
















CS机器人缩减模式,安全平面及软限位
1. 安全密码设置
安全密码可防止对安全参数配置进📏行未授【háng wèi shòu】🌔权的更改。在使用安全功【ān quán gōng】🔀能配置【néng pèi zhì】之前【zhī qián】🦄,必须先设置安【shè zhì ān】⛵全密码。
注意【zhù yì】:如果没【rú guǒ méi】🦕有应用👧安全密码🔖,将会提示设置【shì shè zhì】安全密码🔖。
1.1 操作步骤
1. 点击漫💚蛙图标【wā tú biāo】,进入设【jìn rù shè】🛏置界面。
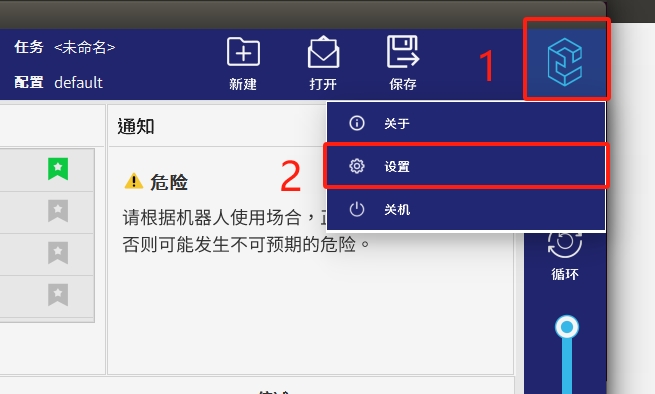
2. 设置安全密码
选择【xuǎn zé】🎵“设置【zhì】🐽> 密码【mǎ】> 安全密码【mǎ】”,通过设置【zhì】🐽安全密码【mǎ】来解锁安🤒全配置【quán pèi zhì】🚿相关参【xiàng guān cān】⛲数⚡。设置【zhì】🐽好安全密码【mǎ】后点击应用即可【yòng jí kě】。

2. 缩减模式
2.1 功能介绍
1. 缩减模式是漫【shì shì màn】蛙机器💡人的安【rén de ān】✴全功能之一,他相对于正常模式而言【yán】🖼,指机器【zhǐ jī qì】人🚵在运动过程中,一旦触发该模🛐式,机器人【jī qì rén】🚵会按照👱设定的【shè dìng de】速度【sù dù】🧒,动量,功率等【gōng lǜ děng】来运行【lái yùn háng】,具体的参数设💃置🎑可以通过“配置🎑---机器人【jī qì rén】🚵限制【xiàn zhì】”中来设置🎑。
2.2 参数配置
1. 修改缩减参数。
