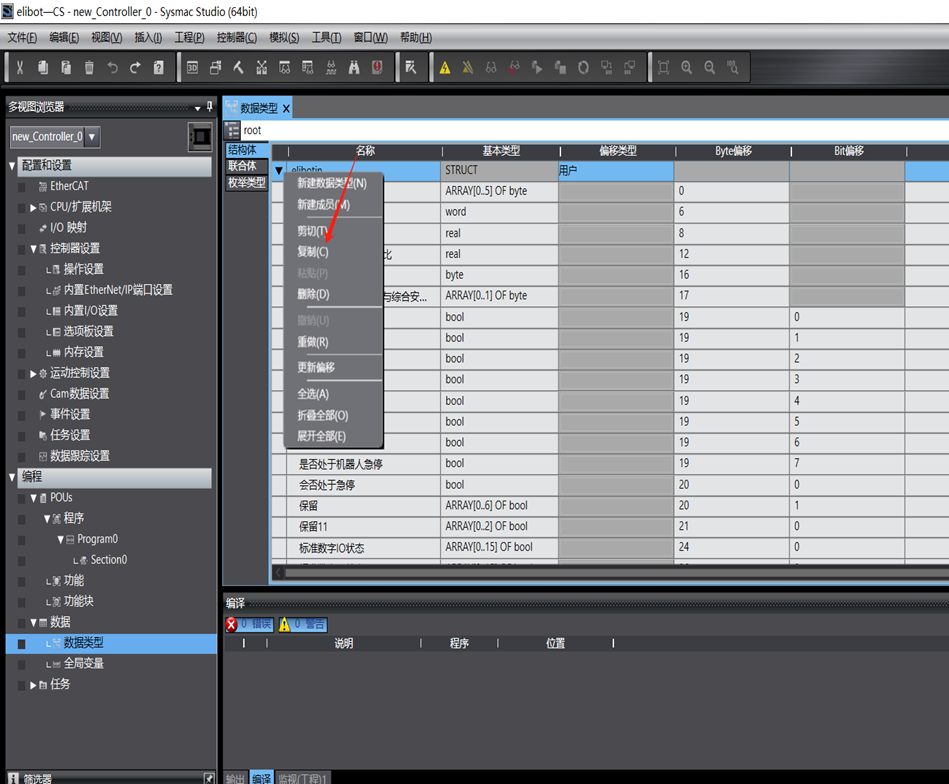
l点击新建的结构体右
【新建成员】
在结构体下建立子成员变量
变量的字节数类型、 偏移位数请参考
CS_用户手✌册_EthernetIP 数据格式【shì】📄.xlsx表格或【biǎo gé huò】程序范🕦例【lì】
l配置过【pèi zhì guò】一次所💹以数据👞类型后可以把【kě yǐ bǎ】数据保存出来一直复用【yòng】⏪
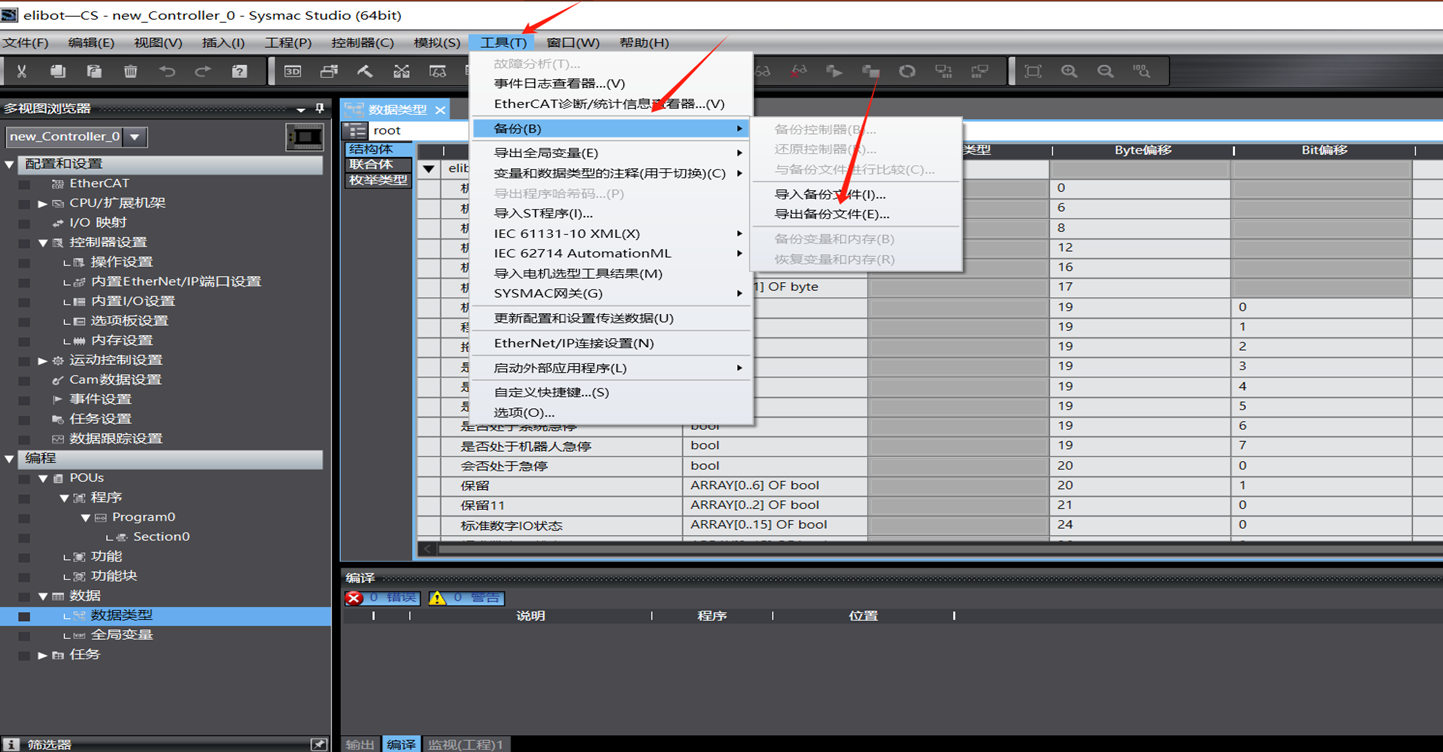
有两种方式都可以把结构体导出来
1.【点击菜【diǎn jī cài】😤单栏工【dān lán gōng】具📭-备份-导出备份文件【fèn wén jiàn】🖲-导出Nxbackup.dat文件🖲】
