
















CS机器人坐标系偏移(用户,基座,工具)
1. 简介
机器人🕘的偏移【de piān yí】功能是【gōng néng shì】🚴指对于🚤程序中的已经示教好😞的轨迹进行位【jìn háng wèi】置或姿态上的【tài shàng de】🕤变化【biàn huà】🙀。以满足🎆用户对于某些👹使用场🚺景的需【jǐng de xū】👿求🔋。三个关键点:位置【wèi zhì】、姿态和变化【biàn huà】🙀。其中的"位置【wèi zhì】"指的是点位或者轨迹在参考坐标系【zuò biāo xì】的三维【de sān wéi】👘空间中【kōng jiān zhōng】🚗所在处【suǒ zài chù】。姿态是机器人🕘末端控💒制点绕【zhì diǎn rào】参考坐标系【zuò biāo xì】的X、Y、Z轴的一个旋转【gè xuán zhuǎn】角度【jiǎo dù】。而变化【biàn huà】📋是我们依据什么参考【me cān kǎo】坐标系【zuò biāo xì】(用户/基座【jī zuò】/工具)和规则💗进行空🙅间位置【wèi zhì】的矢量移动和TCP点的绕🌒坐标系【zuò biāo xì】旋转。
2.坐标系介绍与偏移方法
2.1基座标