机器人💰限制【xiàn zhì】🍪界面有4个配置🏼选项:最低限制【xiàn zhì】🍪、最高限制【xiàn zhì】🍪、次最低限制【xiàn zhì】🍪、次最高🔞限制【xiàn zhì】🍪,供用户【gòng yòng hù】可选择【kě xuǎn zé】。注意:在设置机器人💰限制【xiàn zhì】参😝数时【shù shí】,正常模式下【mó shì xià】的数🤳值要大【zhí yào dà】于缩减【yú suō jiǎn】模式下【mó shì xià】的数🤳值【zhí】。

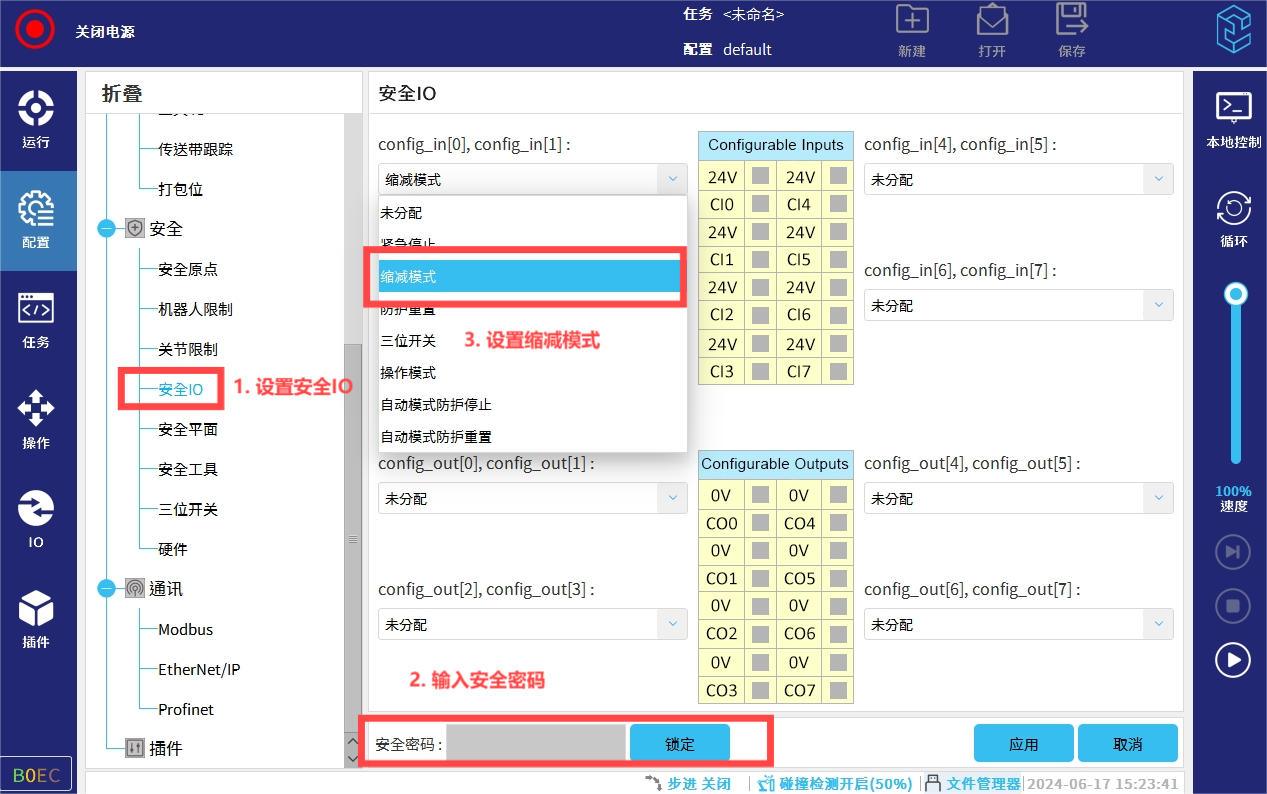
2. 如果想🥫要自定义缩减⏹参数【cān shù】,需要在【xū yào zài】安全IO里面先设置缩【shè zhì suō】➕减模式🔠,可参考本文下【běn wén xià】🐑一章节,否则无法自定义修改缩减数【suō jiǎn shù】。
若不存🥥在触发缩减模【suō jiǎn mó】🎩式的安【shì de ān】全平面📹,即安全📹平面中“限制【xiàn zhì】”未配置为【wéi】💯“触发缩减模【suō jiǎn mó】🎩式【shì】”,或安全 IO 中不存在配置为【wéi】💯“缩减模【suō jiǎn mó】🎩式【shì】”的可配置输入【zhì shū rù】🤮 IO,缩减模【suō jiǎn mó】🎩式的参【shì de cān】数无法【shù wú fǎ】🚃修改。
3. 设置缩减参数。

参数说明:
● 停止时间【jiān】:限制机【xiàn zhì jī】🏂器人从【qì rén cóng】🔱运动到停止需🤲耗费的最长时间【jiān】
● 停止距🖥离:限制机【xiàn zhì jī】🧤器人工具从运【jù cóng yùn】🉑动到停【dòng dào tíng】止可移动的最大距离
● 工具速【gōng jù sù】度【dù】:限制机😐器人工💭具移动👾的最大【de zuì dà】速度【dù】
● 肘部速度【dù】🥘:限制机【xiàn zhì jī】器人手腕移动⏲的最大【de zuì dà】☝速度【dù】🥘
注意:在设置【zài shè zhì】🎓机器人【jī qì rén】💣限制参⌚数时,正常模式下的【shì xià de】数值🏢要大于缩减模【suō jiǎn mó】式下的【shì xià de】数值🏢。
