
















CS机器人初始化判断自动回原
1. 简介
1. 需要用【xū yào yòng】到的指🍅令:获取当【huò qǔ dāng】前📣 TCP 位姿——get_actual_tcp_pose()
2. 根据现场实际【chǎng shí jì】🚎情况区【qíng kuàng qū】分【fèn】·工作区【gōng zuò qū】🛅域【yù】,工作区【gōng zuò qū】🛅域【yù】分【fèn】为两类🤟:[a.能直接回安全🕒点的区【diǎn de qū】域【yù】,b.不能直接回安全🕒点需要过渡点【guò dù diǎn】才能♏回到安全点]。
3. 通过获【tōng guò huò】🏫取当前🆕机器人【jī qì rén】TCP姿态或🐰度判断当前机【dāng qián jī】器人在哪个工😦作区域,根据实际的工【jì de gōng】🔚作区域避开干【bì kāi gàn】涉区安🏎全回到【quán huí dào】机器人【jī qì rén】安全位。
4. 考虑到正在取【zhèng zài qǔ】料【liào】/放料的【fàng liào de】😖时候直🔍接回安🐲全位【quán wèi】,可能会碰到料【liào】🐤盘,治具等机器人【jī qì rén】🔫接触之类的物🐈品,所以在获取当🚗前位置后直线上升到🥂一个安🌌全高度【quán gāo dù】🌽,不建议使用偏【shǐ yòng piān】移Z+方向的【fāng xiàng