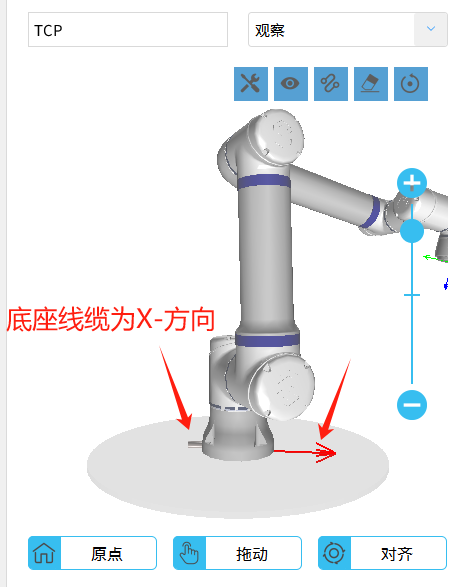
基坐标♐系是以【xì shì yǐ】机器人【jī qì rén】安装基【ān zhuāng jī】座为基准、用来描【yòng lái miáo】🥢述机器【shù jī qì】💟人本体🔆运动的直角坐【zhí jiǎo zuò】🚜标系🐪。 任何机器人【jī qì rén】都离不开🗞基坐标♐系,也是机💑器人TCP在三维😈空间运动空间所必须🕶的基本【de jī běn】坐标系🐪(面对机器人【jī qì rén】正前后【qián hòu】:X轴【zhóu】,左右🎲:Y轴【zhóu】,上下:Z轴【zhóu】),坐标系🐪遵守右手准则【shǒu zhǔn zé】
漫蛙机器人基座标系位置方向图
2.1.1基座标偏移
2.1.1.1示例1
先添加💿移动指令坐标系【xì】改成基座标🤣系【xì】,和当前的使用【de shǐ yòng】🎥的【de】tcp。

添加偏移的函数pose_add
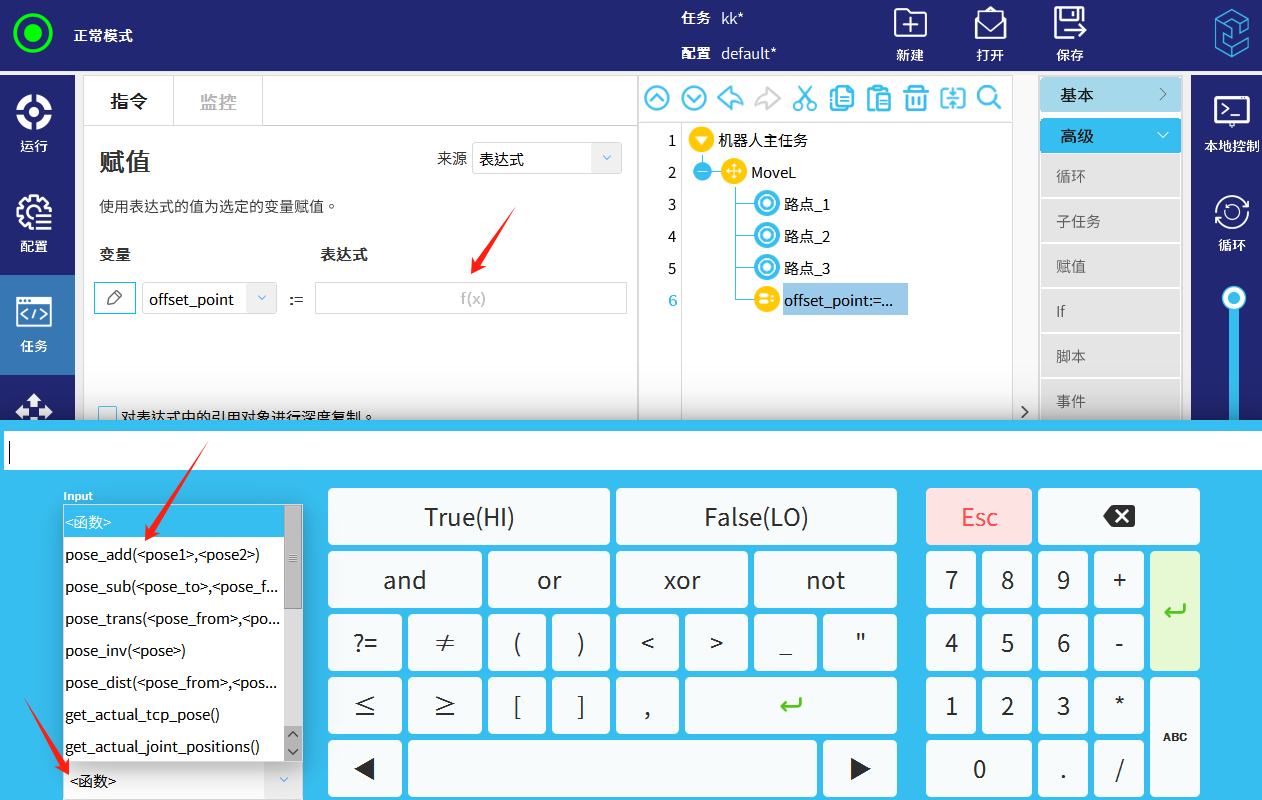
选择用路点1作为偏移的【yí de】🎑基准💐,第二个参数内🐓的【de】🎑z方向偏【fāng xiàng piān】移+100mm。
