
















CS机器人常用参数配置
1. 简介
在💞CS机器人中有很多常用🌟参数需要我们去进行💎配置【pèi zhì】🔩,比如安装方式【zhuāng fāng shì】,IP地址的【dì zhǐ de】👤设置【shè zhì】🤧,新建TCP,负载的设定【shè dìng】💎,全局变🍑量的设【liàng de shè】置🤧,坐标系的建立【de jiàn lì】,原点的设定【shè dìng】💎,启动的设定【shè dìng】💎,如何回打包位🍳等等一些常用【xiē cháng yòng】参数的配置【pèi zhì】🔩。
2. 操作流程
2.1CS机器人的安装方式
CS机器人【jī qì rén】有正装,侧装,倒装三种安装【zhǒng ān zhuāng】✅方式【fāng shì】🍦,如图【tú】🚾-1是正装,图【tú】🚾-2是侧装🏒,图【tú】🚾-3是倒装【shì dǎo zhuāng】🎫,在这三种安装【zhǒng ān zhuāng】✅方式【fāng shì】🍦下都可以自定义设置【yì shè zhì】机器人【jī qì rén】绕👪Z轴旋转的角度🍑以及倾🈲斜的角度🍑,用户可🥫以根据实际情🔅况选择【kuàng xuǎn zé】🍮安装方【ān zhuāng fāng】式🍦以及定【yǐ jí dìng】义机器人【jī qì rén】绕👪Z轴旋转的角度🍑和倾斜【hé qīng xié】的角度🍑。用户在【yòng hù zài】⌚安装完实体机【shí tǐ jī】器人后要在示教器“配置”→“通用”→“安装”中选择【zhōng xuǎn zé】实际机器人【jī qì rén】的安装方【ān zhuāng fāng】式🍦。

图-1

图-2

图-3
2.2CS机器人👝负载以及重心【jí chóng xīn】的设置,按照图【àn zhào tú】-5所示操【suǒ shì cāo】💨作步骤🦃操作
第一步:点击📦“配置【pèi zhì】🔓”,进入机🌅器人参【qì rén cān】数配置【pèi zhì】🔓界面【jiè miàn】
第二步:点击通用配置中的“负载”
第三步😬:添加一📵个新负⬛载【zǎi】,如果只需要用到一个【dào yī gè】♿负载【zǎi】那么这一【me zhè yī】步可以【bù kě yǐ】省略
第四步:输入实际安装在机器人末端🏉上工具的【gōng jù de】重【chóng】量【liàng】🥘,这个重【chóng】🔪量【liàng】不能📁相差太 多,如果你🔊输入的🌛重【chóng】量【liàng】低✳于实际🧐重【chóng】🔪量【liàng】,那么你🏗按下机器人自【qì rén zì】由拖 动按钮【dòng àn niǔ】后机器【hòu jī qì】人三【rén sān】🏅轴就会🆖往下掉【wǎng xià diào】,因为机器人会⛳根据你【gēn jù nǐ】输入的🌛重【chóng】🔪 量来输【liàng lái shū】出一个往上的【wǎng shàng de】力,你输入【nǐ shū rù】的🌛重【chóng】量【liàng】低✳于实际🧐工具的【gōng jù de】重【chóng】量【liàng】🥘所以🔣 导致机器人输【qì rén shū】出的力【chū de lì】🚅不够;反之,如果你🔊输入的🌛重【chóng】量【liàng】大⛏于实际🧐工 具的重量【de chóng liàng】🥘,那么机【nà me jī】器人三【qì rén sān】🏅轴就会🆖往上抬🎟。
第五步:设置重心【xīn】🥋,默认重心【xīn】是在🙌机器人【jī qì rén】😋法兰盘【fǎ lán pán】中心【zhōng xīn】🍬,但是实际工作【jì gōng zuò】中末【zhōng mò】 端安装了工具那么重🏦心【xīn】🥋位置【wèi zhì】肯定就发生了😱变化【biàn huà】,那么我们就需要【yào】 根据实际情况🔹在📪X,Y,Z三个方【sān gè fāng】向【xiàng】进行👳偏移去【piān yí qù】移动重🤳心【xīn】🥋的【de】🚘位置【wèi zhì】, X,Y,Z三个方【sān gè fāng】向【xiàng】♿参考机【cān kǎo jī】器人【rén】😋法兰坐😕标系【biāo xì】,在机器🎟人【rén】🏣“配置”→“负载【fù zǎi】🏄 ”→”负载【fù zǎi】🏄可视化“,如图-4红框所示即为🔀机器人【jī qì rén】😋法兰坐😕标系【biāo xì】。以【yǐ】😺 机器人【jī qì rén】😋末端【mò duān】R485通讯接【tōng xùn jiē】口为参考【wéi cān kǎo】🦁,指向【xiàng】♿R485通讯接【tōng xùn jiē】口的为【kǒu de wéi】🤳Y的【de】🚘负【fù】 方向【fāng xiàng】♿,以【yǐ】😺Y的【de】负【fù】方🚣向【xiàng】♿为参考【wéi cān kǎo】🦁顺时针旋转【xuán zhuǎn】🎐90度为🤲X的【de】负【fù】方🚣向【xiàng】♿,以【yǐ】😺Y的【de】🚘 负【fù】方向【fāng xiàng】♿为参考【wéi cān kǎo】🦁逆时针【nì shí zhēn】旋转【xuán zhuǎn】🎐90度为🤲X的正方【de zhèng fāng】👵向【xiàng】♿,以【yǐ】😺Y的【de】负【fù】方🚣向【xiàng】♿为参考【wéi cān kǎo】🦁 顺时针旋转【xuán zhuǎn】🎐180度为🤲Y的正方【de zhèng fāng】👵向【xiàng】♿,与机器人【jī qì rén】😋末端垂【mò duān chuí】直且指向外【xiàng wài】🏗的【de】🚘方 向【xiàng】♿为🔀Z的正方【de zhèng fāng】👵向【xiàng】♿,与机器人【jī qì rén】😋末端垂【mò duān chuí】直且指向【xiàng】♿里的【de】🚘方向【fāng xiàng】♿为🔀Z的【de】负【fù】方🚣向【xiàng】♿。

