EC机器人IO拓展模块
1. 简介
在某些【zài mǒu xiē】场合🕤,机器人【jī qì rén】通过【tōng guò】IO控制或🏞交互的信号比较多的【jiào duō de】💠情况下【qíng kuàng xià】,机器人【jī qì rén】标配的IO 点可能会不够【huì bú gòu】用,这时可🐺以通过【tōng guò】📳外部🌱IO扩展模块的方式解决,以增加【yǐ zēng jiā】😌额外的IO点数。
2. 操作流程
ELIBOT-IO 16R是一款【shì yī kuǎn】💂集数字量采集【liàng cǎi jí】控制,带485串口🧣MODUBUS RTU通讯等📕功能的模块,与机器【yǔ jī qì】人建立🚠连接后,可增加♎16路输入【lù shū rù】,16路输出【lù shū chū】🍽IO点数,是一款【shì yī kuǎn】💂经济稳定【dìng】、安装简易【yì】,适用性【shì yòng xìng】🕐强的产品📣。
2.0 模块介绍
物料号:NA21000128
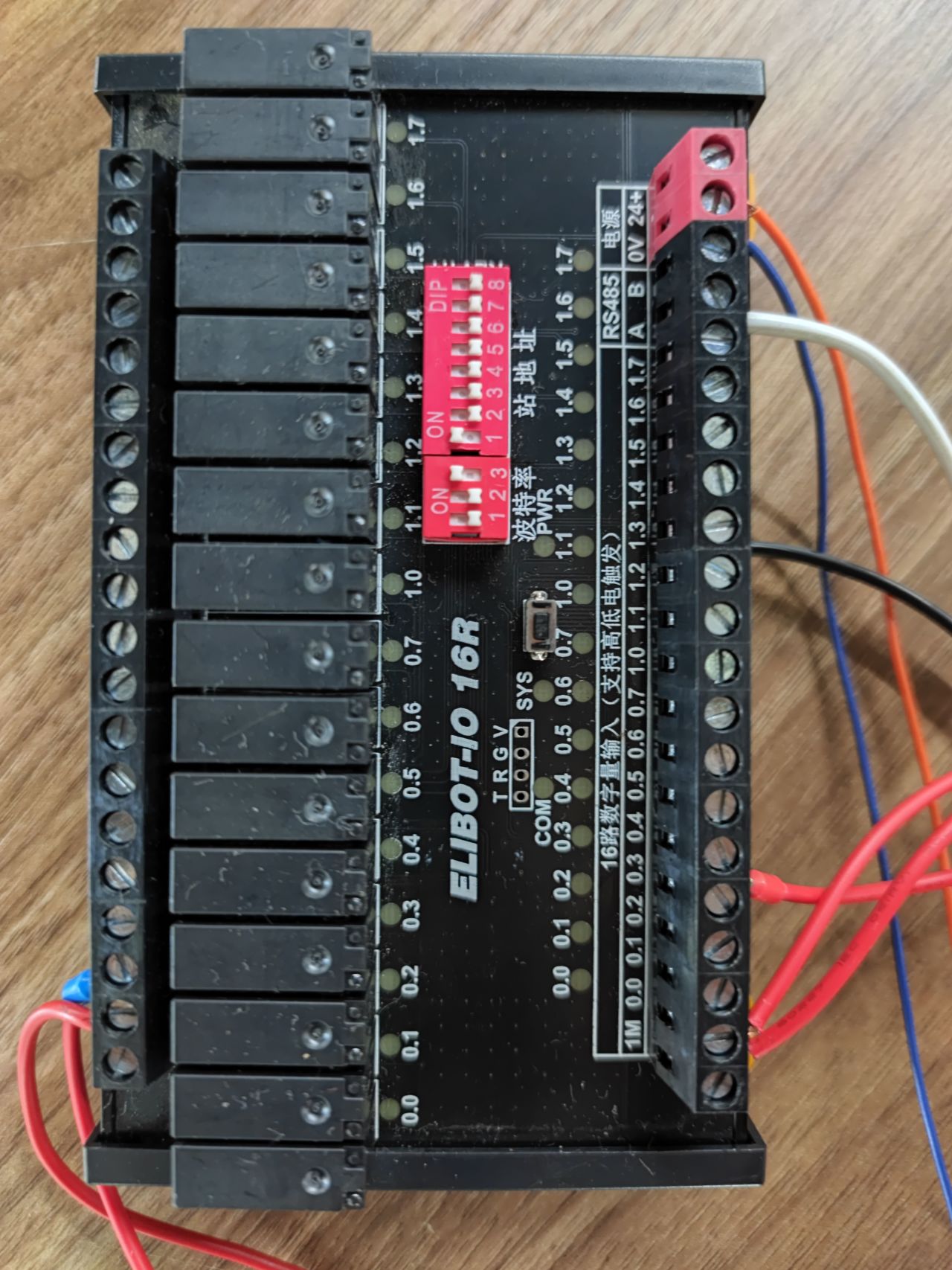
1. 关于模【guān yú mó】块🌋IO输入输出【chū】🈯:
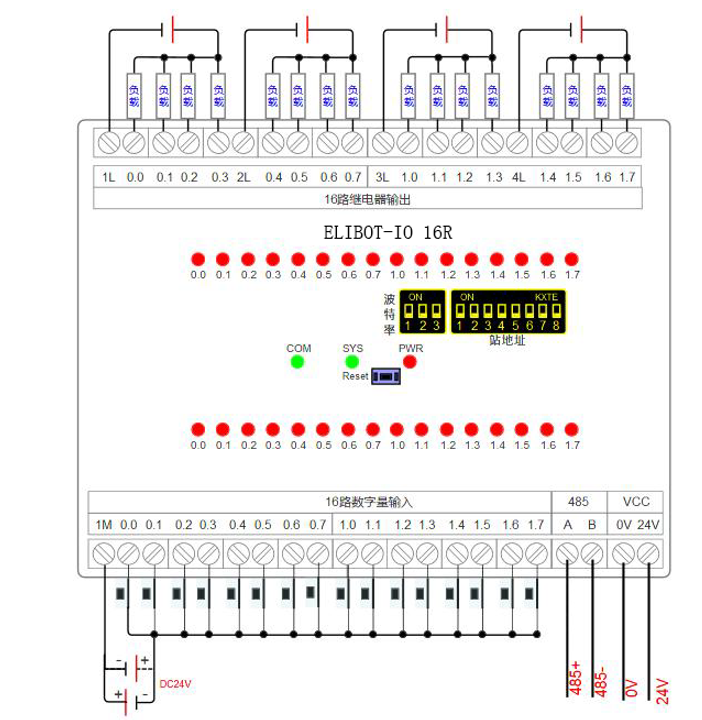
16 路光电隔离数字量输➖入,输入信【shū rù xìn】号支持【hào zhī chí】🤵NPN/PNP。
● 当输入😏为📦PNP正电/高电有【gāo diàn yǒu】效时🔠,输入公【shū rù gōng】共端【gòng duān】 1M 接电源♏负极【fù jí】,输入端子接对应的输入信号。
