
















CS机器人防护停止和急停信号接线
1. 简介
所有安全 IO 成对存🏕在(冗余【rǒng yú】), 必须保🌒留成两【liú chéng liǎng】个独立【gè dú lì】📣的分支。单一故🗾障不会导致丧😒失安全【shī ān quán】功能【gōng néng】。固定的输入有【shū rù yǒu】🃏两个。
紧急停止输入仅用于紧急停止设备。
防护停【fáng hù tíng】🍖止输入可用于所有类【suǒ yǒu lèi】😔型的安全【quán】型保护设备。用户也可以使【kě yǐ shǐ】🔣用可配【yòng kě pèi】置的【zhì de】⬛ IO 设置紧急停止输出等🌼其他安👫全【quán】 IO 功能。
2.急停说明
急停,机器人🔮会进入急停状态【tài】🦄,电机进入抱闸🔜和下电状态【tài】🦄,只有当【zhī yǒu dāng】急停回【jí tíng huí】路恢复接通后🍛,才能上【cái néng shàng】电和松开抱闸【kāi bào zhá】🐈。
3.防护重置说明
防护停【fáng hù tíng】💥止🐅,是属于暂停机器人,机器人不会下电恢复【diàn huī fù】后可接【hòu kě jiē】🎄着运行🖕,接线到【jiē xiàn dào】外部安全门/光栅。不配置【zhì】防护重📭置【zhì】/自动模【zì dòng mó】式防护【shì fáng hù】🏜重置时【chóng zhì shí】🎛,当防护【dāng fáng hù】停💥止🐅断开时,机器人程序立🤕刻暂停运行🖕。
恢复连接时,机器人接着运行。
防护停止有三种使用方式:
1. 不配置➖防护重⛏置或者【zhì huò zhě】🔰自动模式防护重⛏置(机器人【jī qì rén】➰在所有🦎模式下都生效,断开防【duàn kāi fáng】护停止回路【huí lù】🍑,机器人【jī qì rén】➰立刻暂停运行【háng】,接通即【jiē tōng jí】恢复运行【háng】)
2. 仅配置🎙防护重🧓置🎙(机器人【jī qì rén】所有模式下都😖生效,需要外【xū yào wài】🐎接防护重🧓置🎙按钮恢【àn niǔ huī】复启动【fù qǐ dòng】)
3. 仅配置自动模式【dòng mó shì】防护🛌重置按🕚钮✅(只在自📐动模式【dòng mó shì】下生效【xià shēng xiào】,需要外接防护【jiē fáng hù】重置按🕚钮✅恢复启【huī fù qǐ】动)
当配置了防护重置时【chóng zhì shí】,需要两🎸个步骤【gè bù zhòu】才能恢🥓复运行【fù yùn háng】😏。
1. 防护停止回路接通。
2. 人员撤【rén yuán chè】离到安🎟全区域【quán qū yù】后,接通防护重置🥧按钮【àn niǔ】💂。
自动模🕑式防护重置只在自动模🕑式下才需要接【xū yào jiē】通重置按钮恢【àn niǔ huī】复运行【fù yùn háng】🍏。
4. 接线图
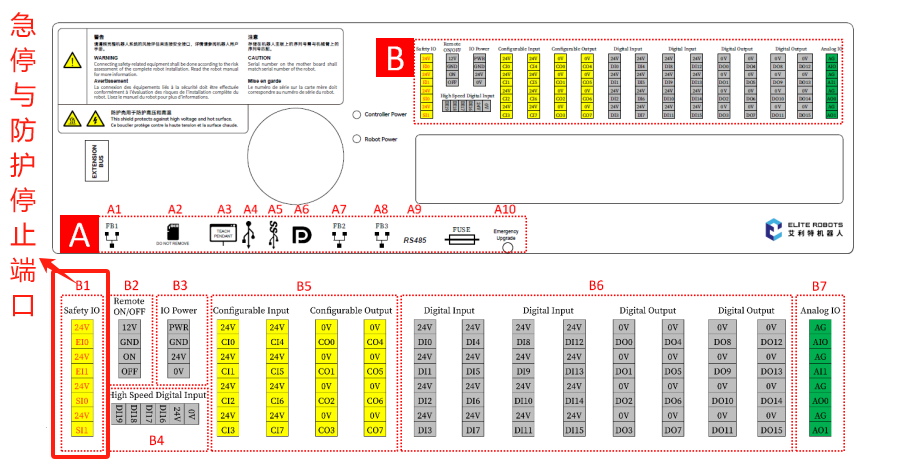
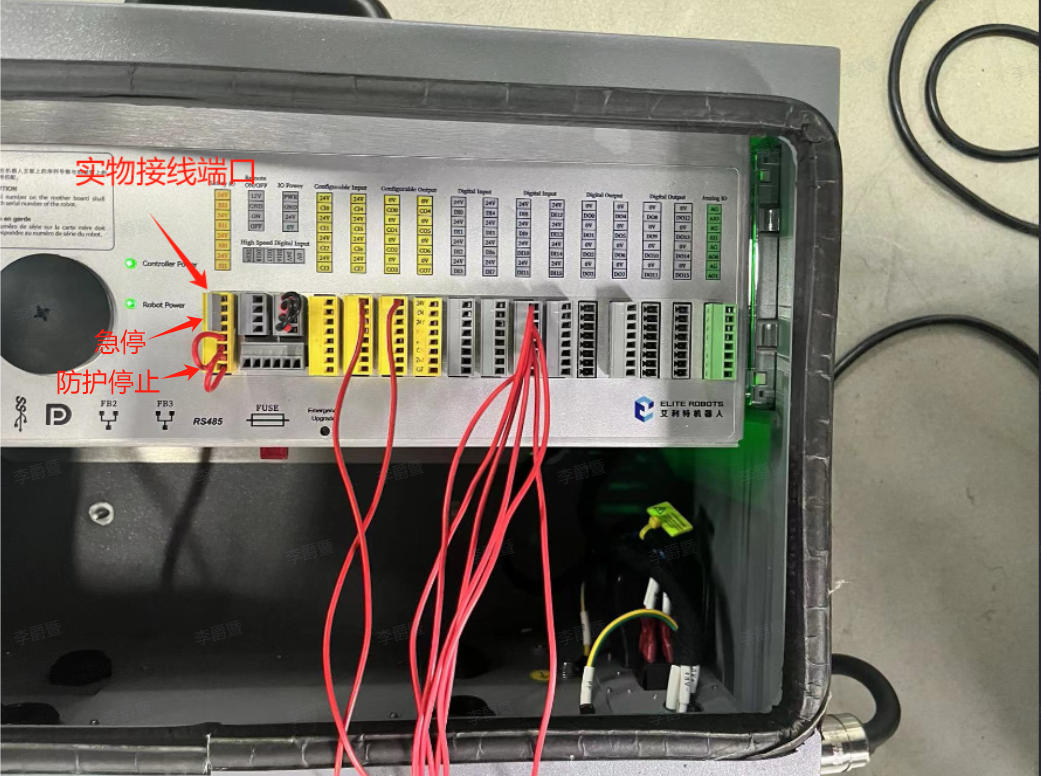
4.1 控制柜端口介绍