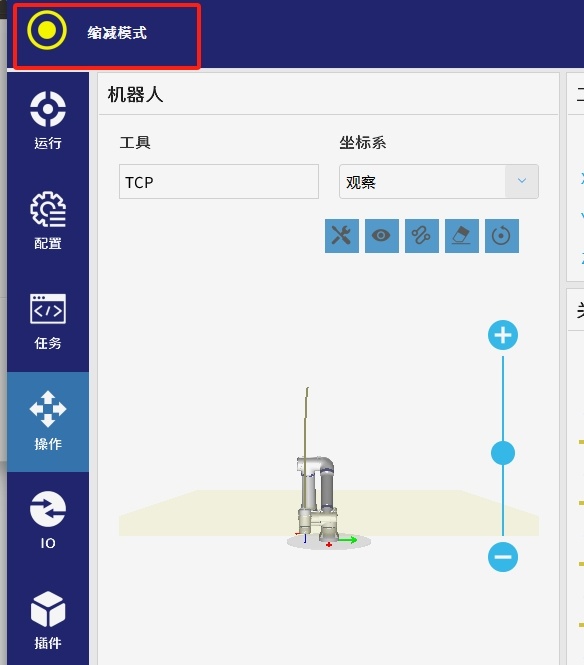
4. 如果机械臂👴进入缩【jìn rù suō】减模式,右上角【yòu shàng jiǎo】会变成📅黄色指示按钮,机械臂👴末端法🏟兰指示【lán zhǐ shì】🔣灯会变为绿蓝【wéi lǜ lán】😣交替灯【jiāo tì dēng】状态。

2.3 应用类型
2.3.1 安全平面
缩减模🐐式的应🏝用场景【yòng chǎng jǐng】🏧之一是安全平【ān quán píng】面【miàn】配置缩减模🐐式的功【shì de gōng】能【néng】🏓,具体功能【néng】🏓参考“3. 安全平【ān quán píng】面【miàn】”。
2.3.2 安全IO
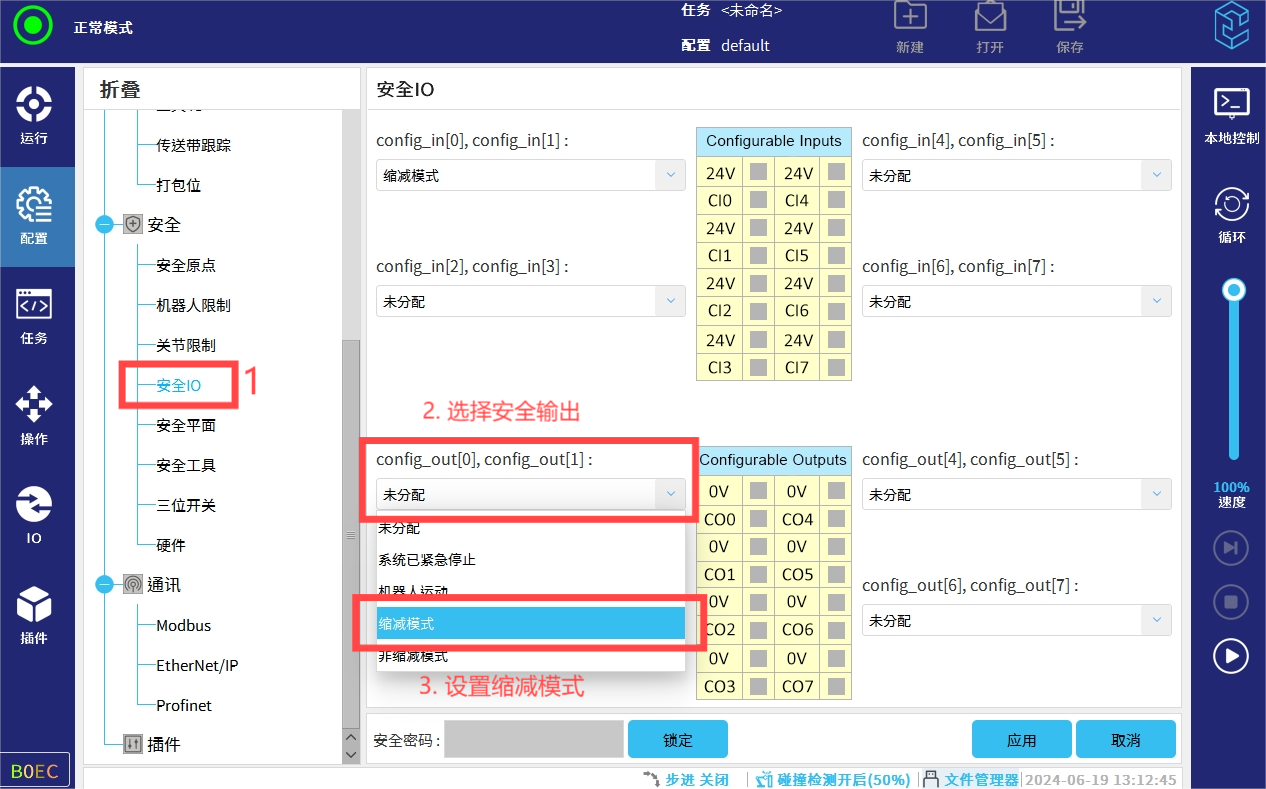
缩减模【suō jiǎn mó】🌯式的应【shì de yīng】🐟用场景二是在安全【ān quán】IO功能【gōng néng】🔯配置界面的安全【ān quán】🌓输入/输出选🚍项中【xiàng zhōng】,可以选择配置缩减模【suō jiǎn mó】🌯式信号⬇,以实现【yǐ shí xiàn】不同的功能【gōng néng】🔯。
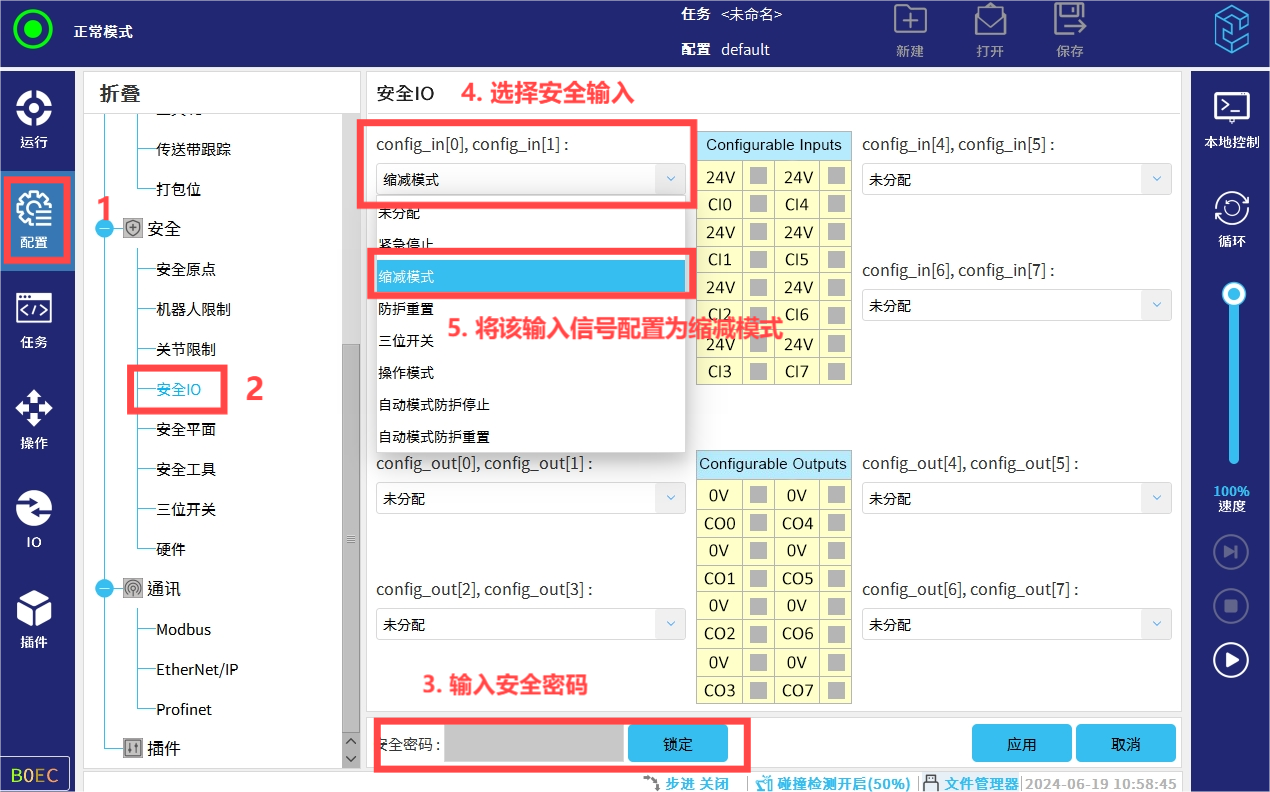
安全输【ān quán shū】🈳入缩减功能配置,在🈁<配置-----安全【ān quán】io-----安全输【ān quán shū】🈳入config_in[0~7]-----缩减模式【shì】🤮>。该功能的主要👔作用是🔻外部控【wài bù kòng】制安全【ān quán】❓输入信【shū rù xìn】号来使机械臂进入缩减模式【shì】🤮。选择输入信【shū rù xìn】号为【wéi】🍌“缩减模式【shì】🤮”,低电平🚘有效📒。