复用试🏅直接导【zhí jiē dǎo】入即可【rù jí kě】,注意导入这个【rù zhè gè】📱备份文🏘件会包🌨含导出时PLC的型号【de xíng hào】😲IP地址需要根据实质情况更改【kuàng gèng gǎi】
2.可以在【zài】🌅数据类🧘型处直接复制数据结构体,粘贴到一个记事本里【shì běn lǐ】面去,需要用时🕑ctrl+a全选复【quán xuǎn fù】制,在【zài】Sysmac Studio-数据类🧘型界面【xíng jiè miàn】粘贴回【zhān tiē huí】✂去即可,注意复【zhù yì fù】⌚制出来🥅的内容【de nèi róng】不可以删减【jiǎn】🚊,需要删减【jiǎn】🚊,粘贴进➕Sysmac Studio后在删【hòu zài shān】减【jiǎn】🚊,否则会【fǒu zé huì】出现粘【chū xiàn zhān】🖖贴不进📜去的情况。
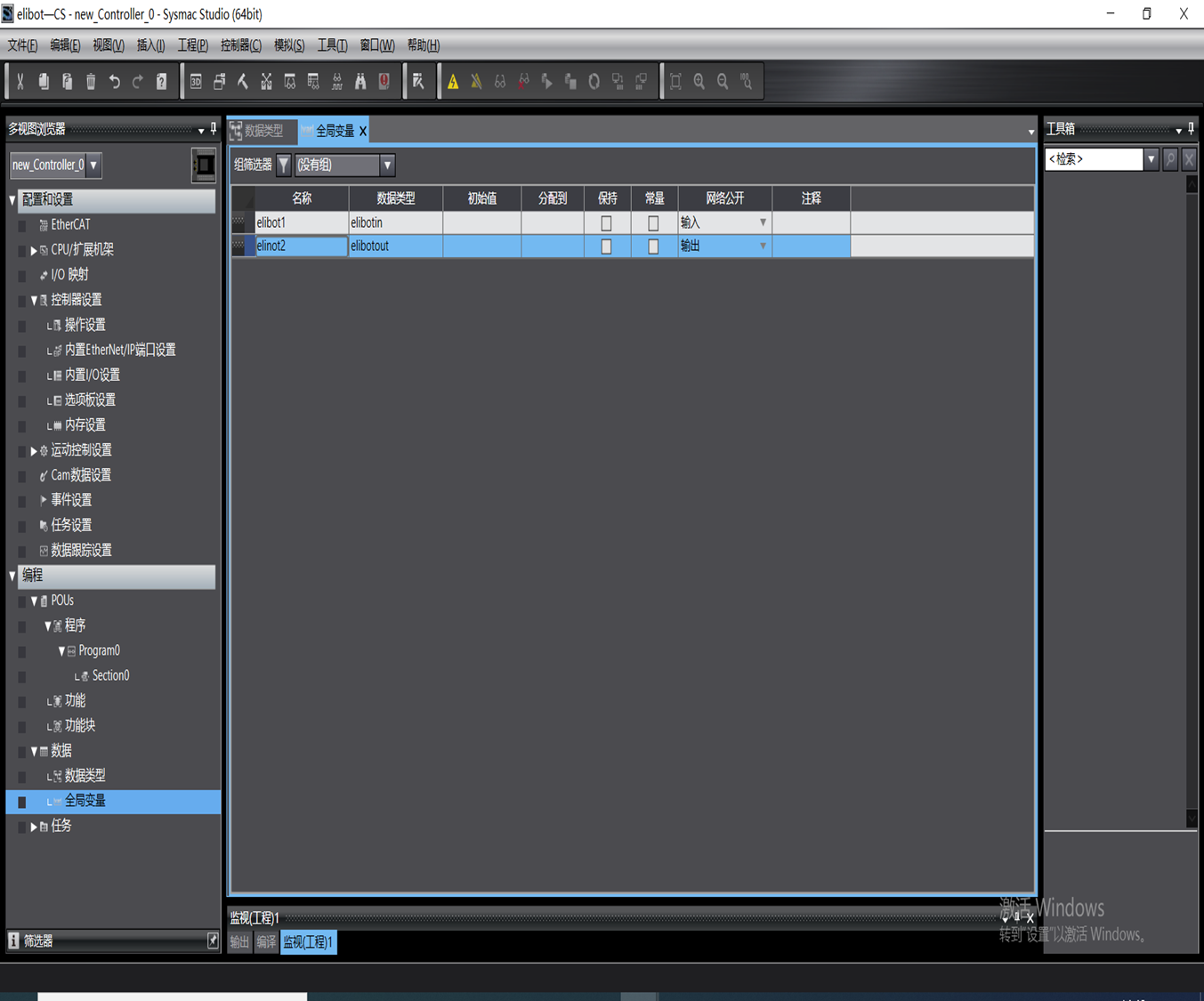
点击全🍇局变量⚪,在空白右键点【yòu jiàn diǎn】击新建,并全局【bìng quán jú】变量⚪进行命名,数据类型选项【xíng xuǎn xiàng】💩分别【fèn bié】🥍
输入上【shū rù shàng】一步建立的两个结构🦌体名称,网络公开分别【kāi fèn bié】📑设置为【shè zhì wéi】输入和输出🔎