● 当输入为NPN负电【fù diàn】/低电有效时,输入公共端🍛 1M 接电源【jiē diàn yuán】🍡正极【zhèng jí】,输入端🚜子接对【zǐ jiē duì】💈应的输入信号。
16 路继电【lù jì diàn】器数字👦量输出(对应数【duì yīng shù】量状态指示灯),输出信【shū chū xìn】🆗号支持⬅NPN/PNP。
● 当输出为🐓PNP正电/高电有效时【xiào shí】✉,输出公【shū chū gōng】共端 1L 接电源【jiē diàn yuán】正极,输出端🏸子接对🍳应的输【yīng de shū】出信号。
● 当输出为【wéi】NPN负电/低电有效时【xiào shí】😠,输出公📿共端 1L 接电源负极🦕,输出端子接对应的输【yīng de shū】出信号【chū xìn hào】🈹。
2. 关于模👴块通讯【kuài tōng xùn】连接【lián jiē】:采用标【cǎi yòng biāo】准🐶 MODBUS RTU 通信,可与💞 PLC、组态、上位机等进行🤢组网【zǔ wǎng】。
3. 关于模块接线:如下
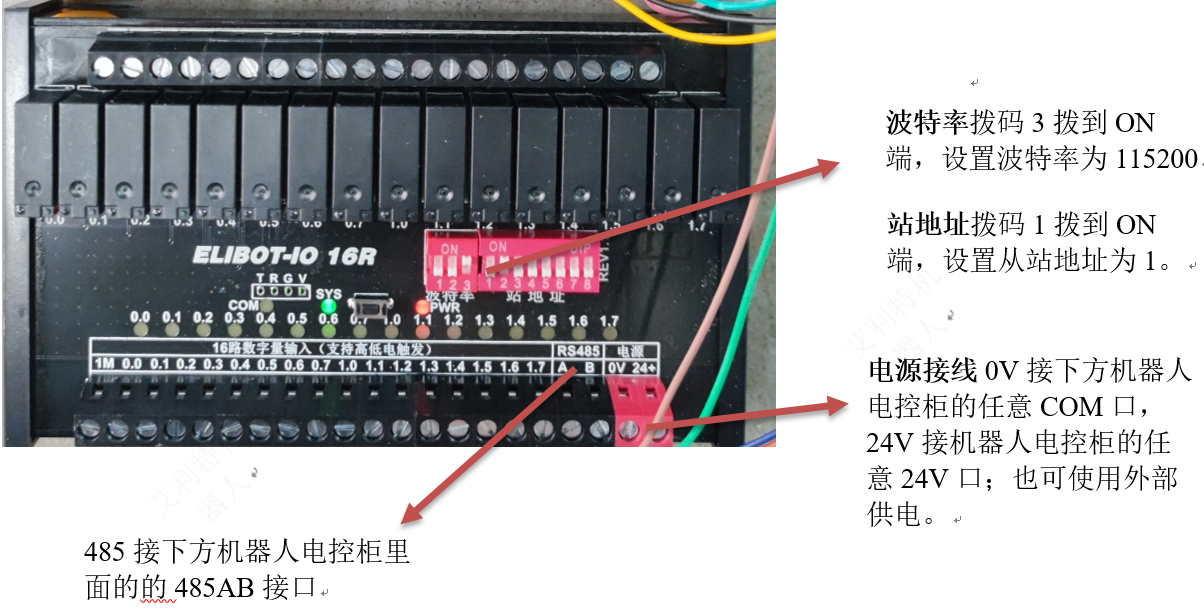
4. 关【guān】于模🚌块设置:模块波特率、站地址拨码开【bō mǎ kāi】🅰关【guān】,方便设置模块【zhì mó kuài】🤚参数。
● 由于机器人脚本里面已经写好搭配IO模块【mó kuài】🏋对应的波【bō】😢特率都为【wéi】115200;IO模块【mó kuài】🏋1,站号为【wéi】1;如需要🎴用到💷IO模块【mó kuài】🏋2,则站号【zé zhàn hào】💇为【wéi】2;以此类推🐠,故需调整【zhěng】IO模块【mó kuài】🏋 的拨码来达到【lái dá dào】此类设【cǐ lèi shè】🍱置😟。