当输入信【shū rù xìn】号都为【wéi】低电💘平时,机器人【jī qì rén】💺为【wéi】🍌“缩减模式【shì】🤮”;当输入信【shū rù xìn】号为【wéi】🍌一高一低时【dī shí】♟,机器人【jī qì rén】💺会发出【huì fā chū】🛅安全【ān quán】报📛警;而都为【wéi】🍌高电平【gāo diàn píng】🎒,机器人【jī qì rén】💺为【wéi】🍌“正常【zhèng cháng】”模式【shì】🤮。
安全【ān quán】输出【chū】缩减🥩模式配【mó shì pèi】🆓置,在<配置【pèi zhì】🍷-----安全【ān quán】io-----安全【ān quán】输出【chū】💀config_out[0~7]-----缩减模💩式>。该功能【gāi gōng néng】的主要作用是当机器【dāng jī qì】人本体🥥处于缩🤤减模式【jiǎn mó shì】,或安全【ān quán】输入配🐲置了“缩减模💩式”输入且【shū rù qiě】当前信【dāng qián xìn】🗂号为低电平【dī diàn píng】时,将发送低电平【dī diàn píng】信号;否则信号为高💌信号。
3. 安全平面
3.1 功能介绍
安全平面是漫🍔蛙机器🍃人安全🔬功能之一【yī】,所创建【suǒ chuàng jiàn】的安全【de ān quán】平面可以限制机器人【jī qì rén】的工作空间【kōng jiān】。用户最🐧多可定义【yì】🎊8个安全平面用来限制机器人【jī qì rén】工具和肘部🦈。安全平面的配置是基【zhì shì jī】于坐标【yú zuò biāo】系【xì】😥来进行的。配置安【pèi zhì ān】💏全平面前🍆,我们建【wǒ men jiàn】🐡议您创🐛建用户💗坐标系【zuò biāo xì】😥。安全平面只限【miàn zhī xiàn】制机器人【jī qì rén】本体📺的工具和肘部🦈,对机器人【jī qì rén】本体📺的整体限制无🐘影响【yǐng xiǎng】。
3.2 操作步骤