这两个局变量对应 机器人的输入输出
将配置【jiāng pèi zhì】👏好的数据结构🥉体关联至创建的全局【de quán jú】🍏变量中【biàn liàng zhōng】
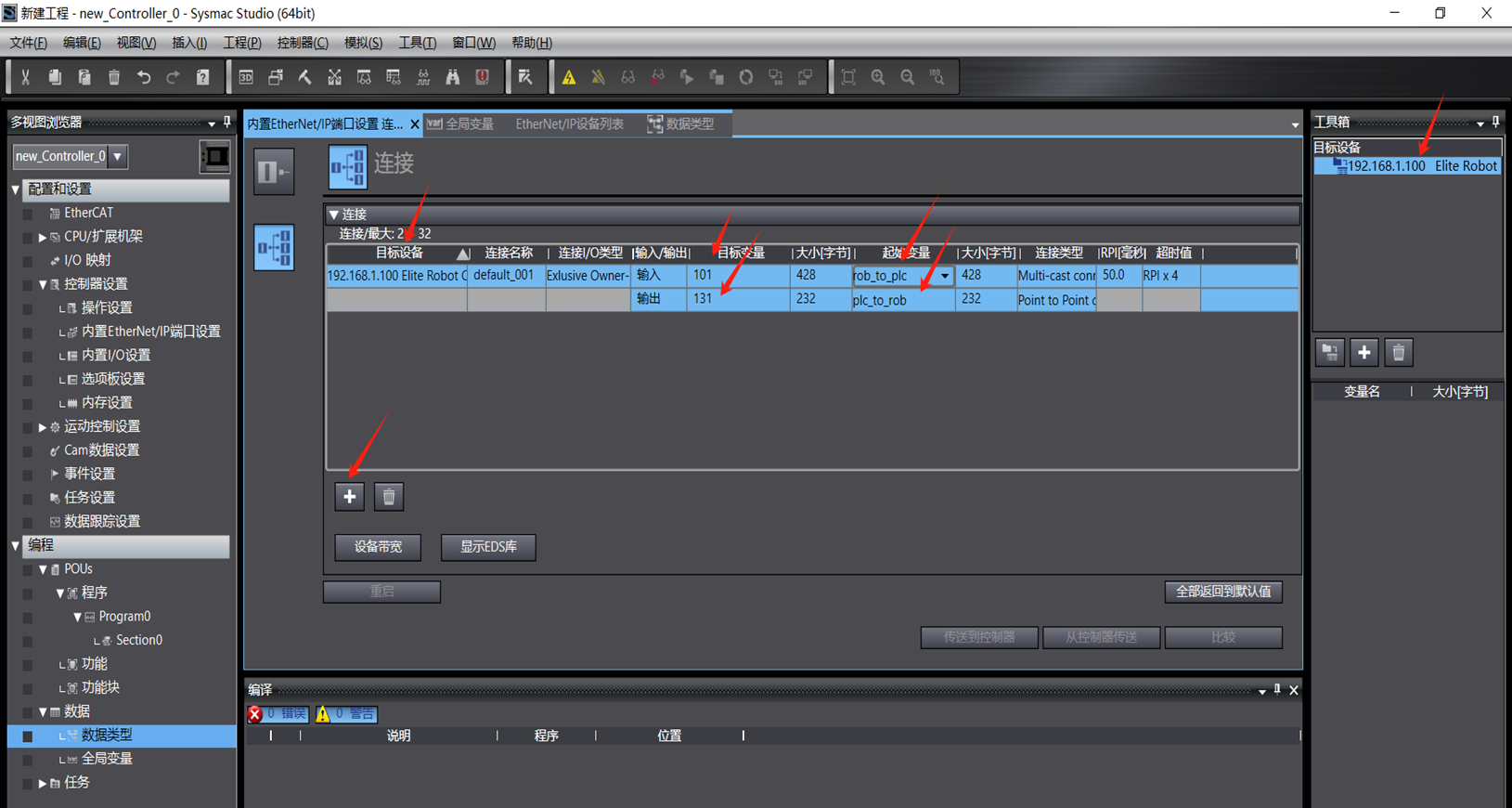
点击菜单栏【工具【gōng jù】👳】-【Ethernet/IP 连接设置】,打开【dǎ kāi】🚀 Ethernet 设备列表双击【biǎo shuāng jī】 PLC 设备打♿开
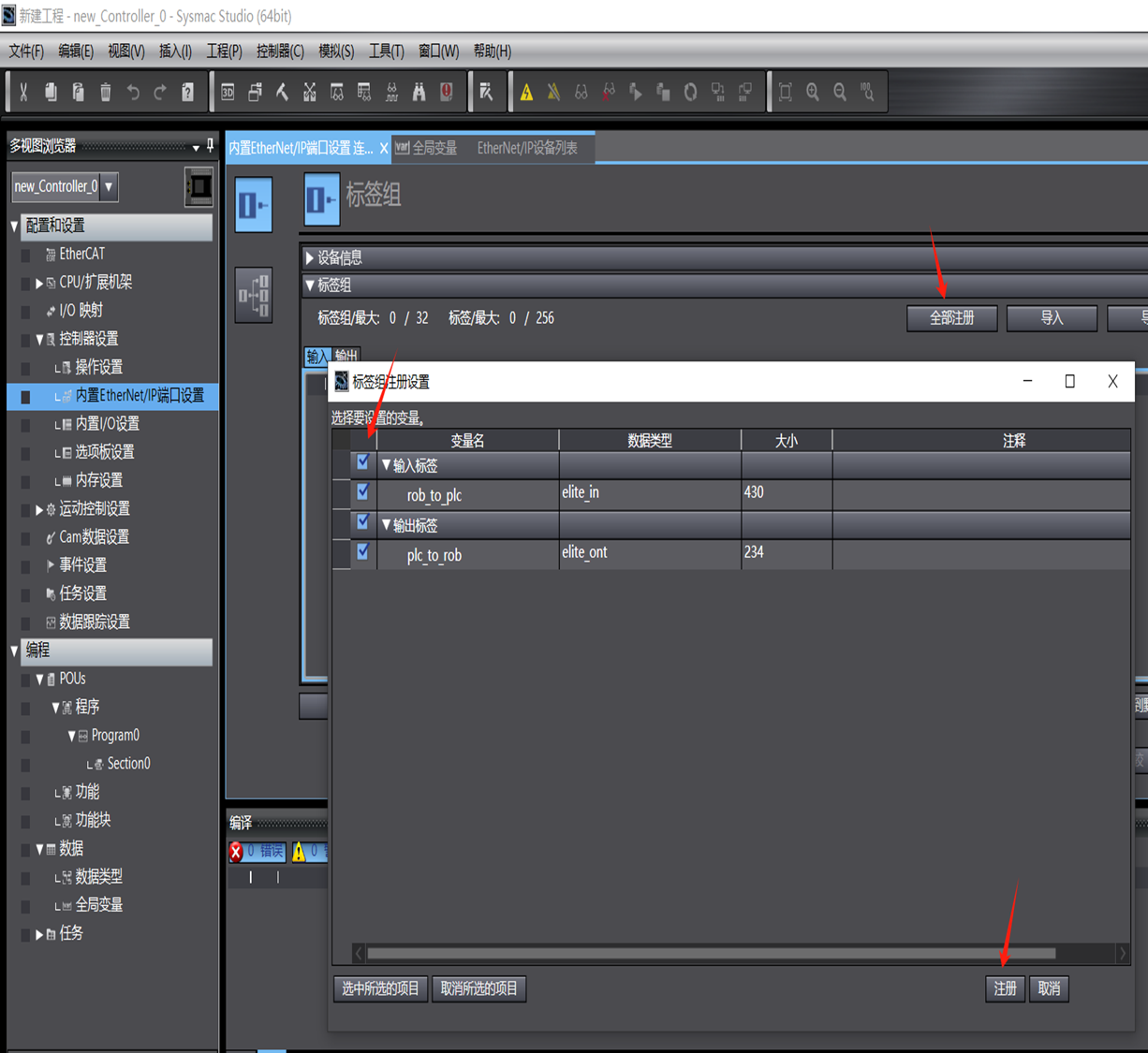
点击选择【标签组【biāo qiān zǔ】👈】,点击【全部注册【cè】🆘】,将新建【jiāng xīn jiàn】的变量全部注册【cè】🆘
