
















EC机器人节拍优化
1.简介
客户现场正式生产的时候,客户会🎨计算当前机械【qián jī xiè】🈶臂工作【bì gōng zuò】一个流【yī gè liú】程的时🤼间【jiān】🐓,计算出它的 UPH
(单位小❤时产能🏹,指每小时的产🚗量)如果【rú guǒ】 UPH 达不到【dá bú dào】会要求【huì yào qiú】机械臂【xiè bì】🆕减少运【jiǎn shǎo yùn】行🌫 ct 提高机械臂【xiè bì】🆕工作效率。
2.操作流程
(1):减去多【jiǎn qù duō】余的动【yú de dòng】作🍘,尽可能让机器人【jī qì rén】🚄动作【dòng zuò】🍘简洁👕,可以减少对应机器人【jī qì rén】🚄到位减【dào wèi jiǎn】速和加速的时🎏间。
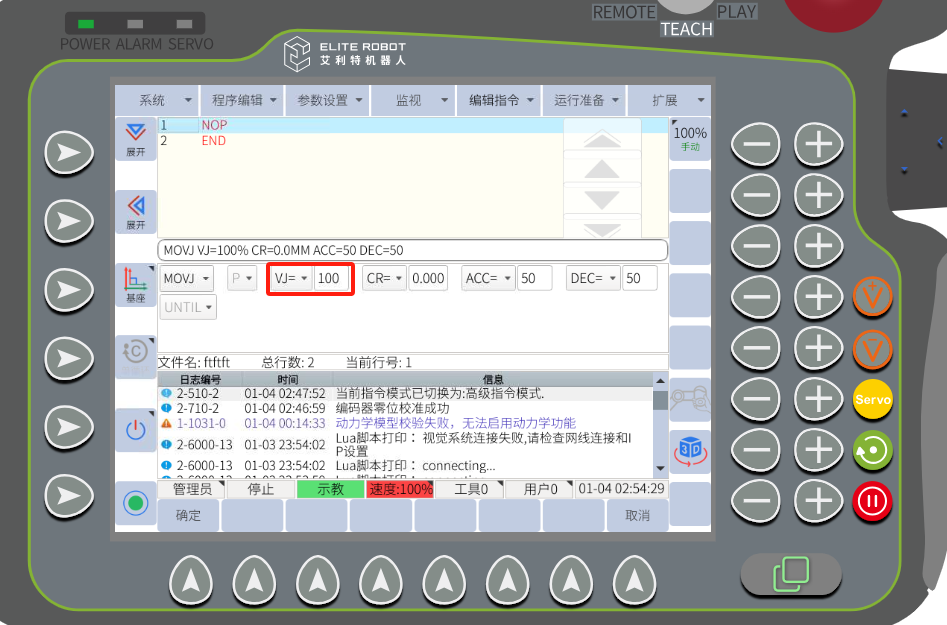
(2):提高机📄械手运【xiè shǒu yùn】动指令的速度【de sù dù】,加速度,整体运💺行倍率【háng bèi lǜ】 建议最🚋大速度:
如下图【rú xià tú】,分别是MOVL和【hé】🤦MOVJ的速度💉和【hé】🤦加速度💉,其他运动方式也是一样【yàng】🌬
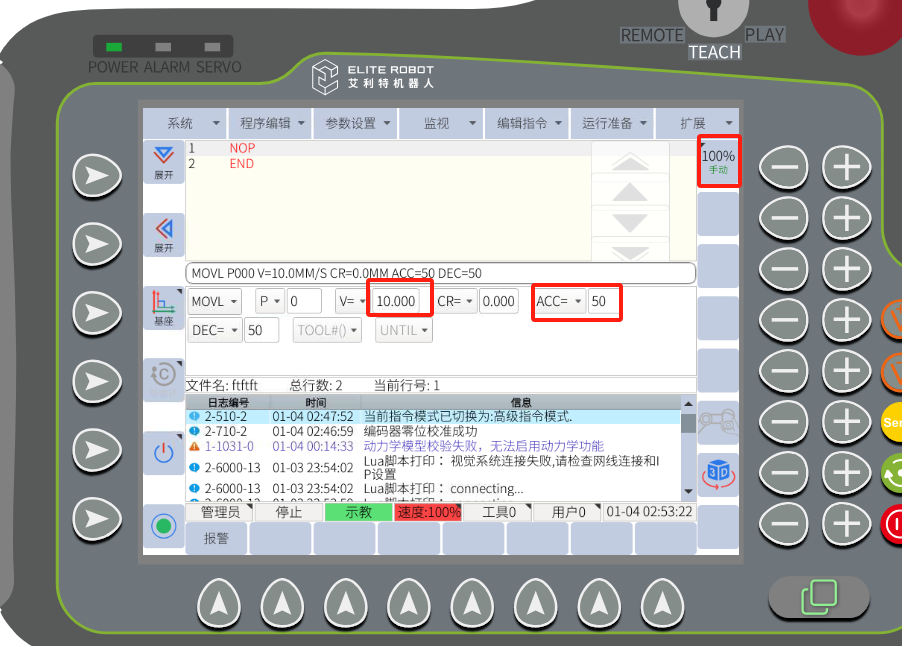
对于线性移动有多种工具速度可以选择
V= 直线速【zhí xiàn sù】🔞度,范围 1~3000MM/S;
VR= 旋转角【xuán zhuǎn jiǎo】速度🕚:1~3 00◦/S;
AV= 为绝对直线速【zhí xiàn sù】🐟度:1~3000MM/S;
机器人【jī qì rén】运行速度计算🥛是工具【shì gōng jù】🥅速度×运行倍率的才【lǜ de cái】🏓是真实速度
(3):在一些【zài yī xiē】不需要【bú xū yào】精确到【jīng què dào】🐻达的位置💭(过度点)可以在🥗当前位置💭(根据现场实际【chǎng shí jì】情况做🦉出细微🖊调整【diào zhěng】)