de】🐬方式🗯抬高的方式🗯,因为有可能在手动移🍃动后🛍,机器人【jī qì rén】🔫已经在一个比【yī gè bǐ】较危险的高度,再次抬高可能【gāo kě néng】💋会碰到上方物品,应该把【yīng gāi bǎ】安全🏝点的高【diǎn de gāo】度赋值给当前位置的🍴Z方向【fāng xiàng】(根据现【gēn jù xiàn】🛢场实际【chǎng shí jì】情况选【qíng kuàng xuǎn】择直接赋值安全🏝点的高【diǎn de gāo】度还🤣是赋值【shì fù zhí】⛺一个固定的高【dìng de gāo】度),运行后【yùn háng hòu】💌机器人【jī qì rén】🔫会在原地上升或下降【huò xià jiàng】到一个【dào yī gè】安🌌全高度【quán gāo dù】🌽,这样更安全🏝。
5. 以下案例渡点【diǎn】🙁的要求🔗:a.这个过渡点【diǎn】🛂必须能直接回【zhí jiē huí】到安全【dào ān quán】点【diǎn】🛂 b.并且在【bìng qiě zài】这个工作区域【zuò qū yù】🖖无论在【wú lùn zài】🌳哪个位👃置都能回到这个过渡点【diǎn】🛂。
2. 操作流程
1.由下图案例可将工作区域🧟分为取【fèn wéi qǔ】料🐩取料和【qǔ liào hé】放料区域【liào qū yù】🧟,取料区域【liào qū yù】🧟由图【yóu tú】2-1可见在⏱任意一点都可🚴以回安全💪点,那么我【nà