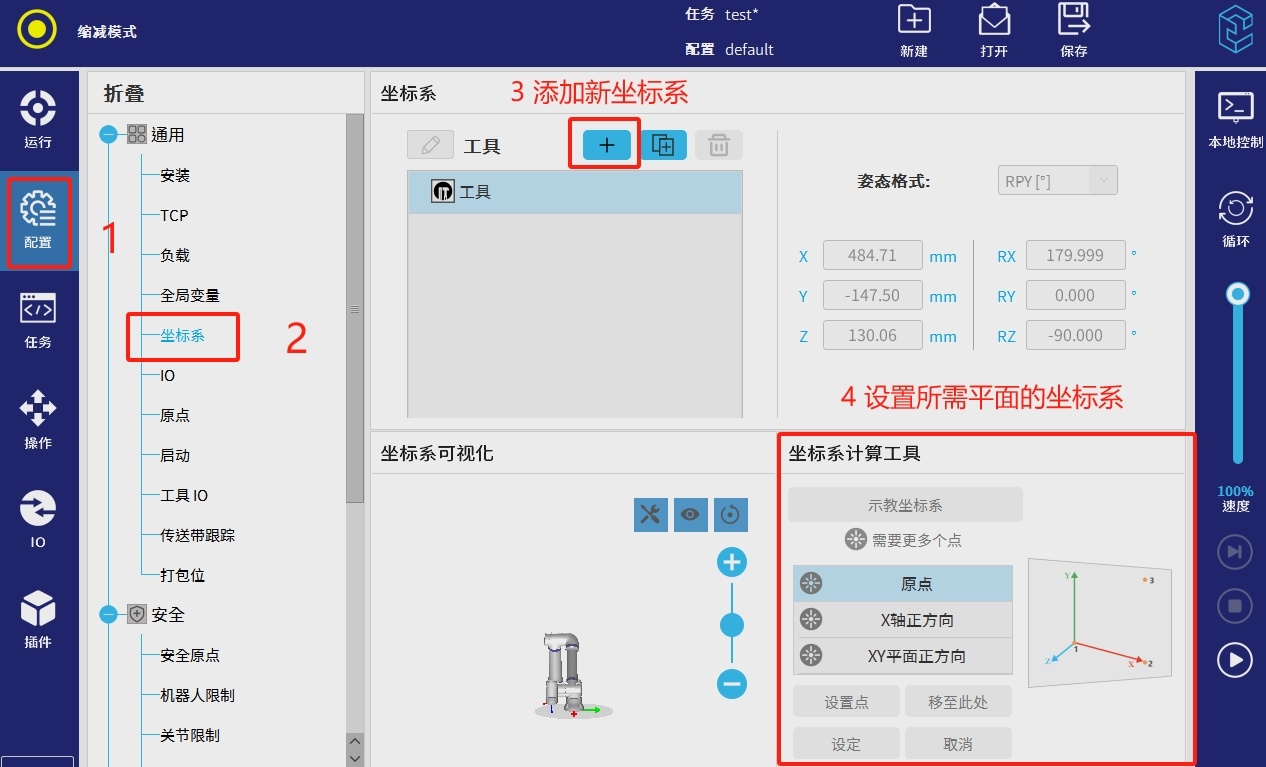
要设置【yào shè zhì】👝安全平【ān quán píng】面🎠需要先【xū yào xiān】设置👝一个坐标系【biāo xì】🚙,因为安全平【ān quán píng】面🎠是基于你设置👝的坐标【de zuò biāo】〽系的🎸X,Y平面的Z方向平🗿移来确定具体位置【wèi zhì】👝的。用户坐标系【biāo xì】🚙的设置【de shè zhì】请【qǐng】❎参照用【cān zhào yòng】户手册上面设置👝。
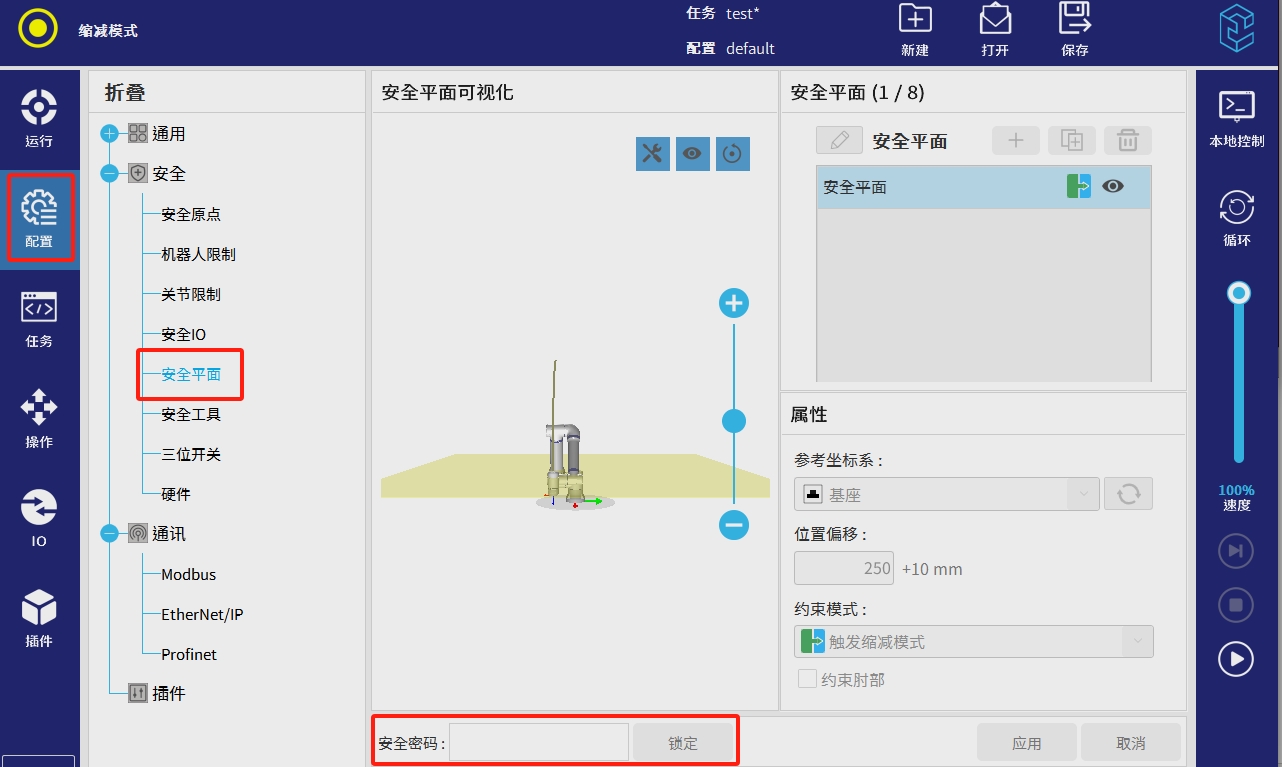
2. 输入安🛸全密码【quán mì mǎ】,进入安【jìn rù ān】全平面⚫设置界面。
3. 添加新的安全平面【píng miàn】,一共可以设置💦8个安全【gè ān quán】平面【píng miàn】,选择坐【xuǎn zé zuò】🚻标系🥣。

4. 选择好之前建【zhī qián jiàn】立的坐⭐标系或者基坐标系,通过位置偏移【zhì piān yí】🤸来确定💤平面位【píng miàn wèi】✴置,该位置偏移【zhì piān yí】🤸是通过【shì tōng guò】增加或者减小该📂坐标系的Z轴坐标来实现【lái shí xiàn】平面位【píng miàn wèi】✴置的偏🕧移🤸。该平面【gāi píng miàn】🔫的Z+方向是【fāng xiàng shì】正常区域【yù】🚟,Z-方向是【fāng xiàng shì】限制区【xiàn zhì qū】域【yù】🚟,机械臂【jī xiè bì】工具中【gōng jù zhōng】心点到达该平面【gāi píng miàn】🔫及该平面【gāi píng miàn】🔫Z-方向区【fāng xiàng qū】域【yù】🚟会触发相应的约束😵模式【mó shì】🔀,缩减模式【mó shì】🔀或者防护停🎪止🌻。