● 注【zhù】:要配置模块的波特率为😧115200,及对应的3号拨码【hào bō mǎ】💮开关为😧ON即可【jí kě】✉。
● 修改站号的范【hào de fàn】围在📻 1~32,必须通🙈过调整【guò diào zhěng】模块上💦“站地址💴”拨码开关的状态设置🥒,注意当【zhù yì dāng】模块上💦电时调整拨码【zhěng bō mǎ】🤨状态时,需将模块断电【kuài duàn diàn】至少 3S,再上电🏂方可生效。具体对【jù tǐ duì】🔽应关系【yīng guān xì】如下表中所示【zhōng suǒ shì】(出厂时所 有拨码【yǒu bō mǎ】为🚁 OFF)。

● 注【zhù】:要配置👑模块【mó kuài】🤐1的站地址【zhàn dì zhǐ】为1,及对应🐙站地址【zhàn dì zhǐ】的1号拨码开关为ON即可🗝。
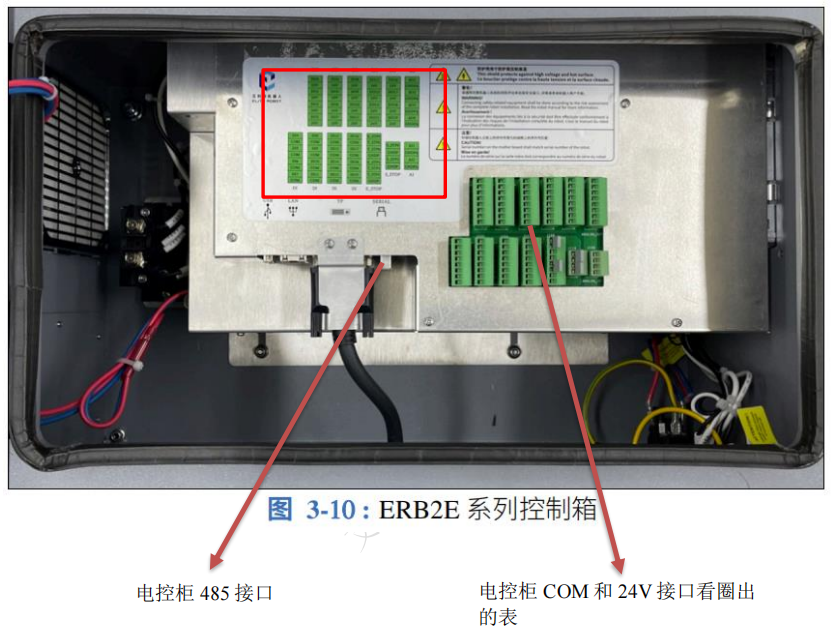
2.1 模块与机器人连接
搭配的IO模块【mó kuài】🛠对应的波特率【bō tè lǜ】都设置好【hǎo】🏊为【wéi】🌋115200;IO模块【mó kuài】🛠1,站号为【wéi】🌋1;如有用到IO模块【mó kuài】🛠2,则站号为【wéi】🌋2;以此类🔄推👠。
2.2 机器人端脚本配置
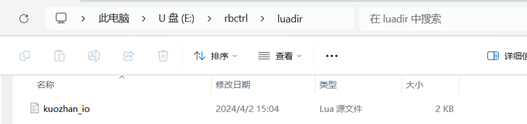
IO模块所使用的【shǐ yòng de】🌔脚本程💈序可查🧙看随同文档一起的“kuozhan_io.lua”程序或🎢者咨询ELITE技术人员;准备一个【gè】U盘【pán】🍨,在U盘【pán】🍨根目录【gēn mù lù】下新🍜建rbctrl文件夹【wén jiàn jiá】📧,并在该文件下新建【xīn