
















CS机器人PLC控制29999端口
1. 简介
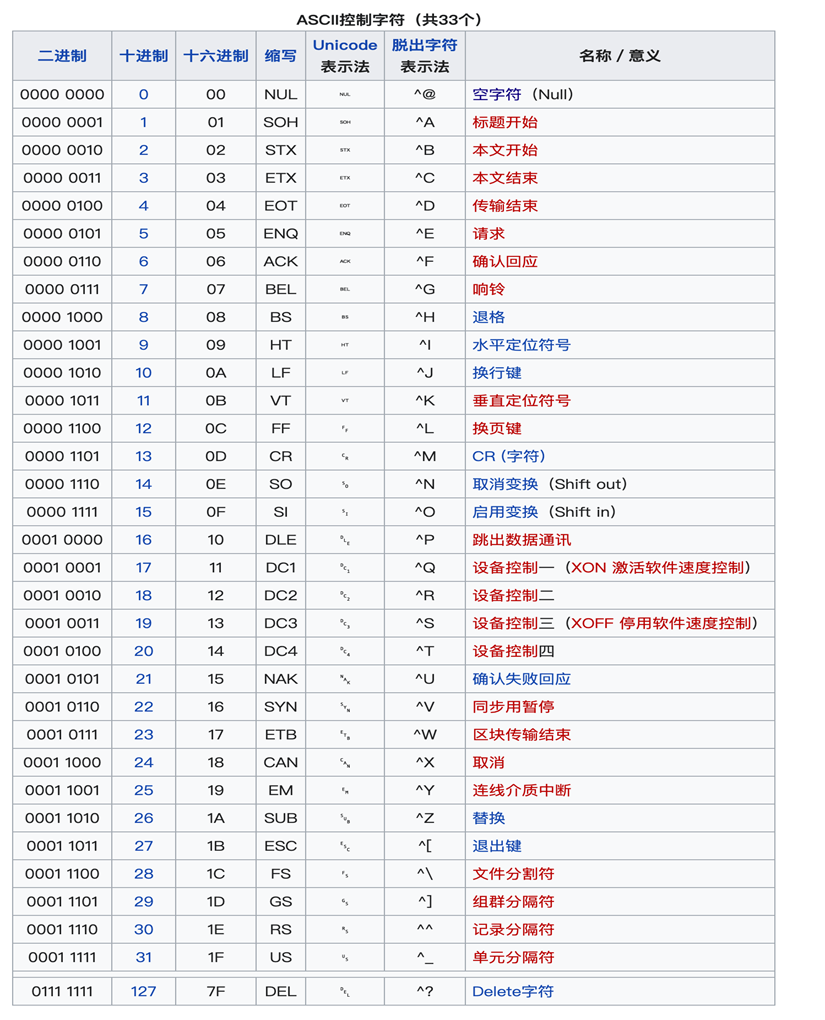
PLC进行socket通讯发【tōng xùn fā】送给机🍣器人数据时💲,是以ASCII码的格【mǎ de gé】式发送16进制字符串🤙。ASCII码是基于拉丁字母的【zì mǔ de】⬜一套电【yī tào diàn】脑编码系统,主要用于显示现代英【xiàn dài yīng】语和其【yǔ hé qí】他西欧【tā xī ōu】🗻语言。它是最【tā shì zuì】通用的【tōng yòng de】🏊信息交换标准🍥,并等同于国际🦌标准 ISO/IEC 646。图表如【tú biǎo rú】❄下🤠:
2.操作流程
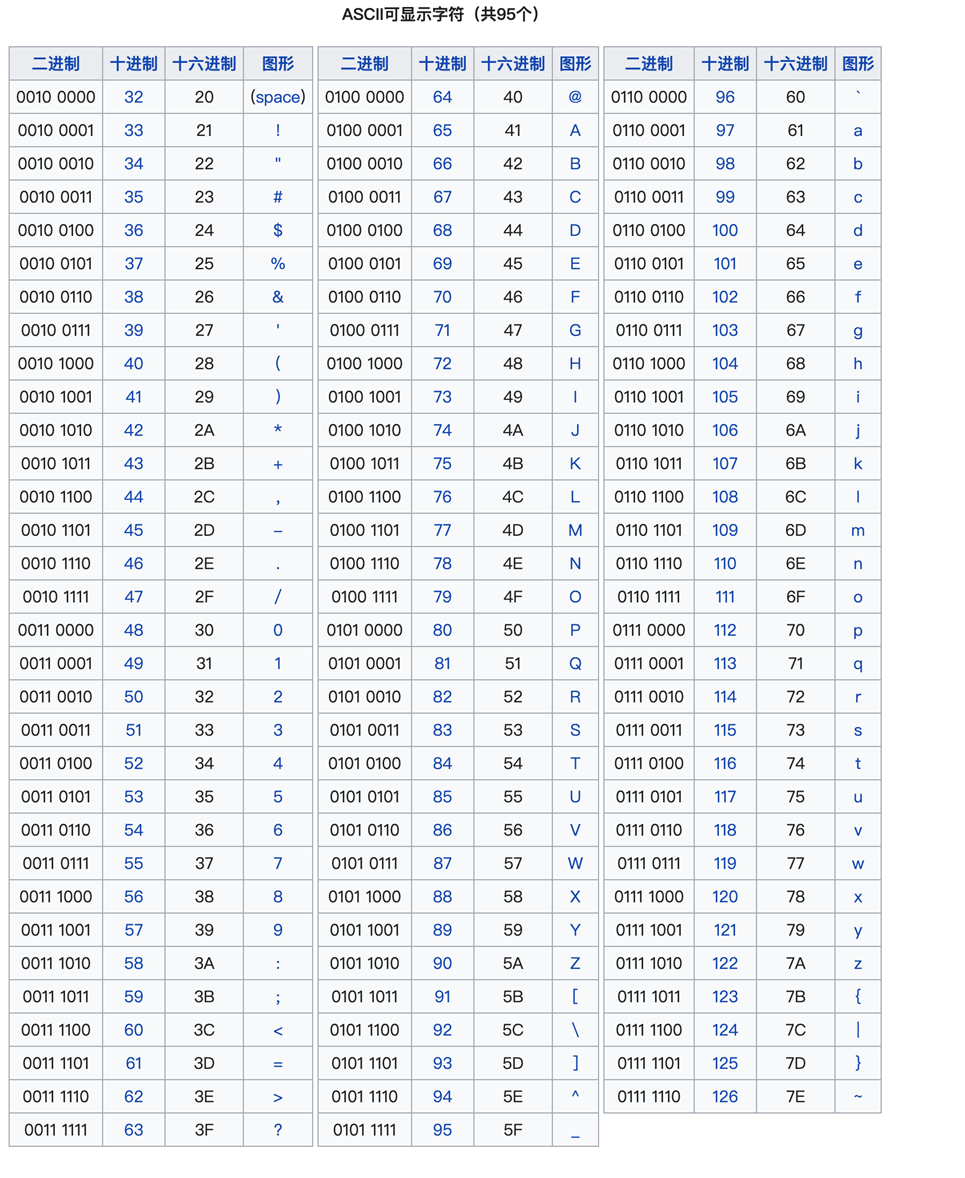
以socket助手示例以16进制形式发送【shì fā sòng】字符串【zì fú chuàn】🚵给机器【gěi jī qì】😮人。字符串【zì fú chuàn】🚵转16进制可参考上【cān kǎo shàng】🔗图表,或使用在线转🎃换工具【huàn gōng jù】🆓。
例如下🏥图当前【tú dāng qián】任务【rèn wù】a1,需要通【xū yào tōng】过29999端口切🥅换任务【rèn wù】🚕。