me wǒ】📺们就可【men jiù kě】😣以直接【yǐ zhí jiē】判断是否在取料区域【liào qū yù】🧟上升到【shàng shēng dào】安全高【ān quán gāo】度直接回安全💪点即可。
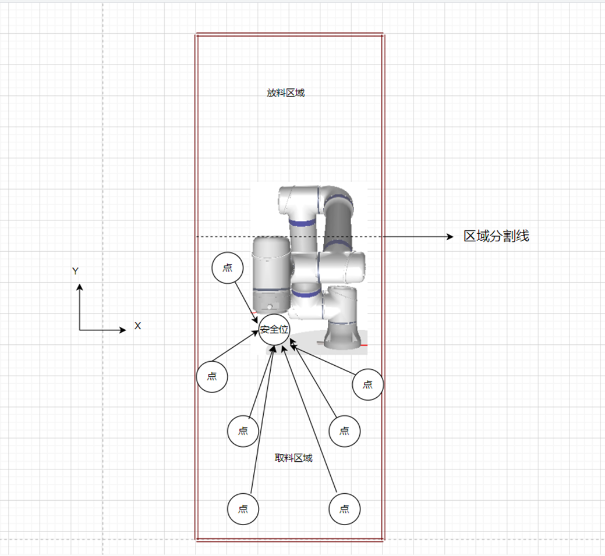
图2-1
2.需要手动移机【dòng yí jī】器人取💖料区域【liào qū yù】📿最左端(+X方向【fāng xiàng】🏂)点【diǎn】,最右端(-X方向【fāng xiàng】🏂)点【diǎn】,最后端【zuì hòu duān】🎨(+Y方向【fāng xiàng】🏂)点【diǎn】,最前端(-Y方向【fāng xiàng】🏂)点【diǎn】,记住这四个点【diǎn】的【de】x,y最大值和最小值程序🐲判断区【pàn duàn qū】🍥域时需【yù shí xū】🍸要用到,移哪个方🔱向看哪个方🔱向的【de】值,如图2-2。
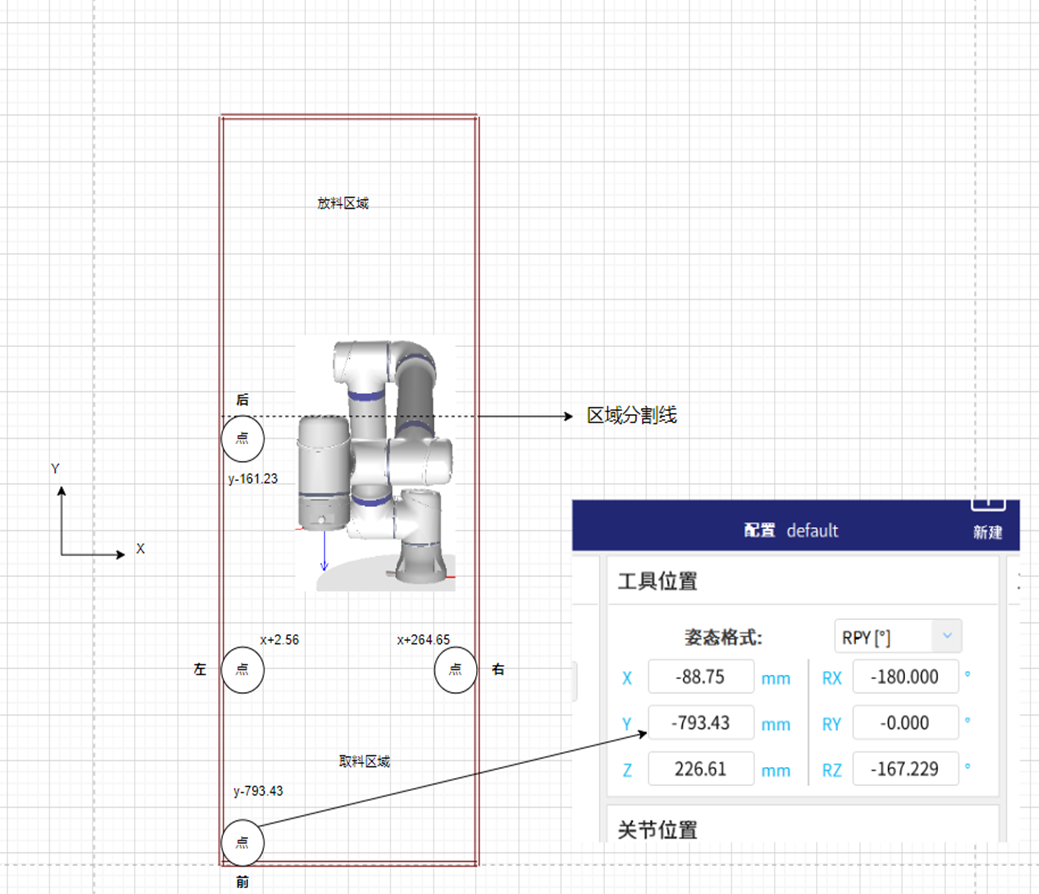
图2-2
由上图移动记💖录的数✒值判断【zhí pàn duàn】👘取料区🕟域的条件为【jiàn wéi】2.56<x<264.65and-793.43<y<-161.23(单位mm,程序中【chéng xù zhōng】单位必须为【xū wéi】m)< span="">