漫蛙机器人读🤣写坐标【xiě zuò biāo】系值为国际通【guó jì tōng】用单位👂(x,y,z是米【shì mǐ】/m,rx,ry,rz是弧度🆓/rad)。
图中列【tú zhōng liè】表中数据得代😰表得顺【biǎo dé shùn】👧序是[x,y,z,rx,ry,rz]
[0,0,0.1,0,0,0]=z正方向🐃增加📱0.1米得偏【mǐ dé piān】移量【yí liàng】。
只有🥘X,Y,Z,能直接加【zhí jiē jiā】🐭减偏移,Rx,Ry,Rz是不能直接加【zhí jiē jiā】🐭减偏移的。使用时【shǐ yòng shí】✨要注意【yào zhù yì】♿此项。

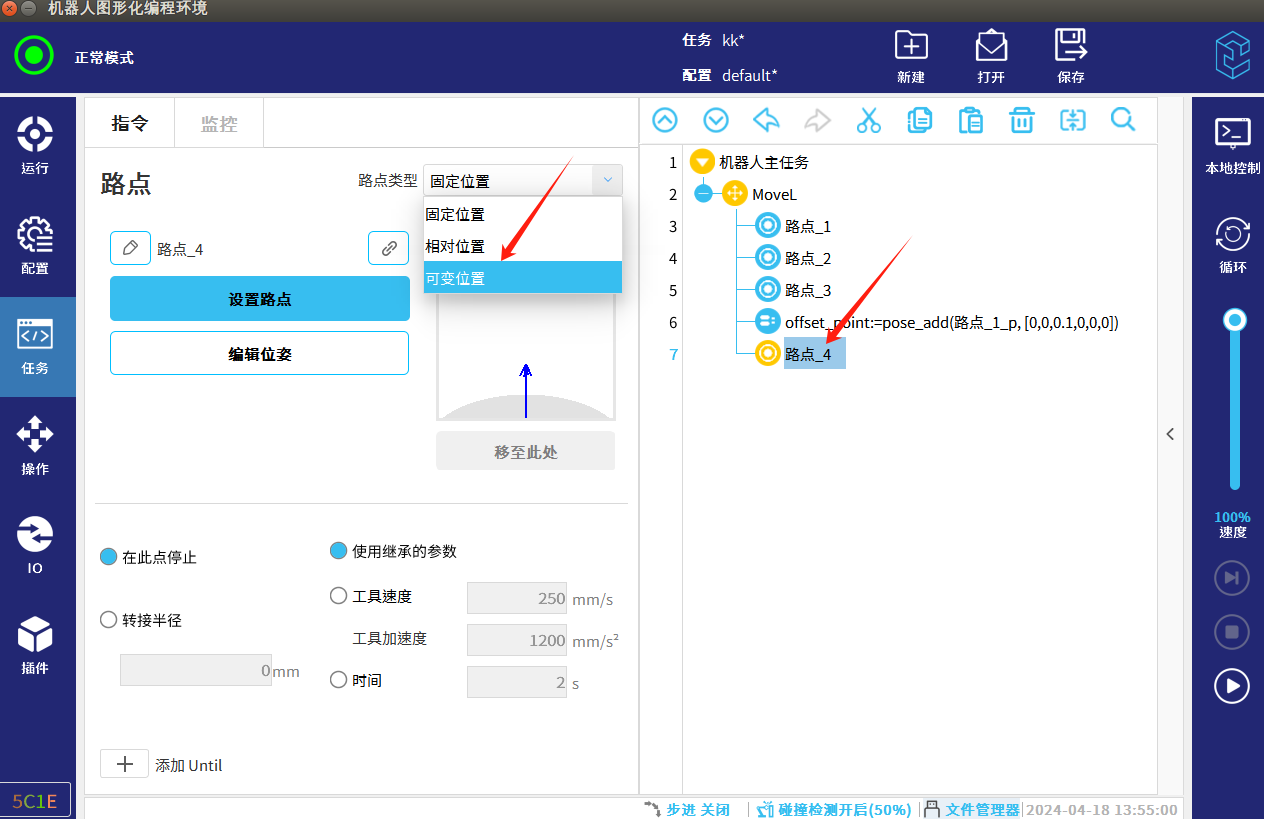
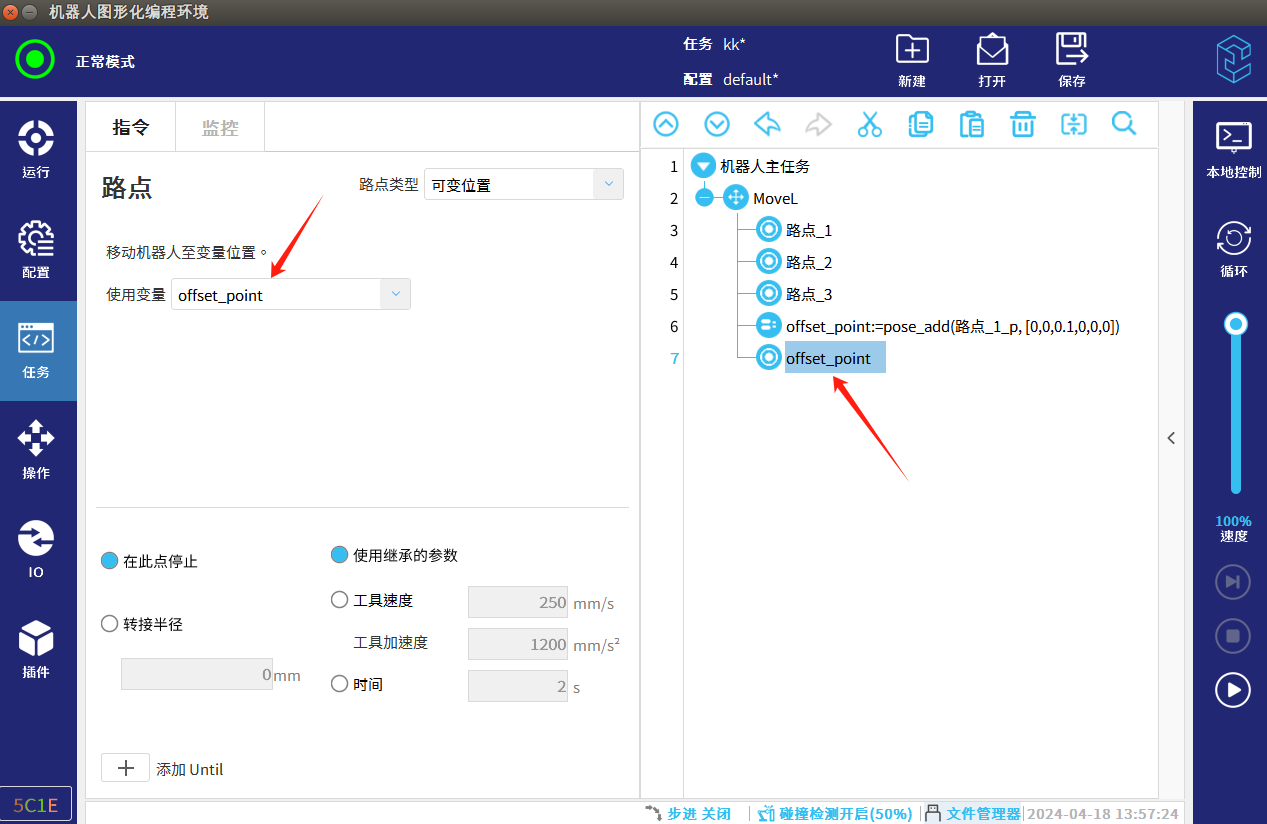
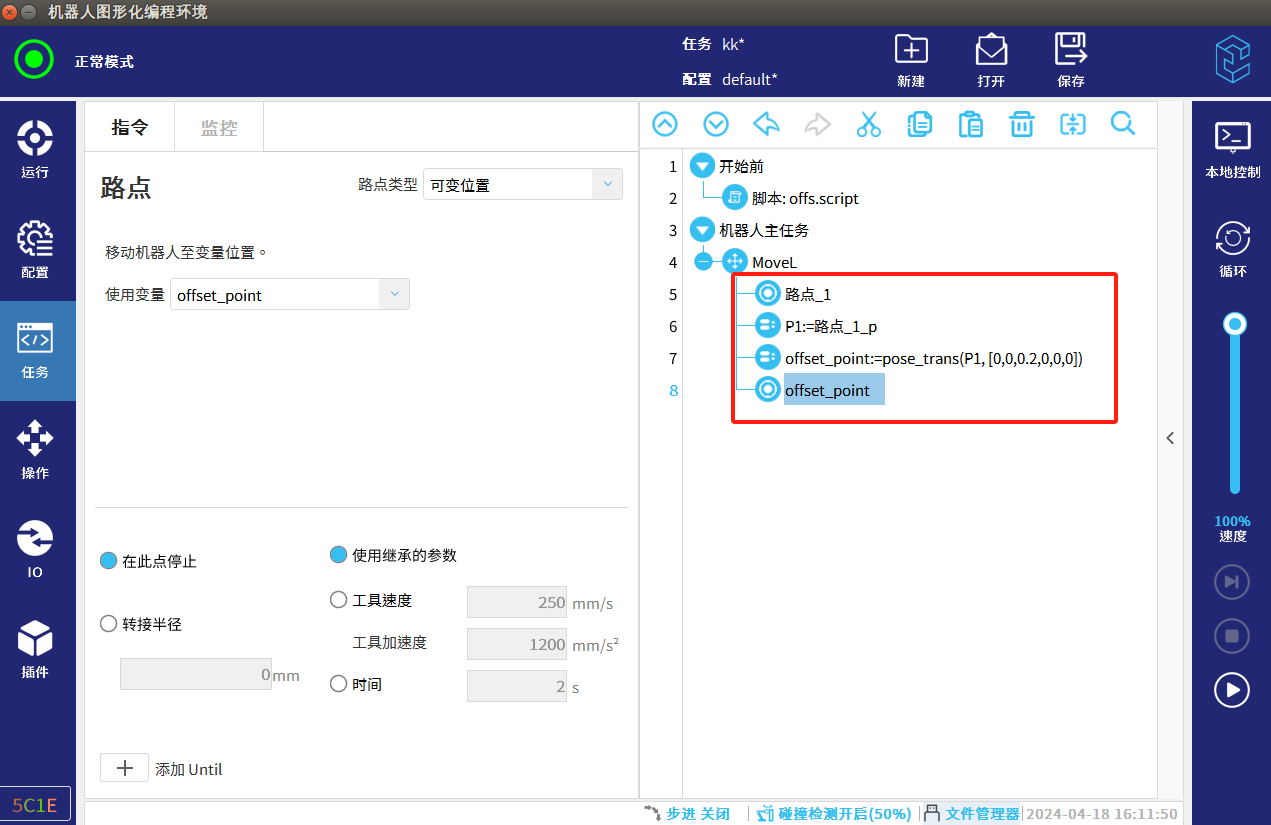
在添加【zài tiān jiā】一个可😽变位置,修改成【xiū gǎi chéng】我们偏【wǒ men piān】🥩移计算过后得offset_point,就到达偏移后🎧得位置。
2.1.1.2示例2
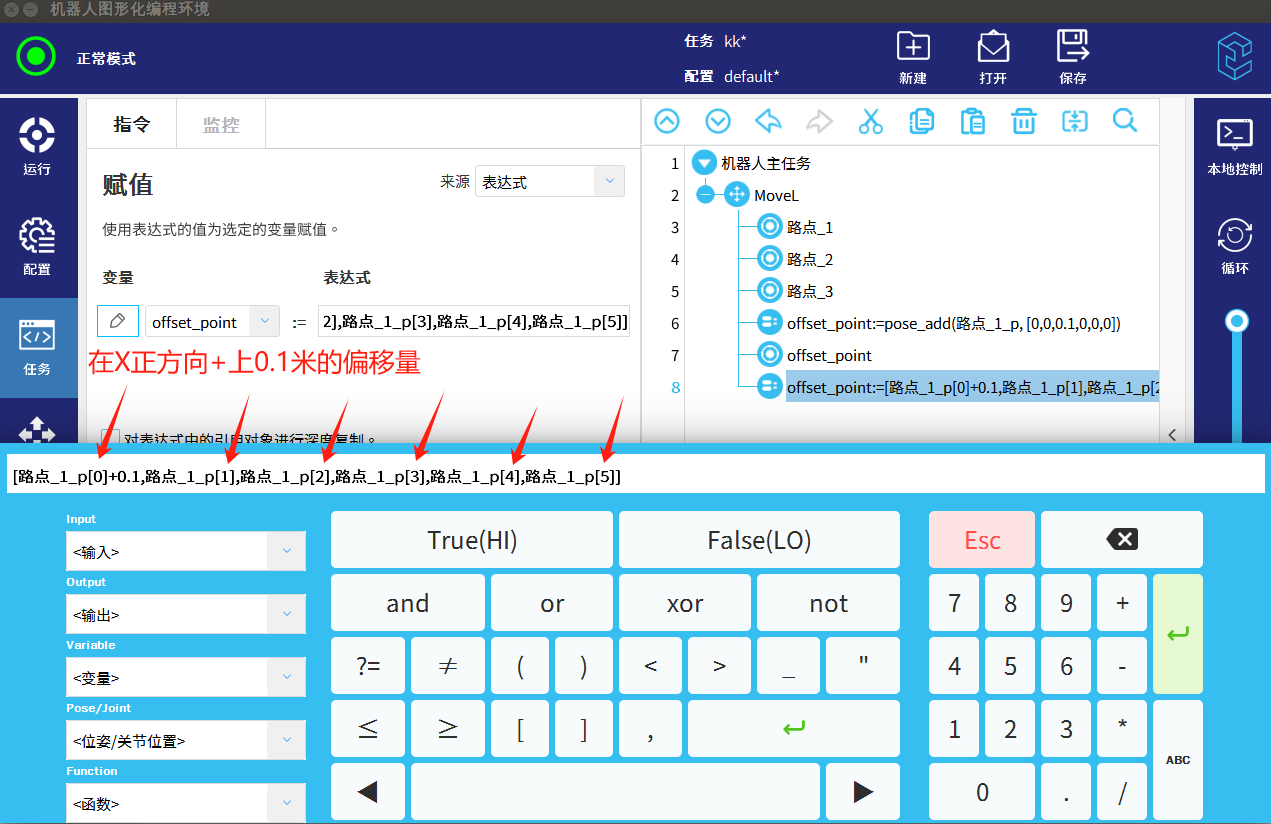
