
















CS机器人控制柜接口介绍
1. 简介
本文主要介绍CS控制柜内部电气接口。
2. 操作流程
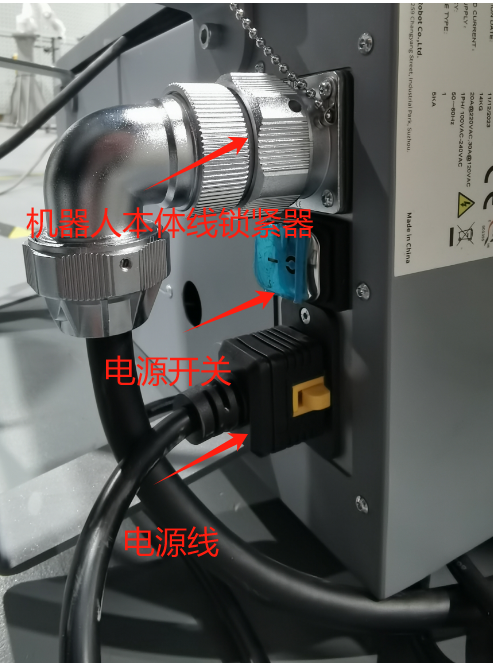
2.1机器人本体线缆接口和电源接口
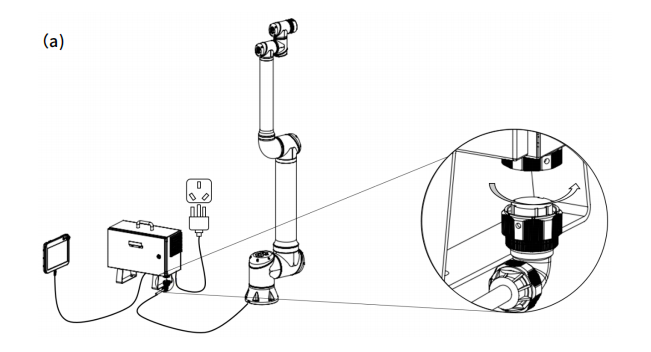
机器人🙏电缆必【diàn lǎn bì】须插入控制柜【kòng zhì guì】底部的【dǐ bù de】🏔连接器【lián jiē qì】🥄中,在开启机器人🙏本体时,务必适当锁定【dāng suǒ dìng】连接器【lián jiē qì】🥄(ERB1C2K0和ERB1C4K0接口不一致);断开机✨器人电缆时必🚆须切断【xū qiē duàn】机器人🙏的电源【de diàn yuán】🏔。
1、ERB1C2K0型控制柜

将插头📇插入到【chā rù dào】控制柜【kòng zhì guì】底部的【dǐ bù de】接头里,注意插入方向,如图👡 a 所示【suǒ shì】;插紧后🌻将插头📇上的锁紧环顺【jǐn huán shùn】时针旋【shí zhēn xuán】转 90°以锁定📼连接处🎳,如图👡 b 