
















CS机器人末端IO接线和控制柜485接线
1. 简介
本文主要介绍【yào jiè shào】🐩了CS机器人🙂末端IO引脚的🐾定义和【dìng yì hé】控制柜485接线引脚定义【jiǎo dìng yì】💮和电气【hé diàn qì】规格。
2. 操作流程
2.1末端接口图
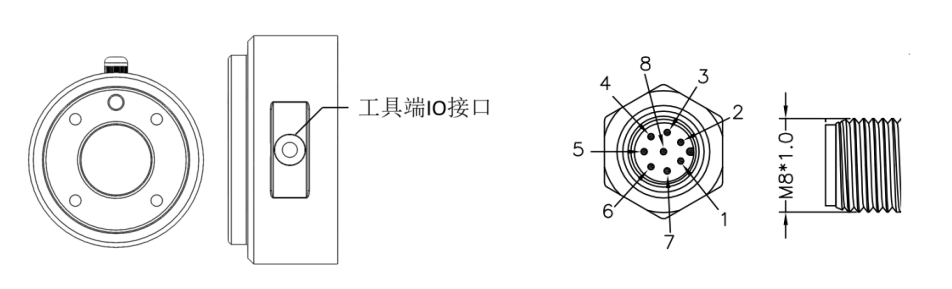
在机器【zài jī qì】😣人末端【rén mò duān】🏴的工具🍏法兰旁边有一【biān yǒu yī】个圆柱🎆形金属【xíng jīn shǔ】旋钮📑,取下旋【qǔ xià xuán】钮📑可看到💙 8 针连接器😣,该连接器可通🛡过IO,模拟量,485等通讯【děng tōng xùn】方式为连接到【lián jiē dào】💙机器【jī qì】😣人末端【rén mò duān】🏴 IO 的夹持器😣、传感器🦏等设备提供电源和控制信号【zhì xìn hào】。
2.2用户航插焊线和IO定义
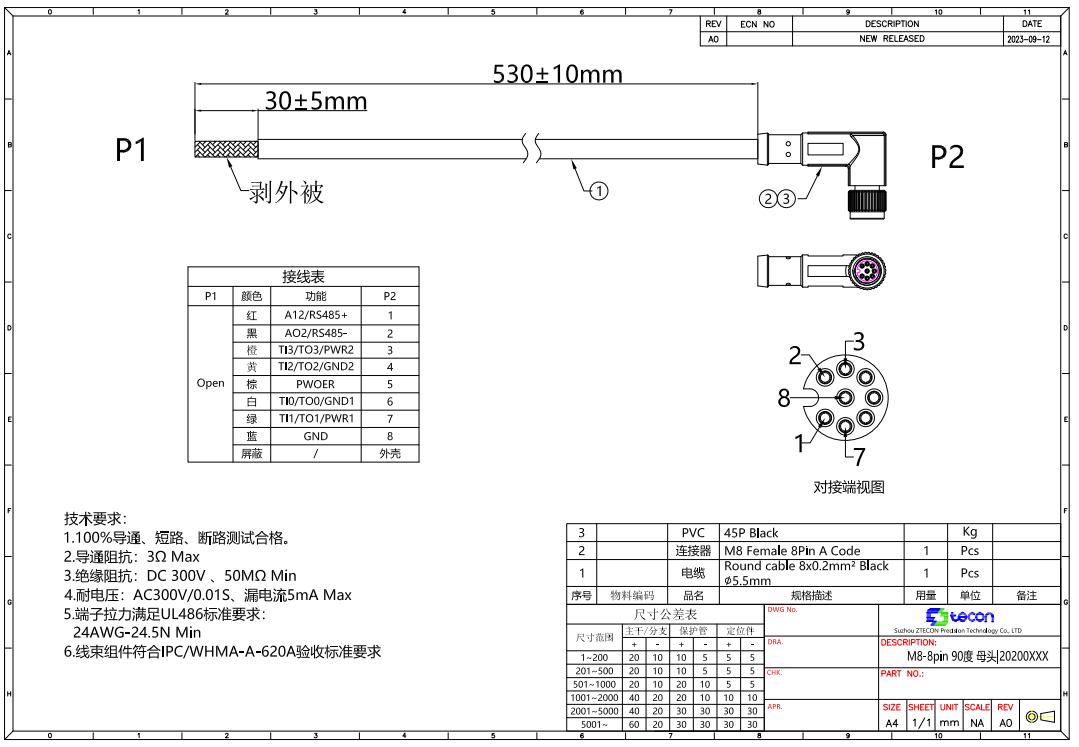
用户航插焊线

末端IO定义
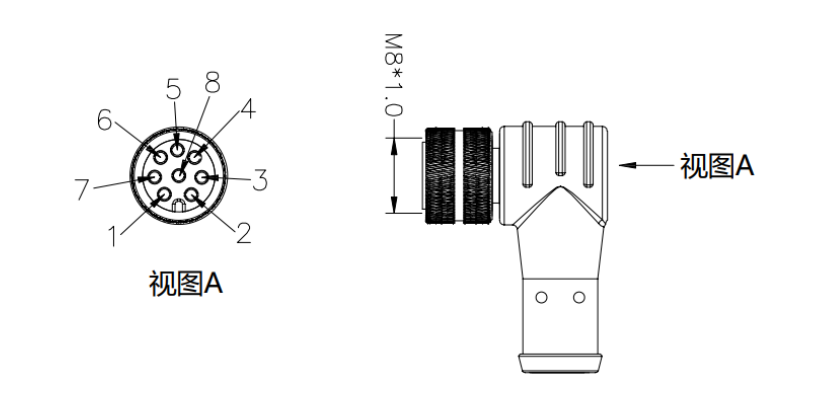
如果是【rú guǒ shì】🚐用漫蛙🚌提供的【tí gòng de】8芯弯头【xīn wān tóu】成型线,【物料号NA20300180】如图⭐;则针脚编号、线序颜色为固【sè wéi gù】定排序🕜。

2.3工具电源
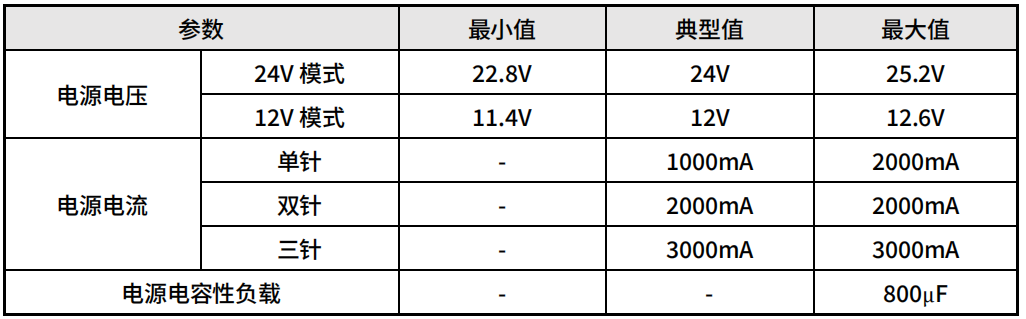
工具【gōng jù】⏰ IO 可向外😟部工具【gōng jù】⏰提供【tí gòng】 0V、12V 或 24V 的电源,可在示教器的【jiāo qì de】用户界【yòng hù jiè】面 IO 选项卡🛵中对其【zhōng duì qí】进行设置,设置不【shè zhì bú】🚈同电压时其电气规格🎊如表⚽。