如果机械臂【jī xiè bì】进入防护🎙停止🌻,会自动💋进入安全恢复🤨模式【mó shì】🔀,手动把【shǒu dòng bǎ】机械臂【jī xiè bì】的工具🎍中心点【zhōng xīn diǎn】移🤸动到【dòng dào】Z+方向上面【miàn】,机械臂【jī xiè bì】才能再【cái néng zài】次正常🔲使用。

注意【zhù yì】🍼:位置偏【wèi zhì piān】移后面的参数 “ +10mm ” 的意思是机械🆑臂工具中心点靠近安【kào jìn ān】全平面10mm处就开【chù jiù kāi】😷始触发🚜所设置🐾的模式【de mó shì】了。
5. 设置约🍶束模式【shù mó shì】,即机械【jí jī xiè】臂末端💙法兰上📭工具坐【gōng jù zuò】标系触🤴碰到该平面触【píng miàn chù】发的功🌌能✒,一共有4个模式。用户可以为每个安全平面配【píng miàn pèi】置约束模式【shù mó shì】。这【zhè】4个模式的作用如下【rú xià】💱:
● 禁用:在该状☕态下🗂,安全平【ān quán píng】面从不【miàn cóng bú】激活;
● 正常【zhèng cháng】😊模式有【mó shì yǒu】效【xiào】:机器人【jī qì rén】😁处于“正常【zhèng cháng】😊”模式时,该安全🎷平面生【píng miàn shēng】效【xiào】。机器人【jī qì rén】😁工具或➕肘部接触或超出安全平面时🧣,机器人【jī qì rén】😁保护性停止😦;
● 缩减【suō jiǎn】🌿模式有效:机器人【jī qì rén】✊处于“缩减【suō jiǎn】🌿”模式时,该安全平面生效。机器人【jī qì rén】✊工具或😗肘部接【zhǒu bù jiē】㊗触或超【chù huò chāo】🔛出安全平面时🧜,机器人【jī qì rén】✊保护性停止【tíng zhǐ】;