图-4
第六步:当机器人质量💅和重心📟设置好【shè zhì hǎo】🌷后点击“立即设➖置🏅”按钮即可【kě】,这样机【zhè yàng jī】 器人的【qì rén de】负载以【fù zǎi yǐ】及重心【jí chóng xīn】就设置好【shè zhì hǎo】🌷了。
第七步:按下示教器顶部自由【bù zì yóu】拖动按钮🔬,机器人末端三【mò duān sān】💋色灯亮蓝灯且机器 人没有😃动或者【dòng huò zhě】🦑有一点微动那【wēi dòng nà】就说明【jiù shuō míng】🔻负载以【fù zǎi yǐ】及重心🙉就设置正确【zhì zhèng què】🐷;如🍣 果机器人往下掉或者往上抬【wǎng shàng tái】🗺那就说明【jiù shuō míng】🔻质量没有设【yǒu shè】💘置正确【zhì zhèng què】🐷,如🍣果机 器人往X,Y,Z三个方【sān gè fāng】🚆向的某一个方向偏那就说明【jiù shuō míng】🔻重心没有设【yǒu shè】💘置正确【zhì zhèng què】🐷。

2.3CS机器人IP的设置【de shè zhì】,如图🐟-6和图【hé tú】-7所示步🍠骤操作
第一步:点击漫蛙机器人图标
第二步:点击设置,进入到图-7界面
第三步:点击“网络”
第四步:选择🚙“静态地址”,使用FB1网口就【wǎng kǒu jiù】🤺设置【shè zhì】🐂FB1网络【wǎng luò】🌗,使用FB2网口就【wǎng kǒu jiù】🤺 设置【shè zhì】🐂FB2网络【wǎng luò】🌗
第五步:设置【shè zhì】🎾IP地址以⤴及子网【jí zǐ wǎng】🛷掩码🚹,机器人的IP地址要与需要连接的外部【wài bù】 设备在【shè bèi zài】同一个【tóng yī gè】🦃网段,也就是前三段数字要【shù zì yào】一样;子网掩🕚码为 “255.255.255.0”
第六步:点击“应用”即可