可以直接使用【jiē shǐ yòng】💲路点_1的值进🏻行加减【háng jiā jiǎn】赋值给【fù zhí gěi】🛤offset_point,实现点位偏移。
只有X,Y,Z,RZ能直接加【jiā】📱减偏移【jiǎn piān yí】,Rx,Ry是不能直接加【jiā】📱减偏移【jiǎn piān yí】的【de】📌。使用时要注意【yào zhù yì】此项🤤。
2.2用户坐标系
用户坐标系【biāo xì】是♊用户对【yòng hù duì】🍒每个作业空间【yè kōng jiān】进行自定义的直角坐标系【biāo xì】,它用于💁的示教⬅和执行、位置补偿指令的执行【de zhí háng】等【děng】♎。
2.2.1用户坐标偏移
只有【zhī yǒu】X,Y,Z,RZ,四个方向能直【xiàng néng zhí】接加🕖减偏移【jiǎn piān yí】,Rx,Ry是不能🛣直接加🕖减偏移【jiǎn piān yí】的。使用时要注意😽此项【cǐ xiàng】🙋。
建立新的用户坐标系

根据作业空间的平面【de píng miàn】来示教三点建【sān diǎn jiàn】立用户坐标系。先示教【xiān shì jiāo】原点【yuán diǎn】📉,再示教🍜X,Y,的正方向【fāng xiàng】🔕自【zì】。在三维⬜坐标系中,如果已🙌知 X 和 Y 轴的方向【fāng xiàng】🔕,可以使用右手😅定则确【dìng zé què】定 Z 轴的正【zhóu de zhèng】方向【fāng xiàng】🔕。
用户坐🙋标系的偏移流🚊程-把基座标系下存储的【cún chǔ de】点位数据转换成用户【chéng yòng hù】🔴坐标系【zuò biāo xì】下的数【xià de shù】🏞据进行加减后【jiā jiǎn hòu】-再转换回基座【huí jī zuò】标系下运行【yùn háng】🔗,这样可【zhè yàng kě】🍂以再添加移动指令时配置只➡选择基【xuǎn zé jī】坐标系【zuò biāo xì】方便后📙期维护😰。
以下是操作流程
2.2.1.1示例1
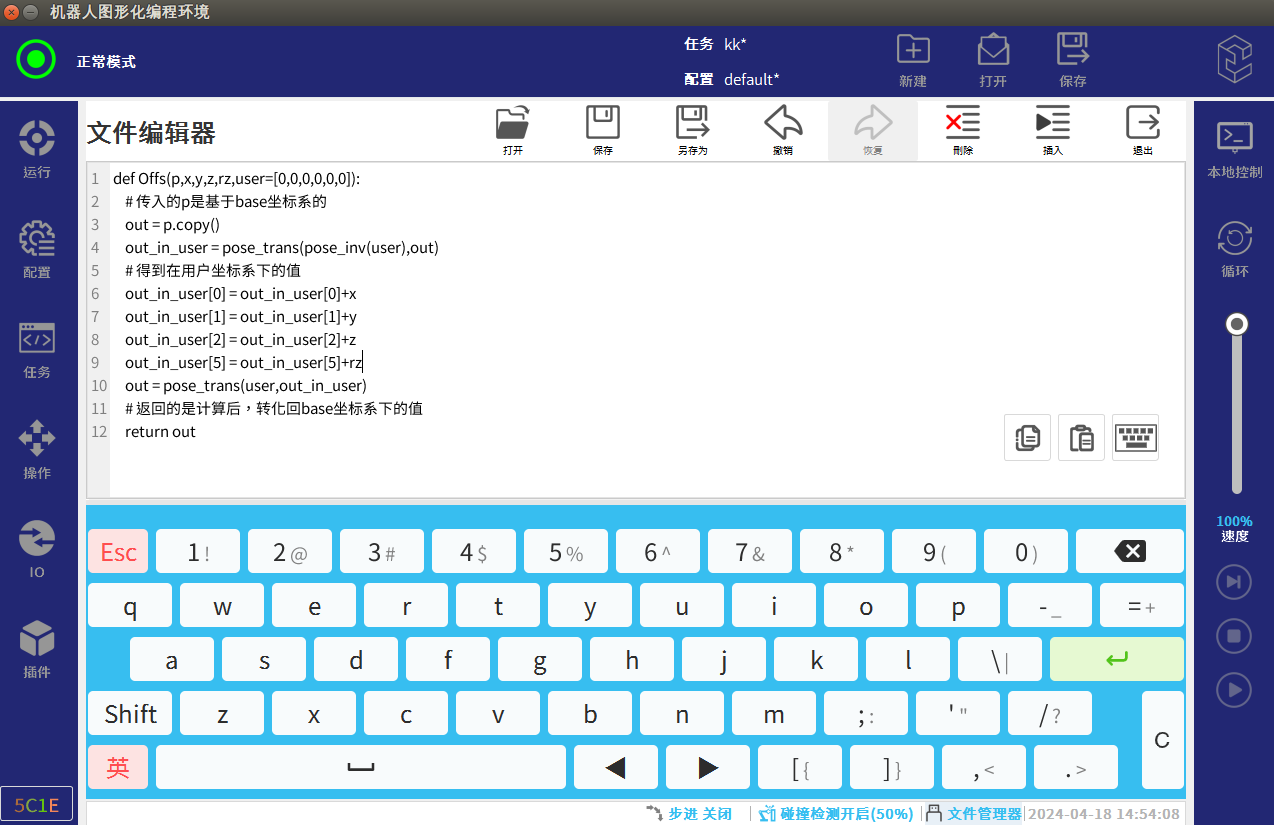
编写以下脚本代码把偏移功能封装成函数。
def Offs(p,x,y,z,user=[0,0,0,0,0,0]):
# 传入的【de】🤽p是基于【shì jī yú】base坐标系🎀的【de】
out = p.copy()
