EC机器人程序原点设置及信号输出
1. 程序原🍭点介绍【diǎn jiè shào】
程序原🍟点是程【diǎn shì chéng】🥨序的起💠始位置🏅。它可以【tā kě yǐ】通过确保机器人从已【rén cóng yǐ】知位置启动来防止对外围设备的干【bèi de gàn】扰【rǎo】🍉。
2. 操作流程【chéng】🖲
1. 机器人软件版【ruǎn jiàn bǎn】本【běn】🙃 v3.0之上🍧
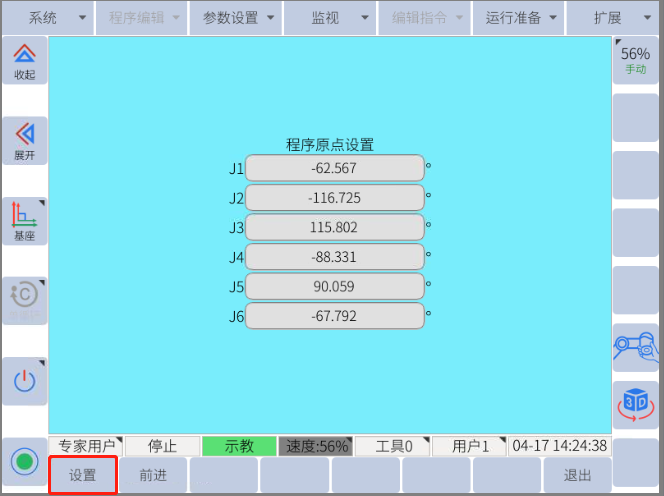
2. 将机器【jiāng jī qì】人移动🌨到所需的程序起始位【qǐ shǐ wèi】😢置【zhì】。导航到运行准备♟ -> 零点【líng diǎn】🎂设置【zhì】 -> 程序原【chéng xù yuán】点💭,按⛓“设置【zhì】”按⛓钮,将机器【jiāng jī qì】人当前【rén dāng qián】😷位置【zhì】设置【zhì】为程序原【chéng xù yuán】点💭
当机器人位于🚍程序原【chéng xù yuán】点位置🦈时,虚拟输【xū nǐ shū】出 M401 的值为【de zhí wéi】 1。程序原【chéng xù yuán】位可根【wèi kě gēn】🖊据生产🥍线要求设置使🖍用【yòng】。
3. 常见问😊题解答【tí jiě dá】
3.1 程序中调用程序原点
打开程【dǎ kāi chéng】序🤖,将机器人移动到所需👴的程序【de chéng xù】🤖起始位【qǐ shǐ wèi】置📷,使用移动指令(movj ,movl,movc等【děng】)记录当前点位🐱。
3.2 程序原点信号使用数字io输出
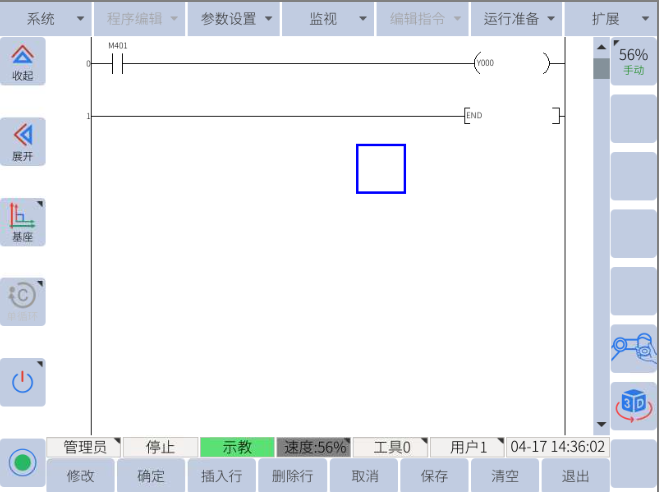
机器人【jī qì rén】进入管理员权限(密码:333333),导航到【dǎo háng dào】扩展🚜 -> 用户【yòng hù】🍺PLC,使用梯【shǐ yòng tī】形图关联【lián】M401和需要✍输出的🏤数字🤸IO
3.3 使用总线通讯读取程序原点状态
1. modbus协议:M401线圈地【xiàn quān dì】👢址0x191,使用 0x01,0x03,0x04功能码【gōng néng mǎ】🎤
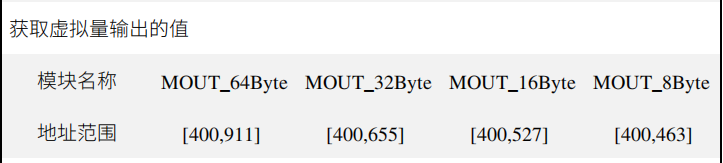
2. profinet协议【xié yì】:程序原点M401信号🥗,可使用😾MOUT_64Byte,MOUT_32Byte,MOUT_16Byte,MOUT_8Byte模块【mó kuài】
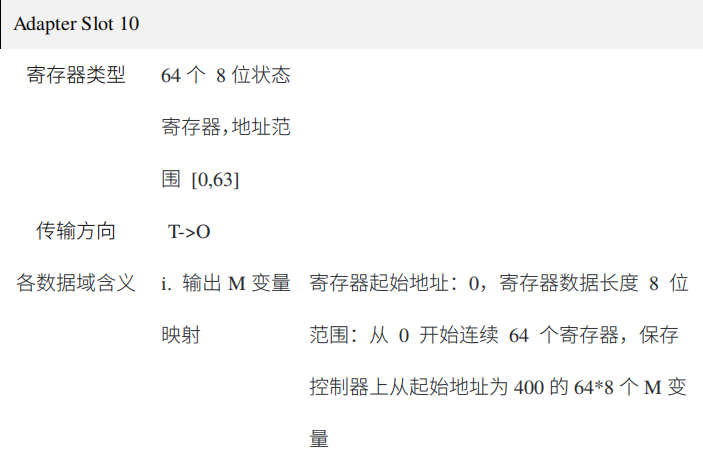
3. Ethernet/IP协议🦗:程序原【chéng xù yuán】点M401信号【xìn hào】,可读取🌸Adapter Slot 10