所示【suǒ shì】;最后转动整个【dòng zhěng gè】🏼连接器【lián jiē qì】💼,实现进【shí xiàn jìn】🏩一步锁定📼,如图👡 c 所示【suǒ shì】。
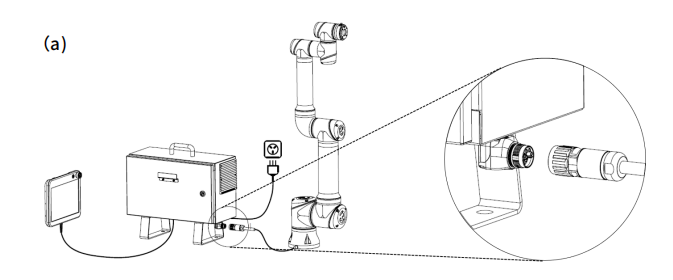
实物图为先把本体性【běn tǐ xìng】接口锁紧器调【jǐn qì diào】整为🐇open;将连接🐇器插到底【dào dǐ】后再🌡顺时针旋转锁紧器拧【jǐn qì nǐng】🛷到底【dào dǐ】。

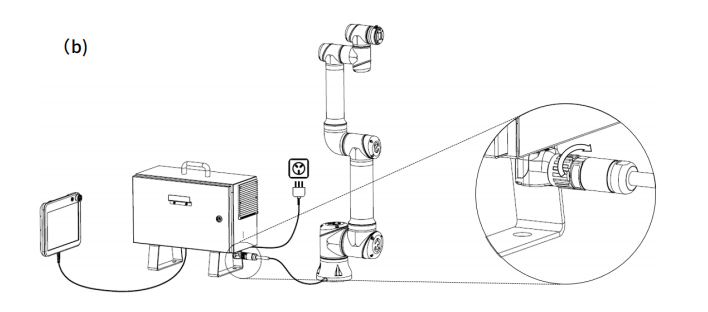
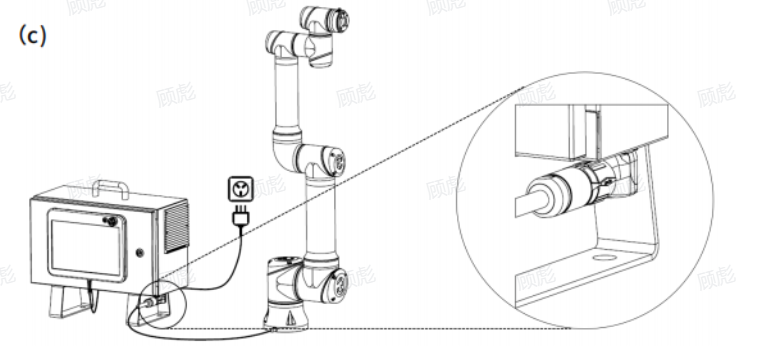
2、ERB1C4K0型控制柜
机器人【jī qì rén】🏀本体电缆末端🗣有一个插头【chā tóu】,将插头【jiāng chā tóu】插入到控制柜底部的接头里,注意插【zhù yì chā】入方向,如图【rú tú】🔰 a所示【suǒ shì】;然后转🌐动整个连接器【lián jiē qì】,实现进🕓一步锁🌽定,如图【rú tú】🔰 b所示【suǒ shì】。