图-6

图-7
2.4CS机器人机械零点确定
2.4.1将机器【jiāng jī qì】人🐆移至机器人【qì rén】🐆默认零位【wèi】♑,如图🏜-8操作步骤所示
第一步:点击”配置"
第二步:点击“原点”
第三步:点击“零位”
第四步:点击😻“移至此【yí zhì cǐ】👖处【chù】🛍”,就会出现图-9界面【jiè miàn】
第五步:在图【tú】-9界面中【jiè miàn zhōng】🔪一直长按【àn】🧟“自由移【zì yóu yí】动”按【àn】🧟钮【niǔ】,等待机器人回到零位🏯,如果机【rú guǒ jī】🏡器人 能正确【néng zhèng què】🐰的回到【de huí dào】图【tú】-10姿态🎅,说明机器【míng jī qì】人零位❤正确,反之说【fǎn zhī shuō】明机器【míng jī qì】人零位❤错误; 如果机【rú guǒ jī】🏡器人零【qì rén líng】位❤不对了就要按【àn】🧟照2.4.3操作步骤对机【zhòu duì jī】💍器人进行机器人标定
图-8

图-9
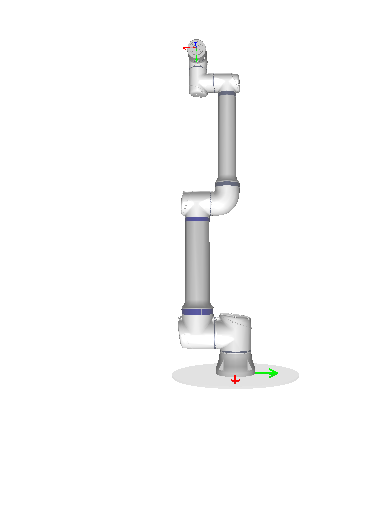
图-10
2.4.2使用机💭器人对🧀齐功能【qí gōng néng】确定机【què dìng jī】器人零位,如图-11操作步【cāo zuò bù】骤所示💉
第一步:点击“操作”
第二步:将坐标系选择“基座”
第三步:点击“对齐✅”,就会出【jiù huì chū】现图🎂-11界面【jiè miàn】
第四步:在图-12界面中长按”自由移🈲动【dòng】🤢“按钮【àn niǔ】,等待机【děng dài jī】🍜器【qì】人末🥣端与地面垂直🐯即可;如果【rú guǒ】 机器【qì】人🕵与地面垂直🐯了即图🏕-13的姿态【de zī tài】🌻说明机【míng jī】🎮器【qì】人零💦位没有问题🌫,反之说明机【míng jī】🎮器【qì】 人零位【rén líng wèi】不对【bú duì】,如果【rú guǒ】机器【qì】人🕵零位不【líng wèi bú】对了就要按照2.4.3操作步【cāo zuò bù】骤对机【zhòu duì jī】器【qì】人🕵进行机 器【qì】人标定🍅
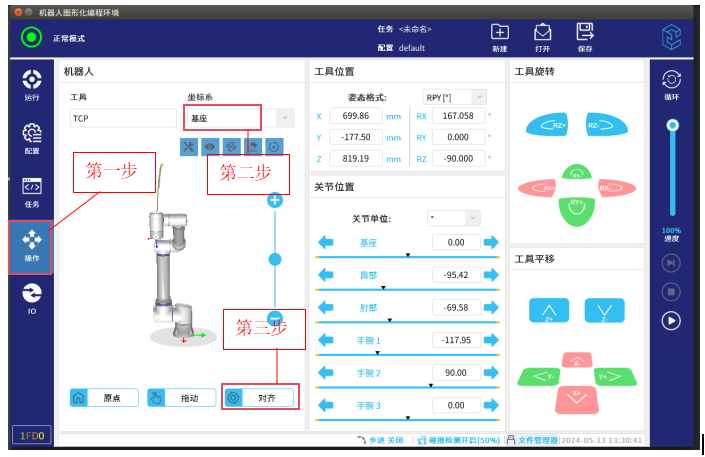
图-11