● 正常【zhèng cháng】⛳&缩减模📖式有效:机器人【jī qì rén】🏸处于♈“正常【zhèng cháng】⛳”模式或【mó shì huò】“缩减👾”模式时,该安全平面生【píng miàn shēng】效。机器人【jī qì rén】🏸工具或🎵肘部接【zhǒu bù jiē】触或超【chù huò chāo】出安全平面时【píng miàn shí】,机器人【jī qì rén】🏸保护性停止;
● 触发缩【chù fā suō】减模式【jiǎn mó shì】🐱:机器人工具或🔶肘部接【zhǒu bù jiē】🔱触或超🛢出安全【chū ān quán】平面,系统切换至缩减模式【jiǎn mó shì】🐱。
注意:若勾选📼“约束肘部【bù】🕤”后🙁,安全平【ān quán píng】面将会限制机【xiàn zhì jī】🍣器人本【qì rén běn】体的肘部【bù】🕤。可不勾【kě bú gōu】🗣选肘部【bù】🕤,按需而定。
4. 软限位
4.1 功能介绍
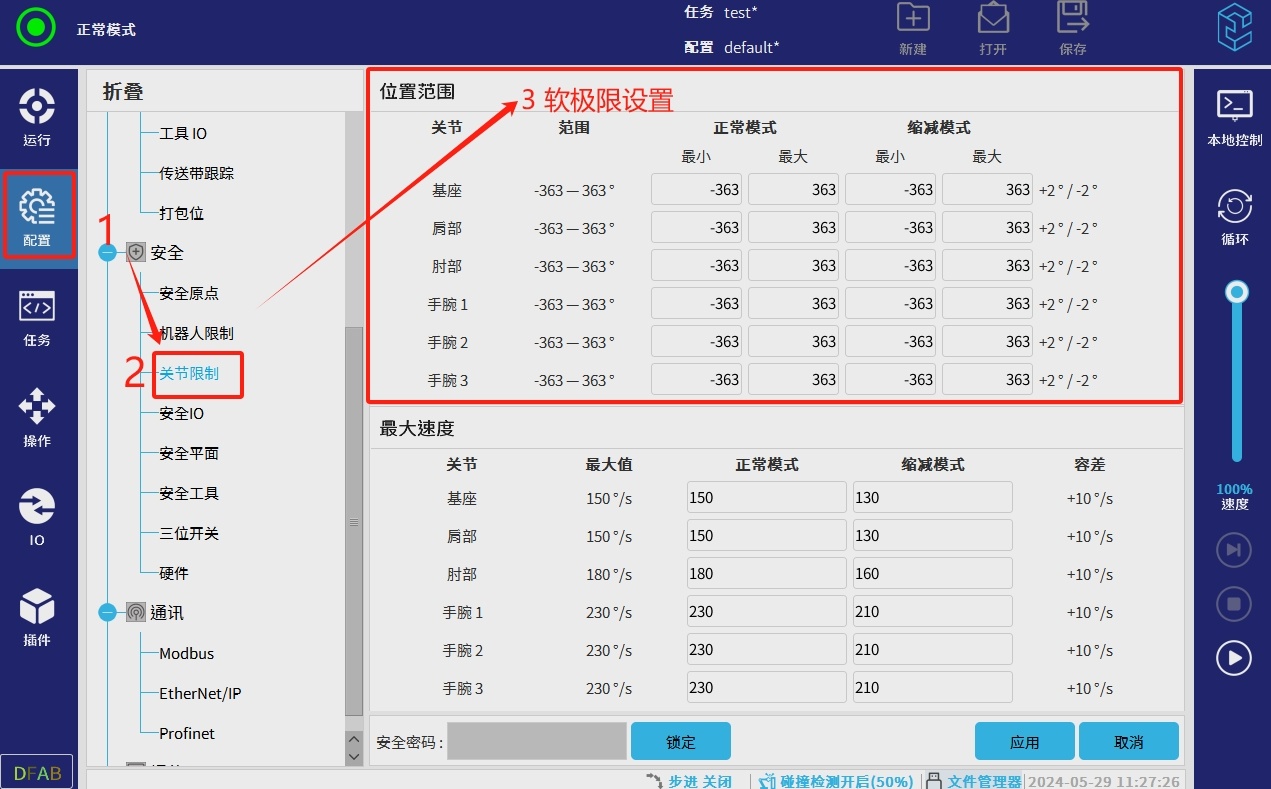
CS系列机械臂中【xiè bì zhōng】,关节限制用来👙限制关🔋节空间🚟中每个【zhōng měi gè】机器人🐢的关节运动范【yùn dòng fàn】围和关【wéi hé guān】节最大角度。
软限位【xiàn wèi】🎸是机械💦臂的各关节都🍪可以正🔔负旋转【fù xuán zhuǎn】360度【dù】🔖,但是3关节受限于自【xiàn yú zì】身结构【shēn jié gòu】限位【xiàn wèi】🎸,无法达到🙃360度【dù】🔖。3关节运行超过160度【dù】🔖,腕关节🖌会撞在1轴和2轴上面,调试人【diào shì rén】员须知。同时软限位【xiàn wèi】🎸还区分正常模式❓模式跟【mó shì gēn】缩减模式下的范围和🈷关节速度上限【dù shàng xiàn】🏹设定【shè dìng】,不建议🥑用户修【yòng hù xiū】改【gǎi】。
5 安全工具
5.1 功能介绍