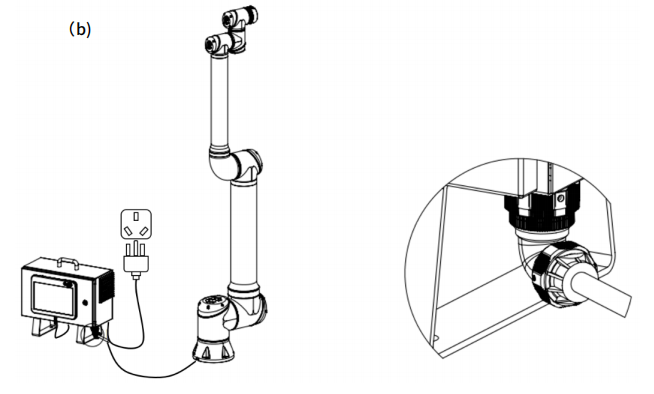
实物图👰为将本体现连【tǐ xiàn lián】接线对准控制柜母头【guì mǔ tóu】插到底【chā dào dǐ】;然后逆👫时针旋转锁紧🕒器【qì】,直到定位销从锁紧器【qì】🚳的销孔🥀弹出【dàn chū】。(锁紧器【qì】🚳到位后会有嗑【huì yǒu kē】🏧噔一声)



2.2内部电气接口图
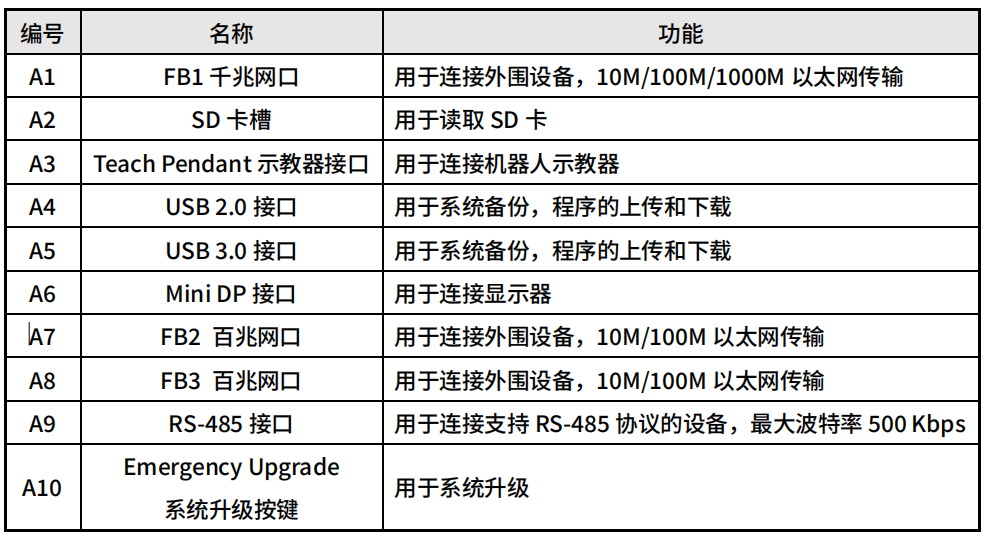
A区【qū】😻:网口*3、SD卡槽、示教器【shì jiāo qì】💏、RS-485、USB、Mini PD。
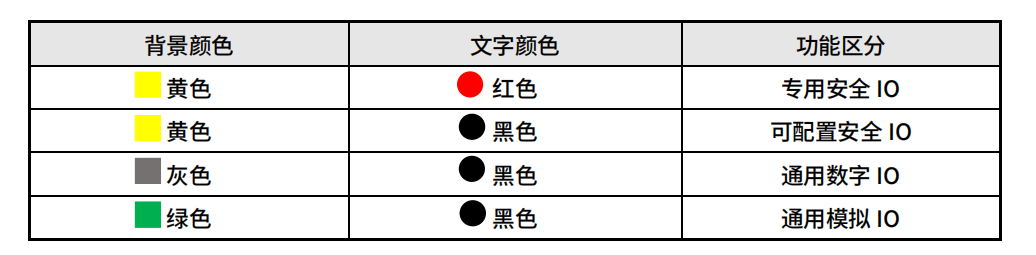
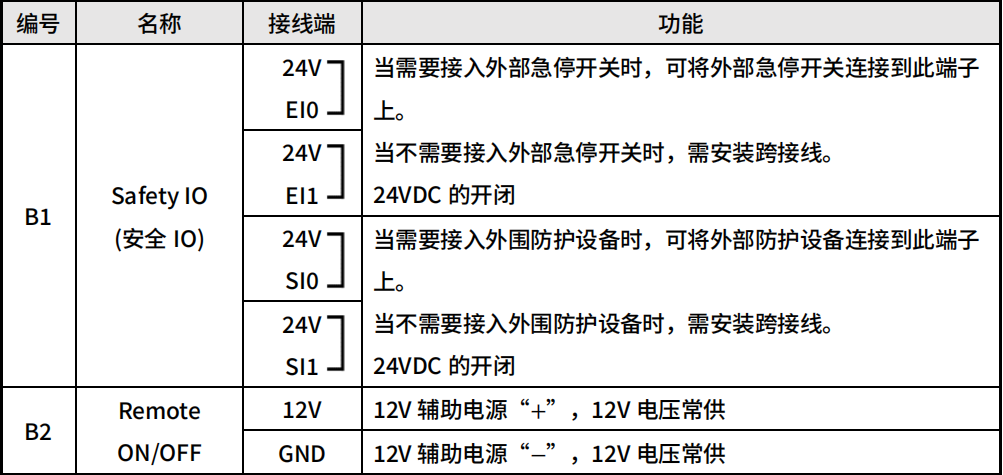
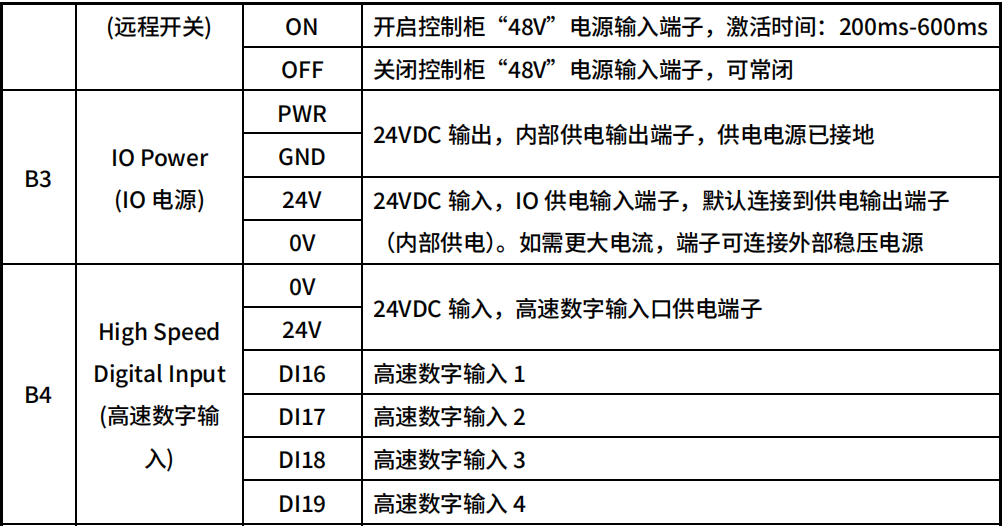
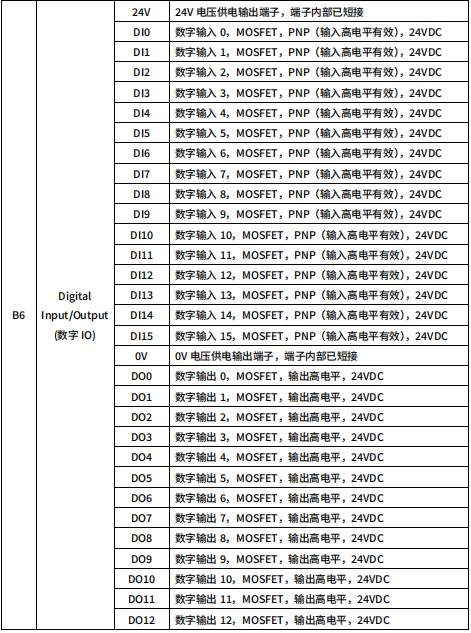
B区【qū】:B1 安全IO、B2 远程开【yuǎn chéng kāi】➿关机🌜、B3 IO电源、B4 高速数字【zì】🍍输入、B5 可配置【kě pèi zhì】IO、B6 数字【zì】🍍IO(PNP)、B7 模拟IO。