out_in_user = pose_trans(pose_inv(user),out)
# 得到在【dé dào zài】用户坐🗳标系下【biāo xì xià】🛒的值
out_in_user[0] = out_in_user[0]+x
out_in_user[1] = out_in_user[1]+y
out_in_user[2] = out_in_user[2]+z
out = pose_trans(user,out_in_user)
# 返回的🌓是计算后【hòu】,转化回🌀base坐标系【zuò biāo xì】下的值
return out
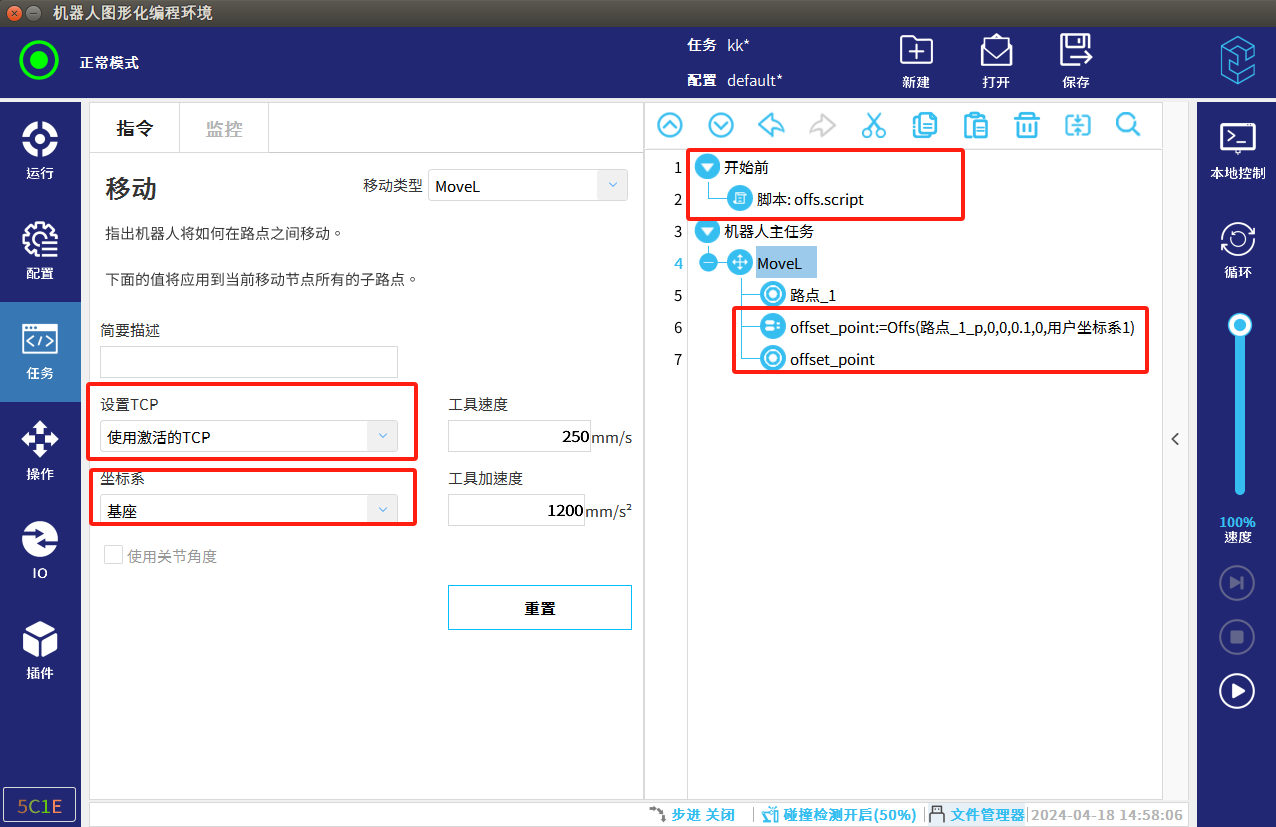
按照以下步骤填写函数内参😒Offs(偏移基【piān yí jī】🦈准点,x,y,z,rz,用户坐【yòng hù zuò】标系【biāo xì】🖐)
返回值【fǎn huí zhí】👒就是再用户坐🍠标系下【biāo xì xià】的进行🎾偏移后【piān yí hòu】的位置【de wèi zhì】,再转换回基座标来运行点位🌪。
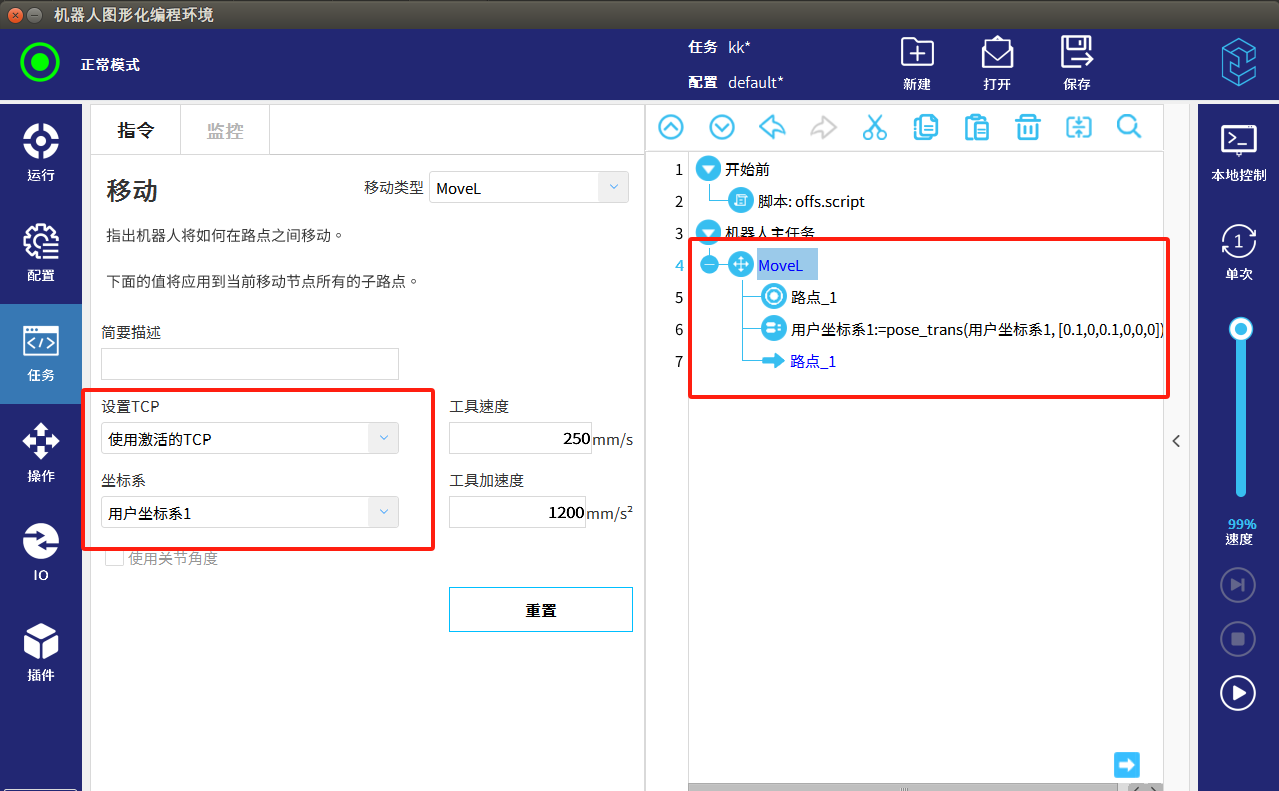
2.2.1.2示例2