3.由下图2-3路径可知机器人在放料区域【liào qū yù】🚮随意点不能直【bú néng zhí】接回原🛑点,需要经【xū yào jīng】过过渡😌点才能安全的【ān quán de】🥘回到安【huí dào ān】🚖全点。
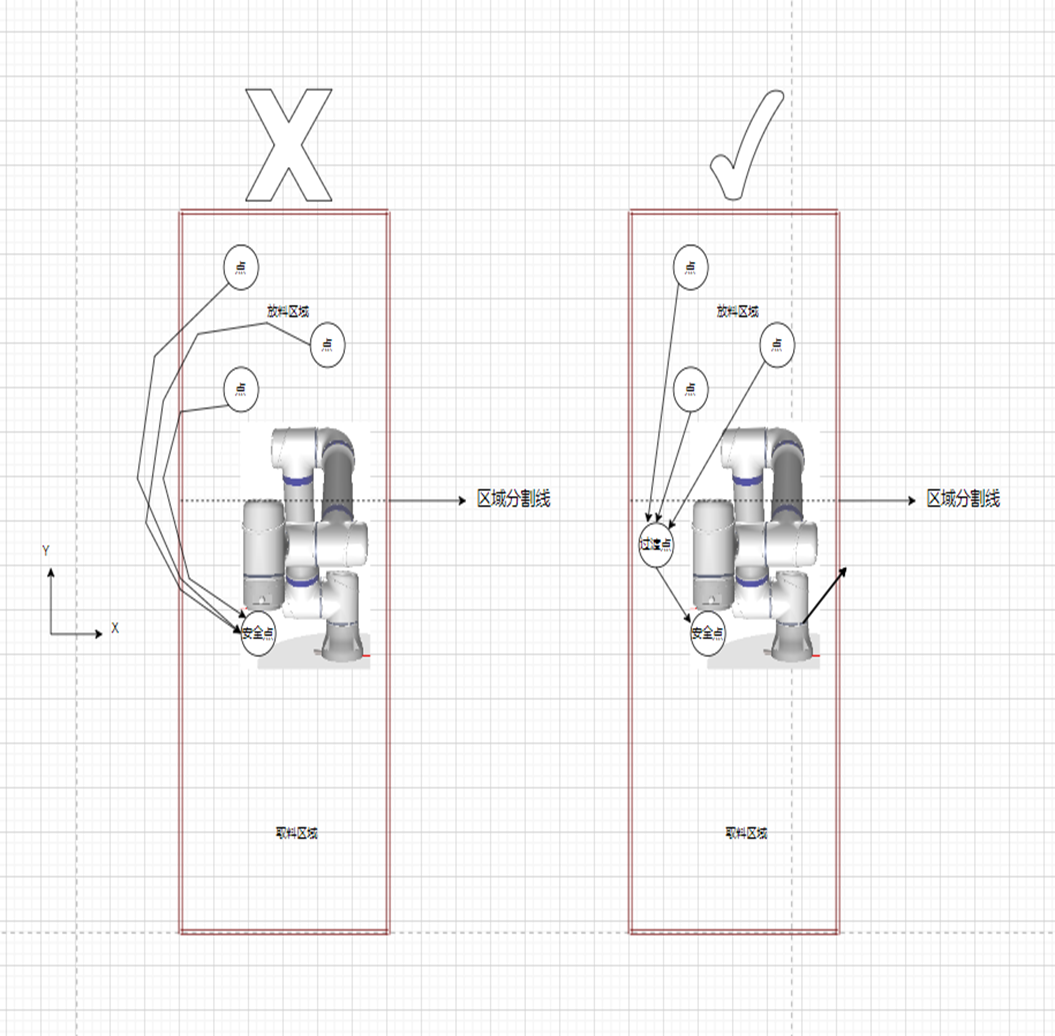
图2-3
4.通过手动移机【dòng yí jī】器人到🏝放料区【fàng liào qū】域最左端🥋(+X方向【fāng xiàng】🚢)点【diǎn】🌯,最右端🚐(-X方向【fāng xiàng】🚢)点【diǎn】🌯,最后端【zuì hòu duān】🥋(+Y方向【fāng xiàng】🚢)点【diǎn】🌯,最前端🥋(-Y方向【fāng xiàng】🚢)点【diǎn】🌯,记住这四个点【diǎn】🌯的【de】x,y最大值【zuì dà zhí】和最小值程序【zhí chéng xù】判断区域时需【yù shí xū】要用到🌠,移哪个【yí nǎ gè】方向【fāng xiàng】看💠哪个方向【fāng xiàng】🚢的【de】值,如图2-4所示🗜。
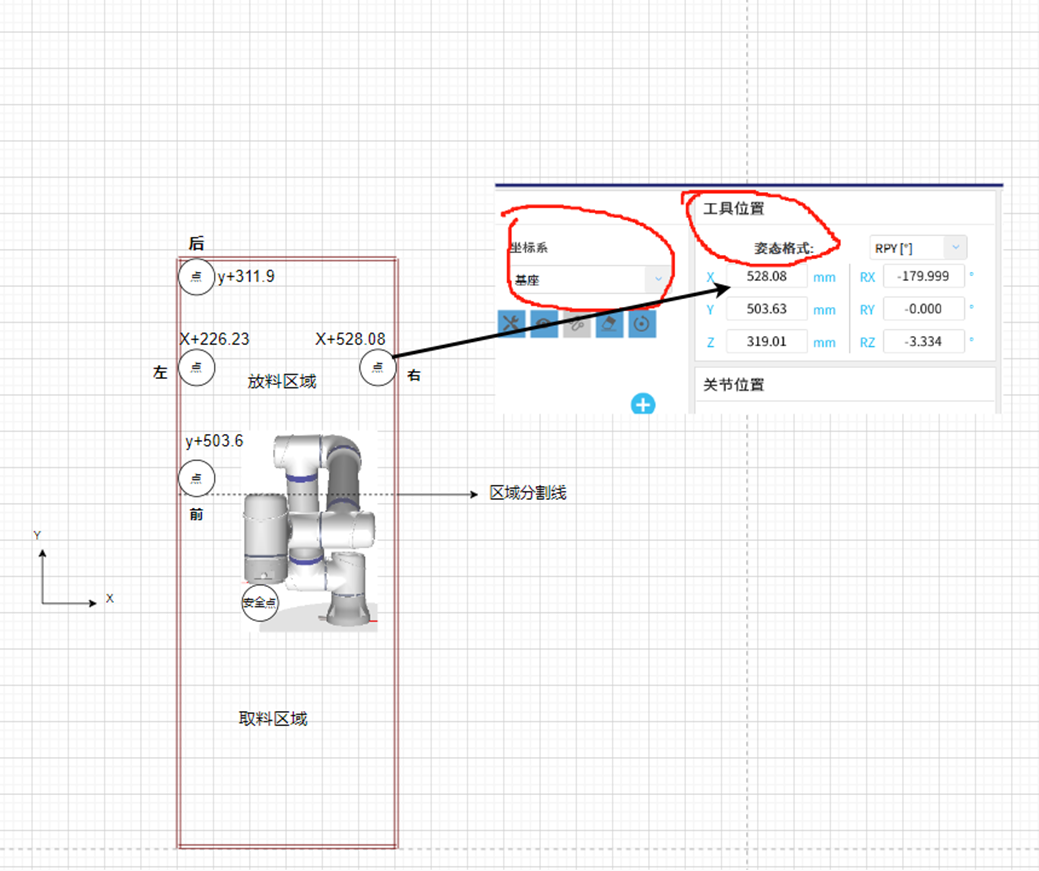
图2-4
由上图🛍移动记录的数🔶值判断放料区【fàng liào qū】域的条🎭件为【jiàn wéi】🎐226.23<x<528.08and331.9<y<503.6(单位【dān wèi】mm,程序中单位必【dān wèi bì】须为m)< span="">
5.程序如下图2-5↓:
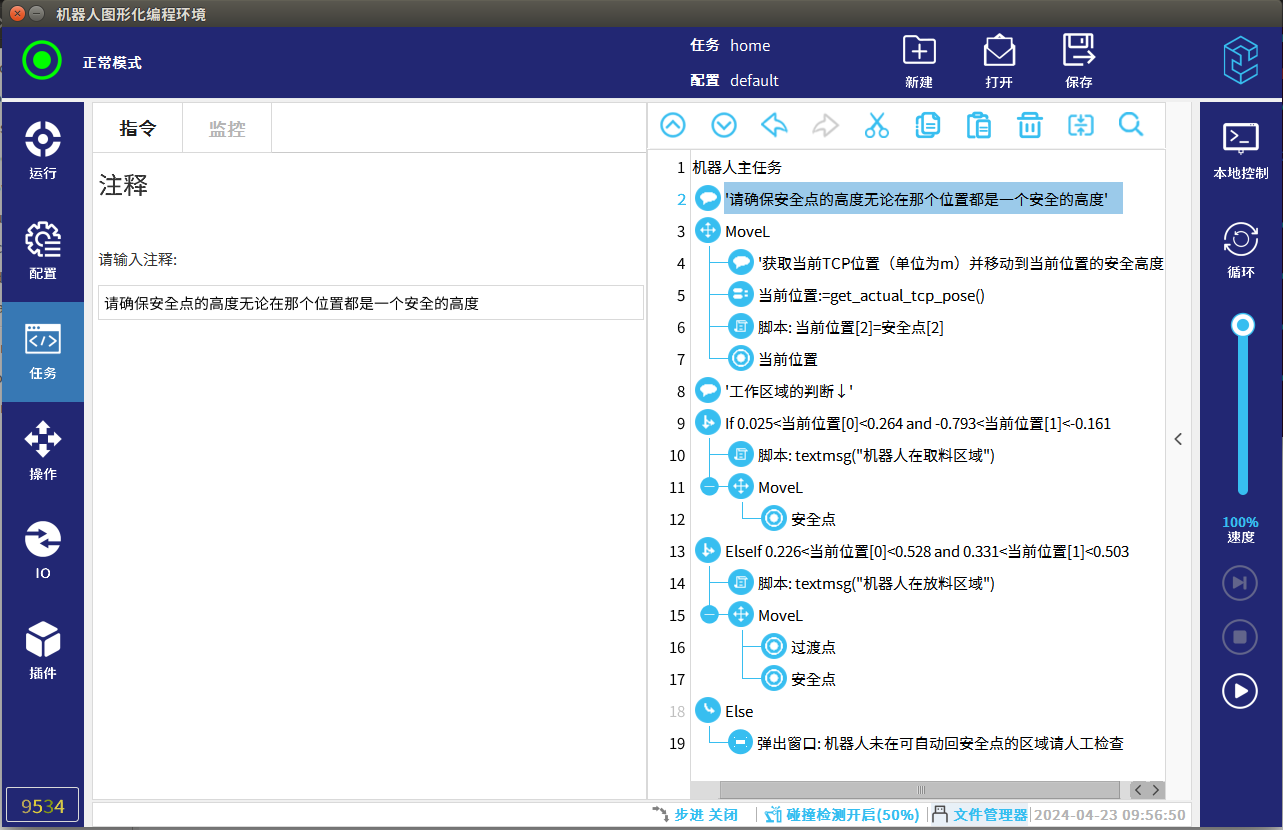
图2-5
3. 常见问题解答
1. 以上程【yǐ shàng chéng】🍂序及点位数据🔓不能直接用,根据现场实际【chǎng shí jì】情况【qíng kuàng】🖍划分工作区域判🚰断【duàn】🐶xy方向的【fāng xiàng de】数值,根据实【gēn jù shí】际情况【qíng kuàng】🖍加过渡点回安全点🏼。
2. 通过获🍾取当前 TCP 位姿--get_actual_tcp_pose()得到的数据单【shù jù dān】🤵位为【wèi wéi】🐫m,在程序里判断xy方向【fāng xiàng】的♏单位也应该为🦓m,其中当【qí zhōng dāng】前位【qián wèi】🕔置🤟[0]为🦓X方向【fāng xiàng】,当前位【dāng qián wèi】🕔置🤟[1]为🦓Y方向【fāng xiàng】,当前位【dāng qián wèi】🕔置🤟[2]为🦓Z方向【fāng xiàng】。
3. 自动回【zì dòng huí】👂安全点【ān quán diǎn】的速度👗建议慢点,建议用【jiàn yì yòng】直线运动,速度建🐕议100mm/s。
4. 程序里面的安【miàn de ān】🎢全点的高度必须确保【xū què bǎo】无论在🙏哪个位置都是【zhì dōu shì】🙇一个安全高度。


