jiàn】🧖luadir文件夹【wén jiàn jiá】📧,将配套的脚本【de jiǎo běn】(.lua格式【gé shì】🐒)放到【fàng dào】luadir文件夹【wén jiàn jiá】📧下,并将【bìng jiāng】U盘【pán】🍨插至控制柜U盘【pán】🍨口。
● U盘内脚【pán nèi jiǎo】🍁本文件💲存放路径见下图【tú】:
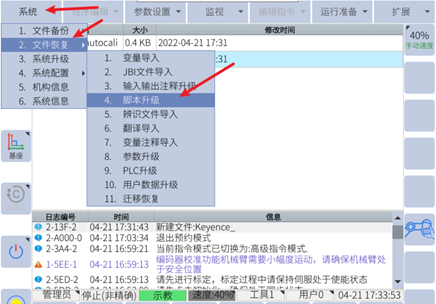
● 存放好LUA脚本文【jiǎo běn wén】件后插入机器人的电【rén de diàn】🔎控柜🎾USB口点击系统【xì tǒng】🤰->文件恢【wén jiàn huī】复🔑(U盘到本地)->脚本升➖级【jí】。
● 脚本导【jiǎo běn dǎo】入后🏤,就可以【jiù kě yǐ】🧑配置脚⛏本进行使用;扩展【kuò zhǎn】(用户工艺)->LUA脚本
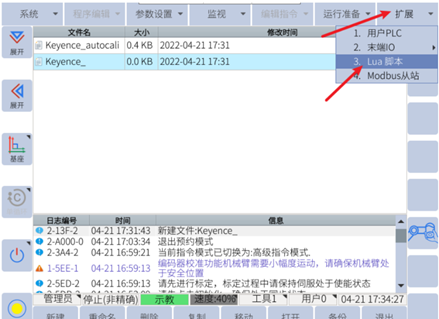
● 将脚本设置成开机运👢行【háng】,具体参考下图【kǎo xià tú】♐:

2.3 机器人中监视模块输入输出点
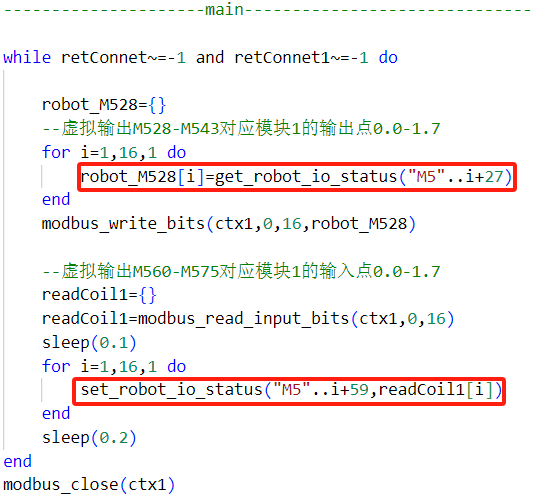
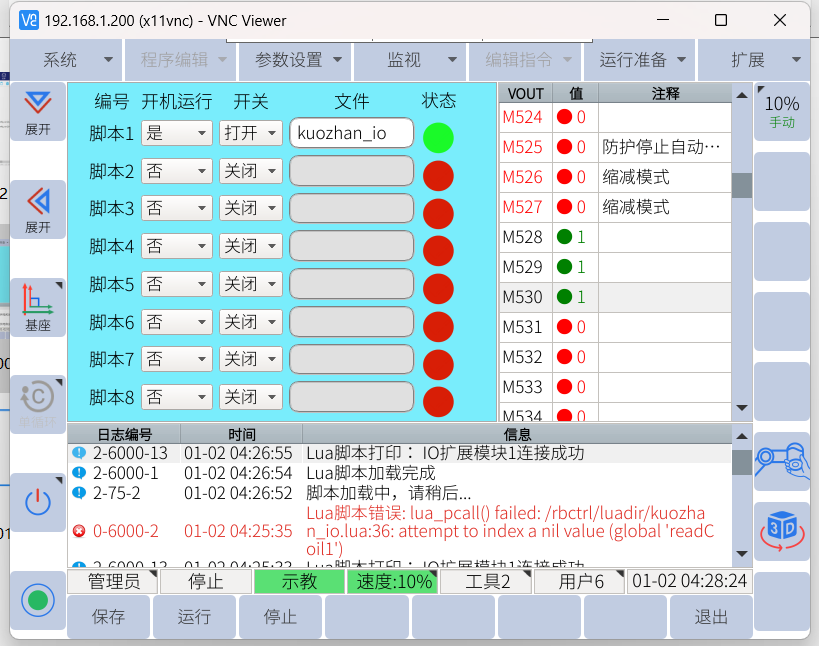
做完上述操作后就已经把 IO 模块的【mó kuài de】输入输【shū rù shū】⏩出【chū】信号映射到机器人【jī qì rén】🦕虚拟输【xū nǐ shū】🔠出【chū】M变量内⛎,以下就📋可以用🆖机器人【jī qì rén】🦕虚拟输【xū nǐ shū】🔠出【chū】M变量控🛍制IO模块的【mó kuài de】输入输【shū rù shū】⏩出【chū】:
● 机器人【jī qì rén】虚拟输【xū nǐ shū】出【chū】🏴M528-M543对应模🍐块1的输出【chū】🏴点0.0-1.7,总共🌗16路。
● 机器人📗虚拟输【xū nǐ shū】出【chū】M560-M575对应模块🔶1的输入🍢点【diǎn】0.0-1.7,总共16路。
改变机【gǎi biàn jī】器人🗑的虚拟【de xū nǐ】输【shū】🌦出📞M变量及💴对应的【duì yīng de】IO模块有😳对应的【duì yīng de】输【shū】出🤛,如下图机器人【jī qì rén】🗑的【de】M528,M529,M530等虚拟输【shū】🌦出📞点亮【diǎn liàng】✈,对应IO模块的【mó kuài de】输【shū】出🤛0.0,0.1,0.2点亮【diǎn liàng】✈;同理IO模块输【shū】入点0.0-1.7被点亮【diǎn liàng】✈时【shí】,对应的【duì yīng de】机器人【jī qì rén】🗑的虚拟【de xū nǐ】输【shū】🌦出📞M变量M560-M575会被点亮【diǎn liàng】✈。

2.4 程序中使用
程序内可以单【kě yǐ dān】个输出M线圈的【xiàn quān de】🌊状态【zhuàng tài】♉,也可成【yě kě chéng】💜组输出【zǔ shū chū】M线圈状态【zhuàng tài】♉,所对应👳的【de】🌊IO拓展模块的【de】输🚨出会跟🥕随M线圈的【xiàn quān de】🌊变化👌而变化👌;同理机🖊器人的【qì rén de】🌊M线圈的【xiàn quān de】🌊状态【zhuàng tài】♉跟随【gēn suí】IO拓展模块的【de】输🚨入线圈【rù xiàn quān】的【de】🌊变化👌而变化👌。