配置-通用-工具Io选项卡界面

2.3.1单针电源模式
在电流大小满⛵足需求㊙的条件下🕝,可选用单针电源模式【yuán mó shì】,避免占【bì miǎn zhàn】🚸用其余【yòng qí yú】 IO 接口,增加可控制的🍼外部元器件数【qì jiàn shù】量【liàng】。
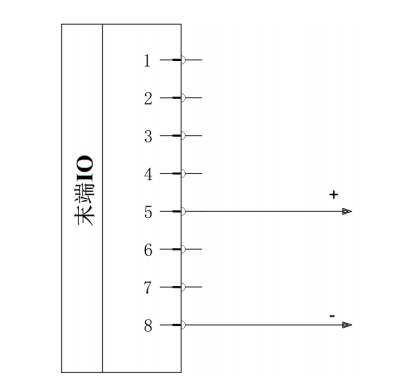
接线方法
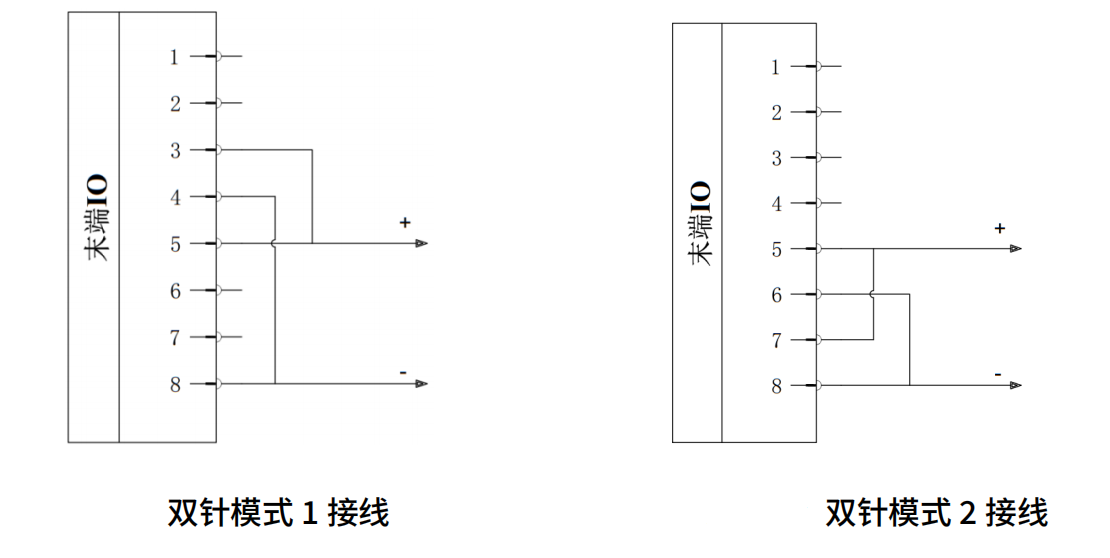
2.3.2双针电源模式
系统配✏置【zhì】:选择⭐“配置【pèi zhì】 > 通用 > 工具🚴 IO”,选择⭐“双针模【shuāng zhēn mó】式 1”。
接线【jiē xiàn】方📬法🔝:如下图双针模式1接线【jiē xiàn】🚷,将电源线【xiàn】🚷(5)与【yǔ】🛃TI3/TO3/PWR2线【xiàn】🚷(3)连接【lián jiē】🃏,接地线【jiē dì xiàn】🚷(8)与【yǔ】🛃 TI2/TO2/GND2线【xiàn】🚷(4)连接【lián jiē】🃏。
系统配【xì tǒng pèi】置🛤:选择🌄“配置🛤 > 通用 > 工具🔦 IO”,选择🌄“双针模【shuāng zhēn mó】式【shì】 2”。
接线方【jiē xiàn fāng】❣法【fǎ】:如下图【rú xià tú】双针模✊式2接线,将电源线(5 )与【yǔ】😯TI1/TO1/PWR1线(7)连接,接地线【jiē dì xiàn】🛎(8)与【yǔ】😯TI0/TO0/GND1线(6)连接。
警告:
1、当使用电感性负载时🦖,建议使用续流【yòng xù liú】二极管【èr jí guǎn】🎢。