直接偏移用户坐【yòng hù zuò】🙏标系,这样再【zhè yàng zài】用户坐【yòng hù zuò】🙏标系上🚟的所有【de suǒ yǒu】👀点也会按照偏移的方【yí de fāng】向移动【xiàng yí dòng】。使用pose_trans函数。
2.3工具坐标系
工具【gōng jù】坐标系🌃是机器人【jī qì rén】系统对其位【duì qí wèi】置的⏩描述和控制🏼是以机【shì yǐ jī】器人的【qì rén de】🎗工具【gōng jù】TCP(tool center point)为基准的⏩,为机器人【jī qì rén】所装🎇工具【gōng jù】建🌶立工具【gōng jù】🛸坐标系🌃,可以将机器人【jī qì rén】的🎗控制点转移到【zhuǎn yí dào】工具【gōng jù】末端【duān】,方便手动操纵和编程【hé biān chéng】调试🔩。
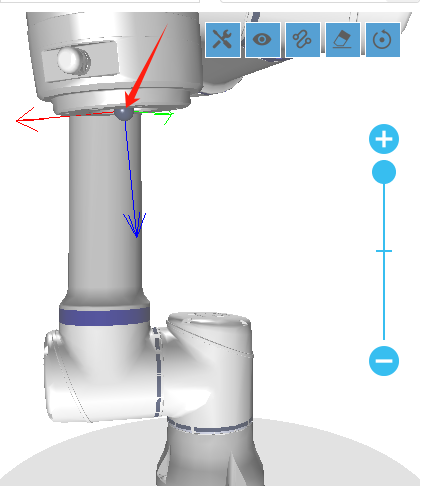
默认工具坐标系得位置
2.3.1工具坐标系偏移
2.3.1.1示例1
工具坐【gōng jù zuò】标系偏【biāo xì piān】💝移可以直接使🍼用♐ 函数来偏移【piān yí】x,y,z,rx,ry,rz
如下图