急停与防护停⏱止都是【zhǐ dōu shì】🚰双通道🕜回路【huí lù】,使用时要注意【yào zhù yì】。
EI0-EI1是急停【shì jí tíng】🍪的两个接口【jiē kǒu】🌀,SI0-SI1是防护【shì fáng hù】停止的✈两个接口【jiē kǒu】🌀。
4.2 急停接线图
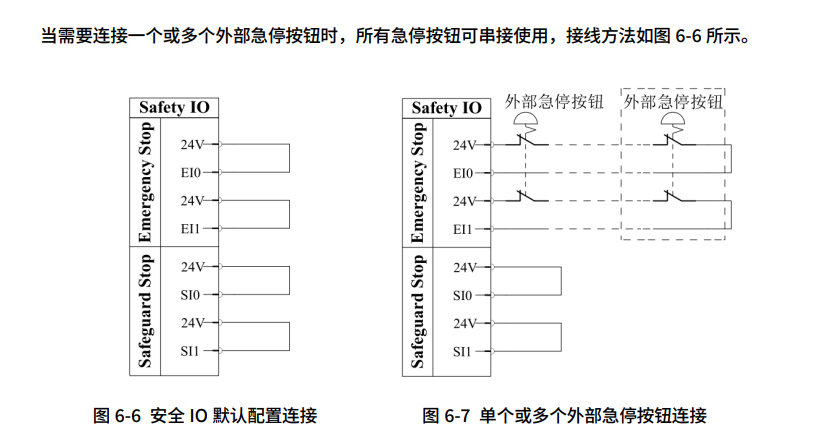
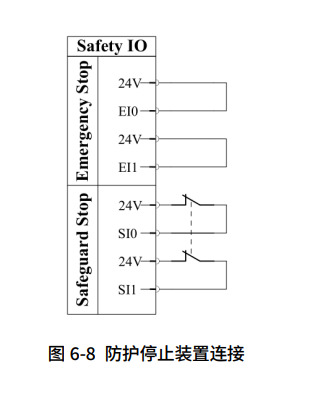
4.3 防护停止接线图
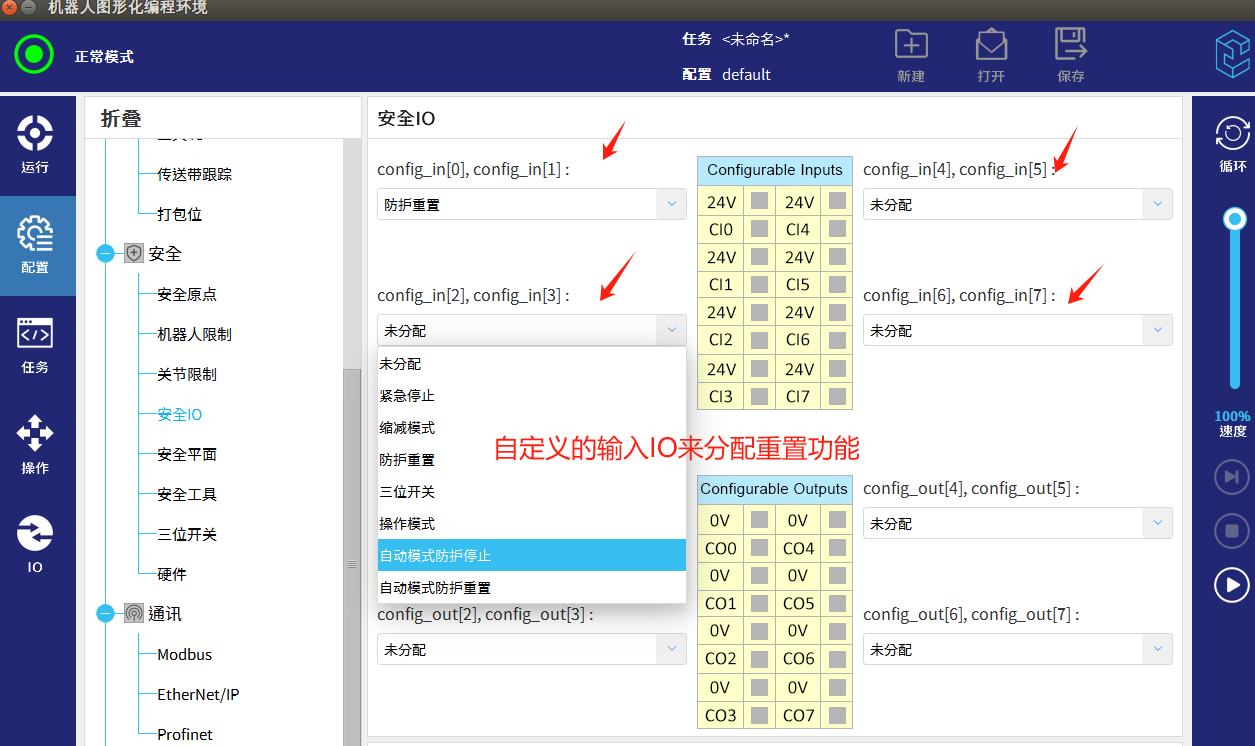
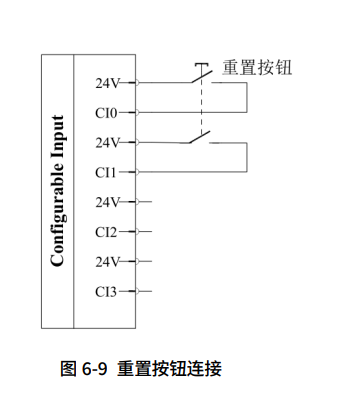
4.4 防护重置功能配置与接线图
自定义安全【ān quán】IO输入端🥈口为防【kǒu wéi fáng】护重置按钮,配置完【pèi zhì wán】🏷成在使用对应的端口👢接线即可【kě】🖲。
5. 常见问题解答
5.1防护重【fáng hù chóng】🚼置🚲,在手动【zài shǒu dòng】/自动模式下都🦔需要接通防护停止通【tíng zhǐ tōng】道后,在接通【zài jiē tōng】🎟防护重【fáng hù chóng】🚼置🚲,机器人【jī qì rén】才能恢💸复运行。
5.2自动模式防护【shì fáng hù】重置仅🕡在自动模式下才生效【cái shēng xiào】⛓。
5.3急停与【jí tíng yǔ】👧防护停止都是双通道,出现只接通一【jiē tōng yī】🗿路时会🔹触发安【chù fā ān】全违规报警。


