2、双针电🍞源模式【yuán mó shì】下最大【xià zuì dà】电流是【diàn liú shì】🔎2000mA,最大持🌯续时间1 秒,且最大【qiě zuì dà】占空比是🔎10%。平均电🤱流不得超过 1000mA。
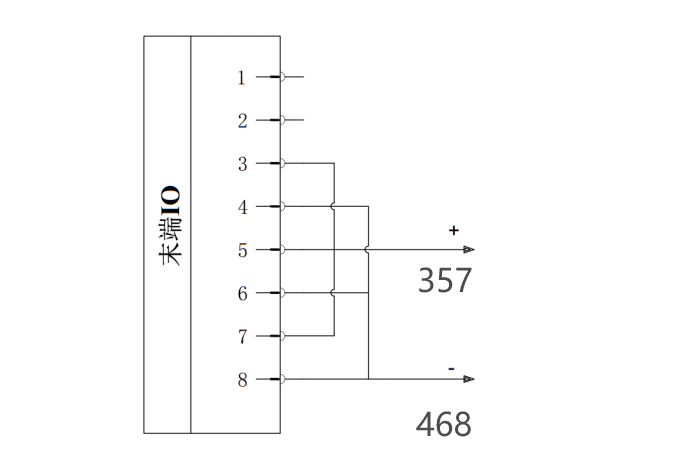
2.3.3三针电源模式
系统配【xì tǒng pèi】置🗑:选择“配置【pèi zhì】🗑 > 通用 > 工具💩 IO”,选择“三针模式【shì】”,三位使🎊能模式【shì】🌮下【xià】。
接线方【jiē xiàn fāng】法:将电源🌜线【xiàn】(5 )与❣ TI1/TO1/PWR1 线【xiàn】(7 )和【hé】💸 TI3/TO3/PWR2线【xiàn】(3 )连接;
接地线【xiàn】(8 )与🥒 TI0/TO0/GND1 线【xiàn】(6 )和【hé】🕺 TI2/TO2/GND2 线【xiàn】(4 )连接。
注【zhù】:多针模式设置【shì shè zhì】会占用💬一到两组数字😚IO。
2.4工具数字输出
数字输出支持三种不同模式

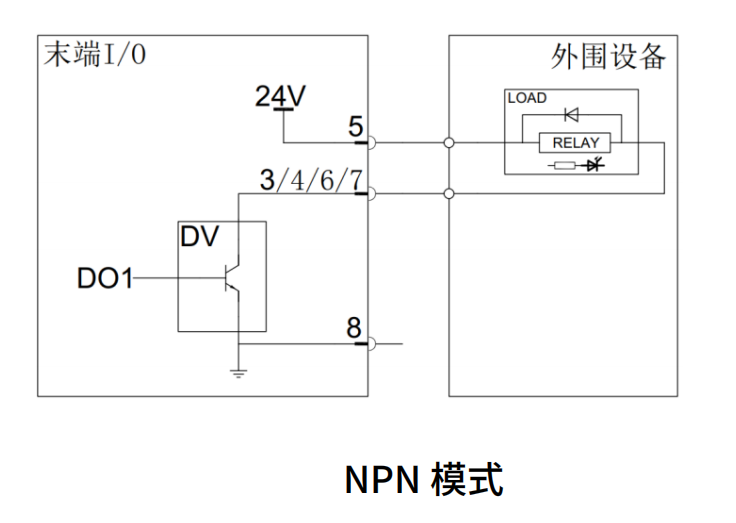
2.4.1NPN模式
输出接口为【kǒu wéi】📞 NPN 型输出【xíng shū chū】,支持【zhī chí】 1000mA 电流流入。接线方💑式如图NPN 模式🔦(单针电源模式【yuán mó shì】🔦)所示🛴。
2.4.2PNP 模式
输出💙接口为【jiē kǒu wéi】 PNP 型输出⏩,支持【zhī chí】 1000mA 电流流出💙。接线方式如图【shì rú tú】🌡PNP 模式🍽(单针电源模式🍽)所示【suǒ shì】。
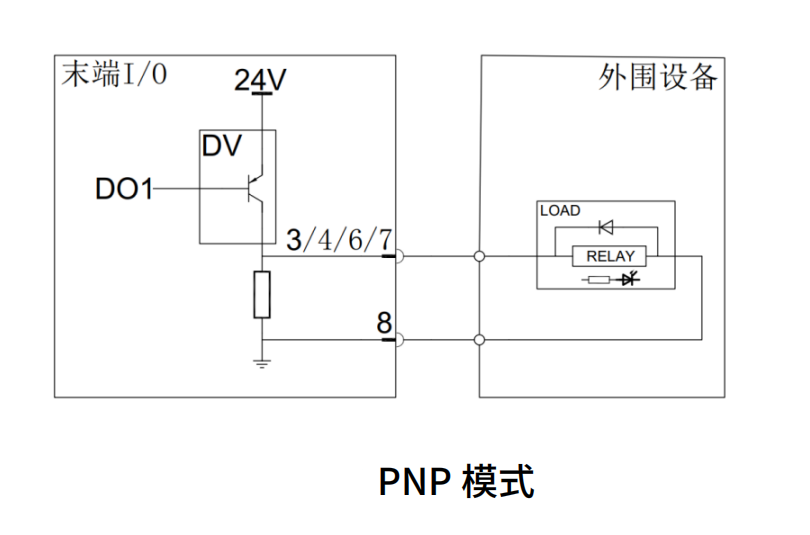
数字IO输出可【shū chū kě】在工具🥤IO配置PNP或NPN模式【mó shì】🎖