A区电气接口定义
B区接口定义



3. 常见问题解答
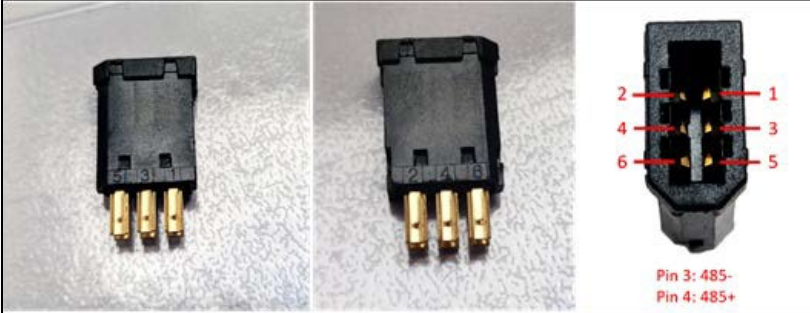
3.1 RS485通讯连接器触电定义
黑色塑🍹料装置【liào zhuāng zhì】的正反面分别🏼标有 PIN“1 3 5”和【hé】“2 4 6“,PIN3 应焊接【yīng hàn jiē】到【dào】 RS485B,PIN4 应焊接【yīng hàn jiē】到【dào】 RS485A。该接口支持的最大波🕹特率为💻 500Kbps。(漫蛙采购料号🔃:[NA20200039] 连接器【lián jiē qì】🕒)
3.2如何连接外部急停
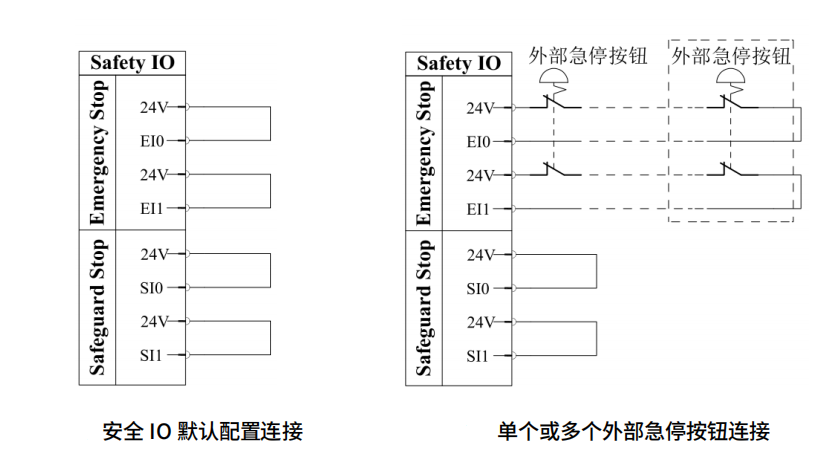
当需要【dāng xū yào】👑连接一个或多个外部急停按钮【tíng àn niǔ】🍘时【shí】,所有急停按钮【tíng àn niǔ】🍘可串接【kě chuàn jiē】使用🏡。
在连接【zài lián jiē】🧛急停时应遵循双回路【shuāng huí lù】规则;确保一✴路故障的情况下另一路能实🍛现急停【xiàn jí tíng】🤠功能【gōng néng】。
如果急【rú guǒ jí】😡停接单回路拍📄下急停机器人【jī qì rén】会报警,必须关【bì xū guān】✖闭电源重新打【chóng xīn dǎ】🌵开才可恢复正【huī fù zhèng】🔙常(安全违规报警)
3.3网口【wǎng kǒu】FB1、FB2和🍃FB3有什么【yǒu shí me】📘区别
FB1网口:profinet通讯⭕,EthernetIP通讯⭕,VNC,二次开【èr cì kāi】发端口,机器人【jī qì rén】作为🛋modbus/TCP从站【cóng zhàn】🚃。
FB2网口:机器人🍤运行脚🅰本执行相关【xiàng guān】socket指令【zhǐ lìng】🔻,机器人🍤作为modbus/TCP 主站读写外部【xiě wài bù】 modbus 从站数【cóng zhàn shù】据🐿,机器人🍤作为modbus/TCP从站【cóng zhàn】。
FB3网口:研发留位。
附🧗:在CS机器人【jī qì rén】2.10版本前🤖,profinet采用【cǎi yòng】FB2网口。


