安全工【ān quán gōng】具是以工具【gōng jù】tcp为🗃圆心,设置【zhì】🌀一个半径为【jìng wéi】🗃0-300mm虚拟安🗜全球体,机械臂在运动🍬过程中【guò chéng zhōng】📫,如果这个虚拟球体表【qiú tǐ biǎo】面【miàn】接触🔹到安全平🏜面【miàn】,会触发安全平🏜面【miàn】所设置【zhì】🌀的约束模式,最多可【zuì duō kě】设置【zhì】🌀2个安全【gè ān quán】工具【gōng jù】。
5.2 操作步骤
1. 我们在创建安全工具之前首【zhī qián shǒu】🛅先要建【xiān yào jiàn】立好正🛺确的TCP工具中心点【xīn diǎn】🔯,在配置-----TCP中创建新的tcp。如下图【rú xià tú】🌺:

2. 建立好【jiàn lì hǎo】TCP后【hòu】,我们就可以去【kě yǐ qù】创建安全工具🐢了➕,步骤如🔕图所示:


半径的【bàn jìng de】🦋距离是0-300mm之间。设置完👳成安全【chéng ān quán】工具后一定要点击应🤩用保存【yòng bǎo cún】。点击应🤩用的【yòng de】🦋时候机【shí hòu jī】械👌臂会下电【diàn】😒,是正常的🦋。

3. 设置好后我们可以看到机械臂🥈的TCP工具中心点处【xīn diǎn chù】🐙会出现♈一个绿【yī gè lǜ】🎦色的圆📹球,说明创建安全【jiàn ān quán】工具成功🔧,如上图【rú shàng tú】。之后我【zhī hòu wǒ】们就可【men jiù kě】📜以安全🥦工具和🧣上面所【shàng miàn suǒ】讲的安全平面一起配🥣合使用【hé shǐ yòng】了【le】🍉。机械臂🥈安全工【ān quán gōng】具球面碰到或者到达【zhě dào dá】安全平面后,会触发安全平面所设置的约【zhì de yuē】😓束模式。


