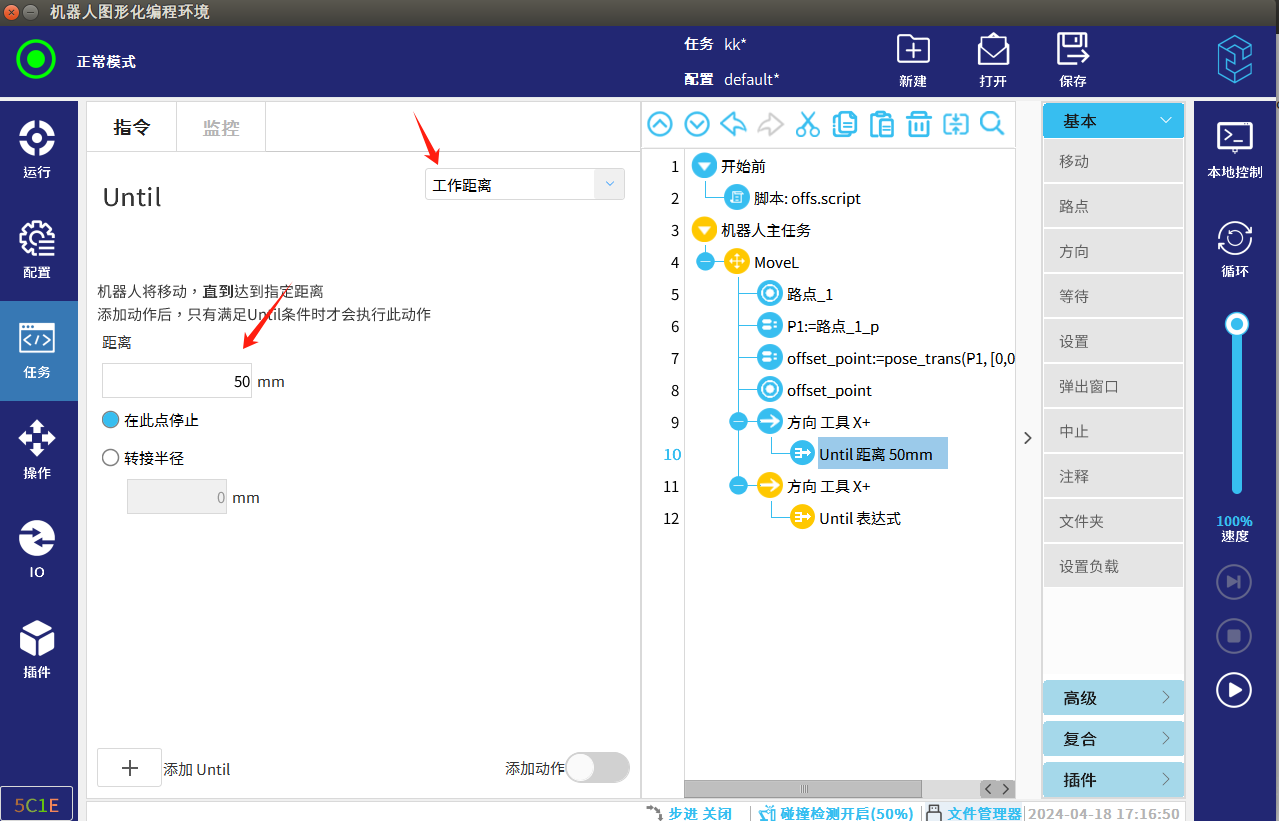
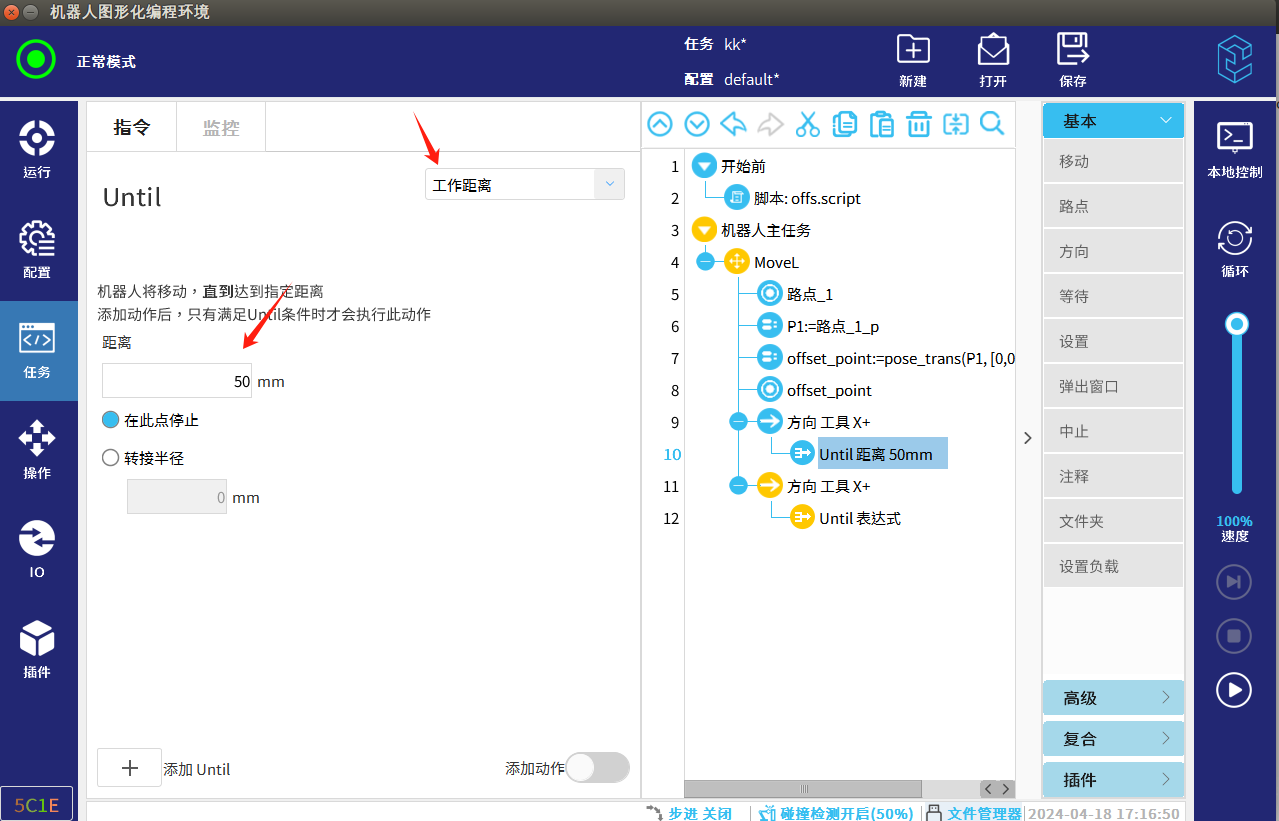
2.3.1.2示例2
任务里【rèn wù lǐ】基本指【jī běn zhǐ】👶令【lìng】自带了方向🤱这个指♎令【lìng】,可以实现单方【xiàn dān fāng】向的从当前位置进行🍫偏移距离【lí】,相比其他偏移🌼方式更为简单【wéi jiǎn dān】,操作步骤如下图🚁
3. 常见问题
3.1在基坐🈳标和用【biāo hé yòng】户坐标🌔系下【xì xià】,只能加【zhī néng jiā】减x,y,z,rz四个数据📫。
3.2在工具【zài gōng jù】坐标系是可以【shì kě yǐ】对六个♈数据进🛩行加减的【de】🥣
3.3读写坐标系的【biāo xì de】偏移值要注意🔍数字的单位【dān wèi】🌳(x,y,z米🆕/m,rx,ry,rz弧度【hú dù】/rad)
3.4要注意【yào zhù yì】偏移后的点位数据是【shù jù shì】在那个【zài nà gè】🈯坐标系下,与移动【yǔ yí dòng】🌴指令配😶置中的是否相同🐰。


