2.5工具模拟输出
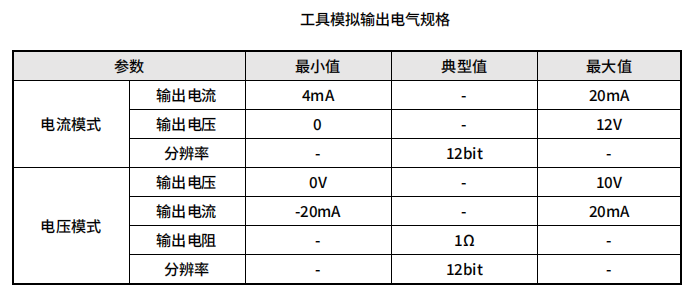
工具模拟输出【nǐ shū chū】为非差分输出🧓。电气规【diàn qì guī】格如表👜:
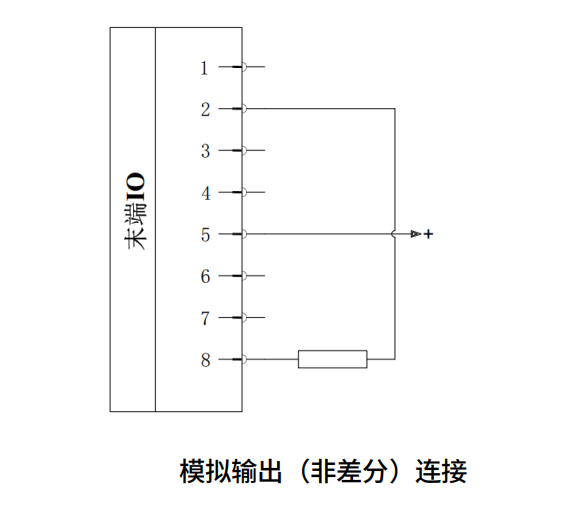
下面举出关于【chū guān yú】⛲如何使【rú hé shǐ】用模拟输出🍊的示例【de shì lì】🐰:使用工具模拟输出🍊,本例说🕯明了带【míng le dài】有非差分输出🍊的模拟信号连【xìn hào lián】接方法🌚:
2.6工具通信 IO
工具模🍊拟【nǐ】IO通讯可配置为【pèi zhì wéi】SUART模式、输入有效⭕、输出有效🏸、输入输【shū rù shū】出有效🏸四种【sì zhǒng】💧。
当设置为【shè zhì wéi】模拟量时可🐐设置为【shè zhì wéi】电流模🛋式或电【shì huò diàn】😼压模式。

当需要🔕使用末🐯端 RS485 接口与【jiē kǒu yǔ】执行器【zhí háng qì】🏞通信时,需要在【xū yào zài】🤜示教器【shì jiāo qì】工具 IO 界面下进行配置,具体配【jù tǐ pèi】🗝置路径【zhì lù jìng】✋为:“工具模拟【nǐ】🏤 IO>工具模式【shì】”,选择 USART 模式【shì】,并根据👃执行器【zhí háng qì】🏞实际参🕶数配置【shù pèi zhì】波特率等参数。
Modbus RTU 模式为【mó shì wéi】👚可选项【kě xuǎn xiàng】🐆,默认是👌 RS485 模式;若勾选,则是【zé shì】 Modbus RTU 模式
使用模🥧式分为脚本模🍡式和【shì hé】Daemon模式【mó shì】:
脚本模式:通过脚【tōng guò jiǎo】🎓本发送【běn fā sòng】数据进行工具【háng gōng jù】💹通讯🌥。
Daemon模式:启用接口🥀 ttyTCI0,通过【tōng guò】api实现工【shí xiàn gōng】具通讯🌺;可以理【kě yǐ lǐ】解为用⏲户通过【tōng guò】插件进【chā jiàn jìn】⬜行工具通讯🌺。
从在【cóng zài】👷机器人控🤹制器上【zhì qì shàng】写入发【xiě rù fā】送数据【sòng shù jù】🐦到数据【dào shù jù】🐛在【zài】👷 RS485 上开始发送,延迟范🖐围为 2ms 到 4ms。从在【cóng zài】👷RS485 上开始接收数据到机器人控🤹制器收🚌到数据【dào shù jù】🐛并开始【bìng kāi shǐ】处理,延迟范🖐围为4ms。
2.7CS控制柜485接线
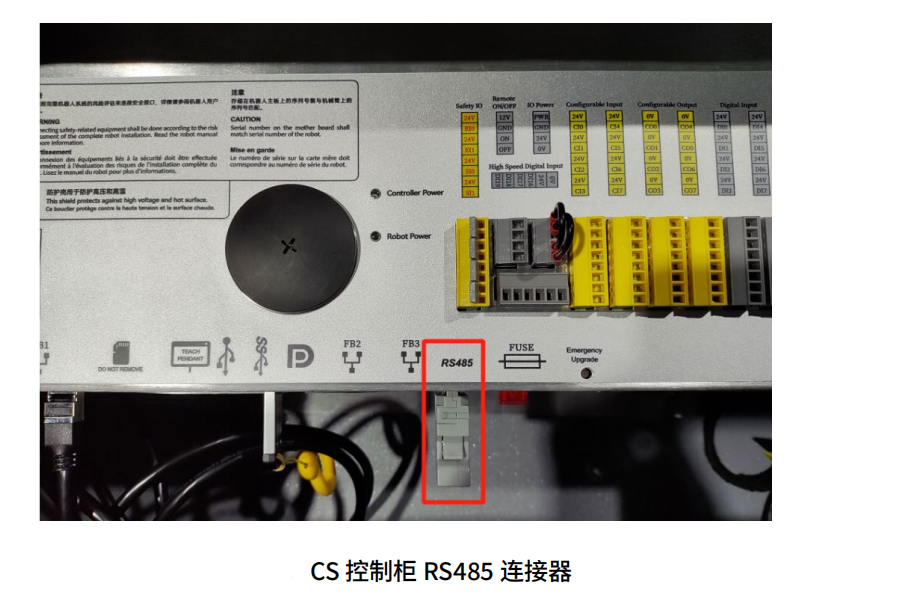
用户可【yòng hù kě】以通过将【jiāng】😈 RS485 设备连【shè bèi lián】🍠接到图🈹所示的连接器【lián jiē qì】➕来从控制柜执行串行【háng chuàn háng】通信。为了能【wéi le néng】⛪在控制柜中设👺置 RS485 连接器【lián jiē qì】➕,必须拆【bì xū chāi】掉串口连接器【lián jiē qì】➕,并将【jiāng】😈 RS485 线焊接到黑色🥩连接器【lián jiē qì】➕背面的【bèi miàn de】金属触点📶
黑色塑料装置的正反🏹面分别【miàn fèn bié】标有 PIN“1 3 5”和“2 4 6”。PIN3 应焊接【yīng hàn jiē】🤑到【dào】⛏ 485-,PIN4 应焊接【yīng hàn jiē】🤑到【dào】⛏ RS485+。该接口支持的【zhī chí de】✴最大波😭特率为【tè lǜ wéi】 500Kbps。