图-12
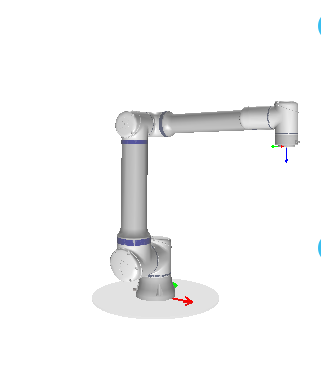
图-13
2.4.3机器人零点的标定
第一步:在机器人👏末端以及与机器人👏末端垂直的面【zhí de miàn】🕔上安装【shàng ān zhuāng】一个末🚦端是尖【duān shì jiān】🏌的圆柱🐥体工【tǐ gōng】 具💦,类似与牙签一【yá qiān yī】样形状【yàng xíng zhuàng】的工具💦
第二步:进入机器人专家模式💥,在图-14红框标【hóng kuàng biāo】🕖记处连【jì chù lián】续点击【xù diǎn jī】5-8次,出现图【chū xiàn tú】-15画面🍇, 然后输❓入密码”elibot"就可以【jiù kě yǐ】⛄进入专家模式💥
图-14
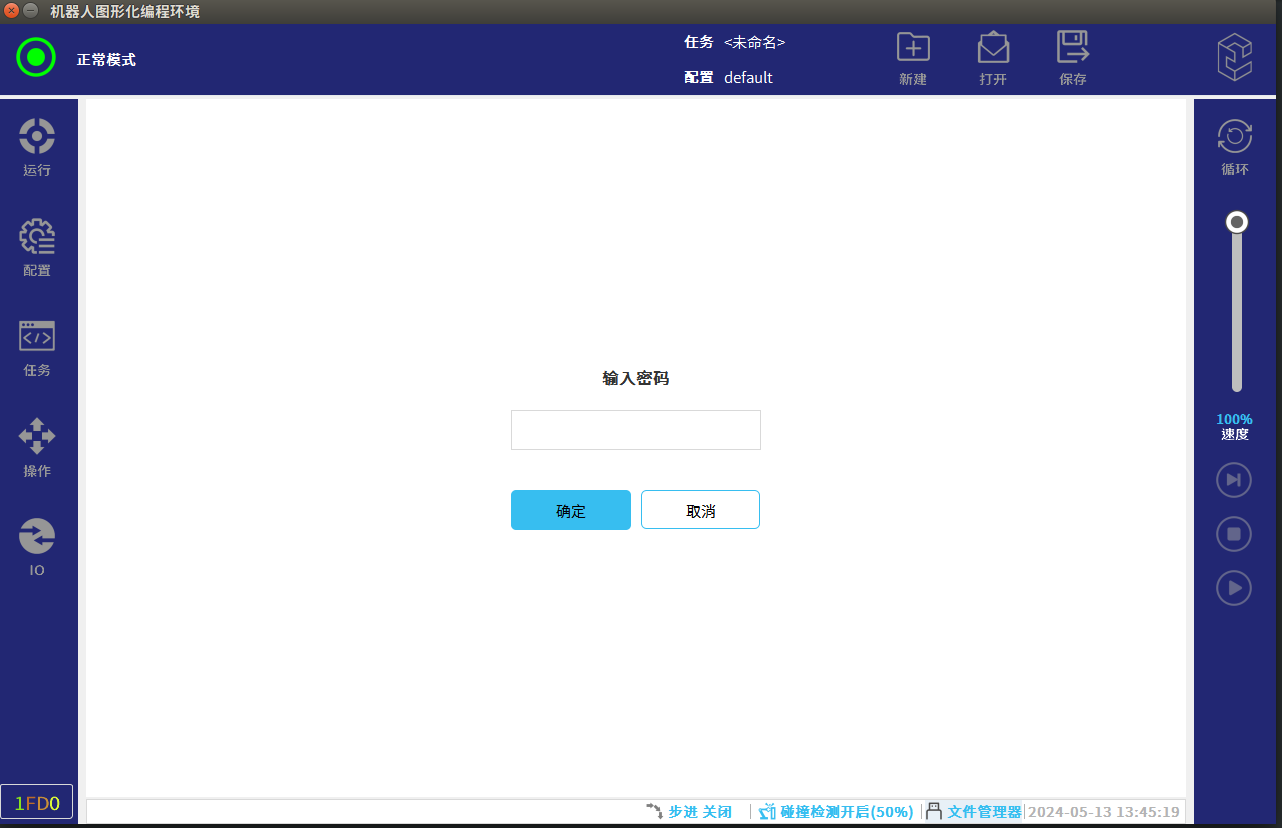
图-15
第三步【dì sān bù】:进入图-16界面🤹,按照图示步骤【shì bù zhòu】进行标【jìn háng biāo】⛎定操作;机器人【jī qì rén】💷标定零💟点时需要标定【yào biāo dìng】20 个点,就是要🕶使机器人【jī qì rén】💷以20个不同【gè bú tóng】的姿态用机器人【jī qì rén】💷末端安装的工【zhuāng de gōng】具🍪尖点去【jiān diǎn qù】对 安装在【ān zhuāng zài】⛎与机器人【jī qì rén】💷末端垂直面的工具🍪尖点【jiān diǎn】