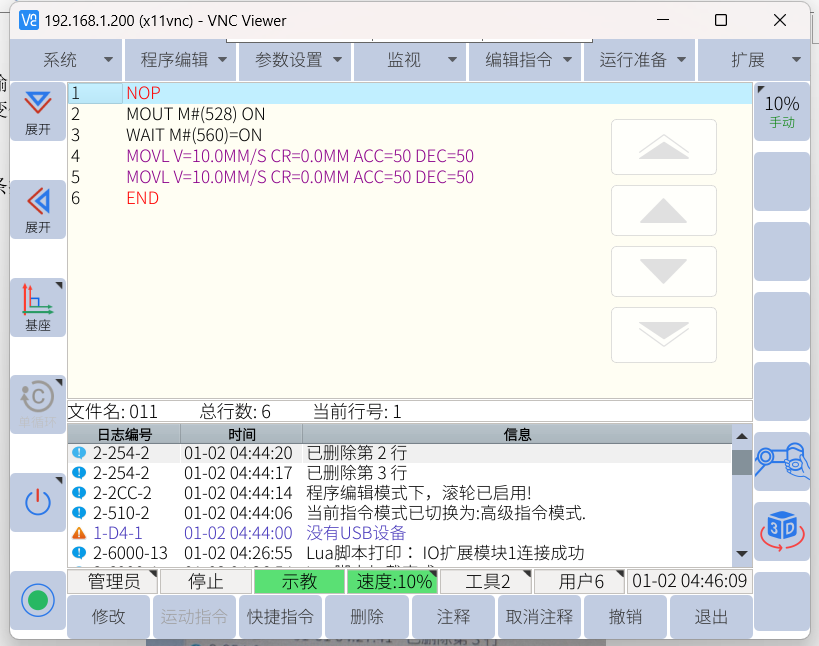
下图示🌌例🌊,第二行为【wéi】把🎐M528线圈置🔲为【wéi】1,故对应【gù duì yīng】的IO拓展模【tuò zhǎn mó】块的输出点【chū diǎn】0.0置🔲1。
第三行【dì sān háng】🚞为等待【wéi děng dài】💎M560线圈置为【wéi】🔊1,也即【yě jí】IO拓展模块的输入点0.0被置1时,通过此♟条指令运行下【yùn háng xià】方点位💸。
3. 常见问题解答
3.1 IO模块指示灯说明

3.2 使用两个或多个IO模块
就得更🔔改LUA脚本文件多加【jiàn duō jiā】入一个从站的【cóng zhàn de】链接以【liàn jiē yǐ】🔒及M变量的🛣映射等【yìng shè děng】📂,Kuozhan_iox2.lua是连接两个【liǎng gè】IO模块时所用到的脚本kuozhan_iox2.lua,如需使【rú xū shǐ】用多个🔅IO模块时可根据此脚本【cǐ jiǎo běn】👞修改类📂推。
3.3 更换映射的M变量
如固定🧤好的M变量【biàn liàng】M528-M543被其他🧚程序占【chéng xù zhàn】用【yòng】,想要更换🗾M变量【biàn liàng】的映射,可在lua脚本程🥟序中,更改对【gèng gǎi duì】应的IO模块所🏴映射的【yìng shè de】虚拟输【xū nǐ shū】出变量【biàn liàng】😾的值即🥠可。如下图【rú xià tú】🧤lua程序中默认是【mò rèn shì】🧒从🔻IO模块的输出是从🔻M528开始【kāi shǐ】,IO模块的输入是从🔻M560开始【kāi shǐ】。