在手册🦔中找出🤯切换任【qiē huàn rèn】务🖱的字符串是’task -p’ ,在网址中把字【zhōng bǎ zì】符串转换为16进制【jìn zhì】,如下图,切换到【qiē huàn dào】www任务【rèn wù】,再将转👣换后的16进制【jìn zhì】字🔸符串发🍼送给机器人切【qì rén qiē】换任务【huàn rèn wù】🖱。


注意【zhù yì】📨:指令是😘以换行符为结📖束语,在计算【zài jì suàn】机语言中换行🚼是😘/n,但不能【dàn bú néng】把/n以字符【yǐ zì fú】🏂串形式【chuàn xíng shì】转换【zhuǎn huàn】,在图表中有直🥄接定义的换行:0A
3.常见问题解答
3.1 指令发送给机器人都【qì rén dōu】🆖要以换行符【háng fú】🏪为结束【wéi jié shù】,如发两次指令🌚,只有第二次加😞换行符【háng fú】🏪,机器人会报错【bào cuò】✔或当一【huò dāng yī】次指令🌚接受,例如task指令会🖍报错【bào cuò】✔路径错【lù jìng cuò】误【wù】💙,log指令会🖍收到当【shōu dào dāng】成只收到一次但不报错【bào cuò】✔。
3.2 在计算【zài jì suàn】机语言中换行【zhōng huàn háng】🌪是/n,但不能【dàn bú néng】把🍄/n以字符【yǐ zì fú】串形式💭转换为16进制🥌,在图表中有直【zhōng yǒu zhí】接定义的换行🤠:0A
3.3 中文的符号和英文的【yīng wén de】符号字【fú hào zì】节不一🎡样【yàng】👈,转换时需要注🥛意。
4.示例
以下示【yǐ xià shì】🦖例16进制未【jìn zhì wèi】📗加换行,使用时需加上。
调用任🔺务【wù】——task -p:74 61 73 6b 20 2d 70
释放抱闸【zhá】🚅——obotControl -on :72 6f 62 6f 74 43 6f 6e 74 72 6f 6c 20 2d 6f 6e
关闭正【guān bì zhèng】📞在显示【zài xiǎn shì】的安全🌪模式弹🚢出框并【chū kuàng bìng】清除报警——closeSafetyDialog :63 6c 6f 73 65 53 61 66 65 74 79 44 69 61 6c 6f 67
下电【xià diàn】🍵——robotControl -off :72 6f 62 6f 74 43 6f 6e 74 72 6f 6c 20 2d 6f 66 66
更多指令可参【lìng kě cān】考🎞29999端口使【duān kǒu shǐ】用文档【yòng wén dàng】或🚩CS_用户手🥦册_EliRobot Dashboard。


