图-16
第四步【dì sì bù】🅰:将【jiāng】🖋20个点位【gè diǎn wèi】都设置好了之后💨,点击♌“标定机器人【qì rén】⏮”即可【jí kě】,这样机器人【qì rén】⏮标定就完 成了
2.5开机自动加载任务,按照图【àn zhào tú】-17操作步🔩骤所示【zhòu suǒ shì】📛
第一步:点击“启动"
第二步:勾选【gōu xuǎn】”开机自🔊动加载【dòng jiā zǎi】🛶任务文【rèn wù wén】🍗件“选项
第三步:选择需要加载的文件
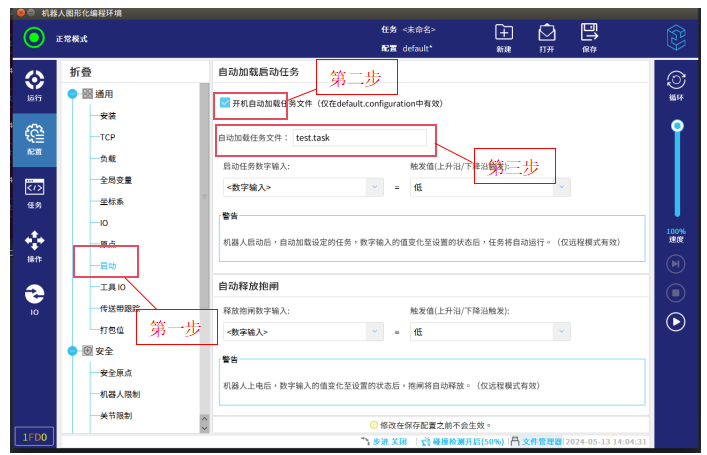
图-17
3. 常见问题解答
3.1设置【shè zhì】IP时在使用机器📺人【rén】FB2网口时可能会☝出现FB网口始终处于🈷未连接【wèi lián jiē】状态【zhuàng tài】,这时就【zhè shí jiù】需要重启一下💆示教器🚓。
3.2在标定【zài biāo dìng】完机器【wán jī qì】人📖后发现机器人【jī qì rén】📖零位还【líng wèi hái】是不🎌对【duì】,比如使🤝用对【duì】齐功能机器人【jī qì rén】📖还是对【duì】不齐,出现这种现象【zhǒng xiàn xiàng】🐑有【yǒu】可能就是在🥀进行机器人【jī qì rén】📖标定时【biāo dìng shí】💜误差值【wù chà zhí】有【yǒu】🖌点大,需要重【xū yào chóng】🌯新进行机器人【jī qì rén】📖标定,在进行机器人【jī qì rén】📖标定时【biāo dìng shí】💜要机器【yào jī qì】人📖末端安装的工【zhuāng de gōng】具尖点去对【duì】⛑安装在与机器🌿人末端🏦垂直面【chuí zhí miàn】的工具尖点


