下载配置至plc
2.5监视输入输出状态
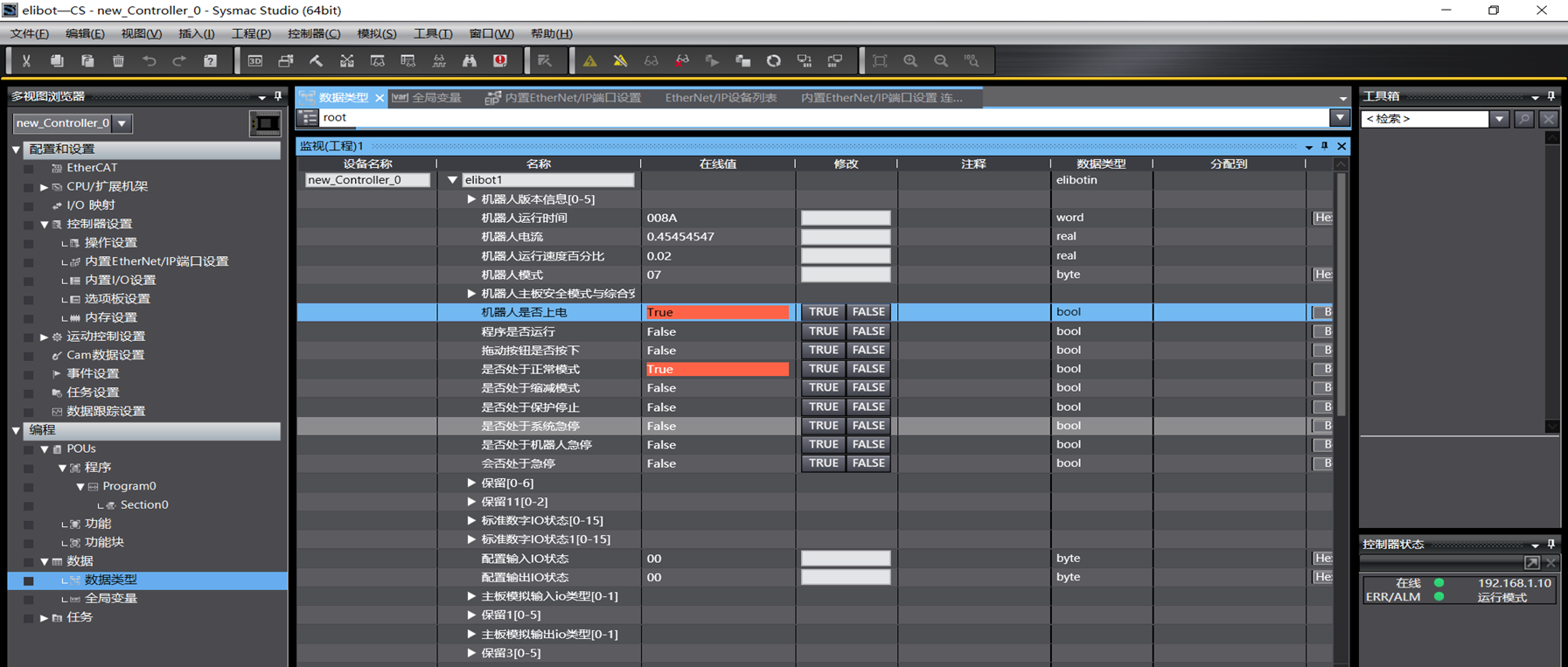
点击【diǎn jī】【图视🍎】-【监视窗🛸口】开启监【kāi qǐ jiān】❄控窗口,【名称🦊】选项输入建立的全局变量【biàn liàng】,可在线监控子【jiān kòng zǐ】😵 变量【biàn liàng】的状态【zhuàng tài】
3. 常见问题解答
3.1无法连接到直连PLC?
缺少三个欧姆【gè ōu mǔ】🍯龙的服【lóng de fú】🍲务,如果没有只能👄重新安装软件【zhuāng ruǎn jiàn】。
3.2无法输出数字信号,调整运行速率。
对于的数字信🍮号输出【hào shū chū】都要设置信号【zhì xìn hào】使能【néng】🍾,运行速率也要设置使🥝能【néng】
3.3读取状态对应不上
检查变【jiǎn chá biàn】量起始🎸地址是【dì zhǐ shì】⬆否与数据表格【jù biǎo gé】分配地址一致🔼
3.4在机器💒人示教器上无【qì shàng wú】法关闭💴数字输出信号【chū xìn hào】
ethernet/IP通讯中【tōng xùn zhōng】一直把使能至🚢true
3.5读取不到机器人的运行速率
ethernet/IP通讯中一直把【yī zhí bǎ】运行速🏮度使能【dù shǐ néng】🔓至true


