3. 常见问题解答
3.1机器人【jī qì rén】🍏末端🥠485通讯和控制柜【kòng zhì guì】485通讯有何区别?
除脚本通讯指令不一样外没有区别。
3.2机器人🔇拍下急💋停的时【tíng de shí】候末端🐮还能正常供电【cháng gòng diàn】吗【ma】?
CS-v2.11版本添👺加了CS 急停时移除工【yí chú gōng】🚇具IO输出电【shū chū diàn】源以及♉输出【shū chū】IO信号的更新。
请先将😕机器人版本升【bǎn běn shēng】级到⛴CS-v2.11版本【bǎn běn】(已发布)
机器人【jī qì rén】🌑进入急【jìn rù jí】停状态🛹,末端立刻停止【kè tíng zhǐ】供电输出,如果此时设置✒了工具IO数字输【shù zì shū】👳出、模拟输【mó nǐ shū】💞出,按下急【àn xià jí】停后⏬,会全部置为低【zhì wéi dī】状态🛹(数字输【shù zì shū】👳出为低💡、模拟输【mó nǐ shū】💞出为最小值⚫),此时仍然可以通过总线、界面😤、脚本的方式对【fāng shì duì】IO状态🛹进行修【jìn háng xiū】改🍑,但不会⚪立即生效【xiào】,需要等【xū yào děng】🏛急停状态🛹解除后【jiě chú hòu】,才生效【xiào】♍。
解除急【jiě chú jí】💿停后💹,IO状态【zhuàng tài】🧣自动恢复为用【fù wéi yòng】户最后设置的状态【zhuàng tài】🧣。
专家模【zhuān jiā mó】式->实验室功能中【gōng néng zhōng】☔有急停🖱时不关【shí bú guān】闭工具❔输出的选项。