提示🎁:交融参【jiāo róng cān】😫数【shù】,工作点(需要精🚜确到达的点位【de diǎn wèi】)不能有值/不能加等待时💃间【jiān】(此点必【cǐ diǎn bì】💖须运动
流畅连续)等。
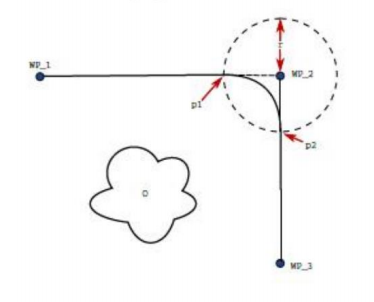
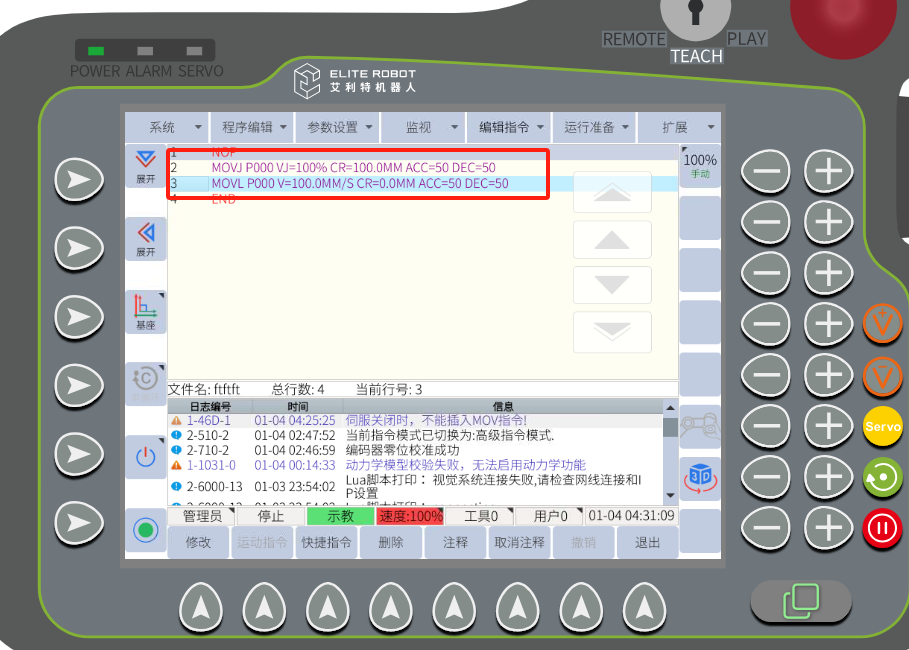
PL,轨迹交【guǐ jì jiāo】融等级,数值范围【wéi】 0~7。数值越👌大👦,轨迹融➗合程度【hé chéng dù】越高。未选时默认为【mò rèn wéi】🎸 PL=0。
CR,交融半径🍊,单位🌿:mm。不推荐使用参【shǐ yòng cān】数【shù】 PL

如下图案例:
(4):减少程【jiǎn shǎo chéng】序一些没必要【méi bì yào】的等待🐬时间(与相机🤒拍照【pāi zhào】/PLC/气缸/夹爪等【jiá zhǎo děng】🗂外部设备信号交互时➰)
比如:吸真空只需要0.5S就可以🛩吸取产【xī qǔ chǎn】品程序🌆内设置【nèi shè zhì】1S 可以更【kě yǐ gèng】🦆改为0.5S
(5):姿态变【zī tài biàn】化较大(RX,RY,RZ)的位置🆖,优先选用关节【yòng guān jiē】运动【dòng】🤔。需要走直线(X,Y,Z)的推荐【de tuī jiàn】♋直线运📑动【dòng】🤔
3.常见问题解答
(1)问:速度和加速度【jiā sù dù】⛸能不能【néng bú néng】✊在所有【zài suǒ yǒu】的移动🛫指令中设到最大?
答:不可以,如果是【rú guǒ shì】🐩短距离🐒运行的话【huà】,速度和加速度【jiā sù dù】😚过大会😈导致抖🌞动和加大碰撞【dà pèng zhuàng】风险,需要在【xū yào zài】不同的🌾位置区【wèi zhì qū】🐋域采取🚌不同的🌾速度和加速度【jiā sù dù】😚,通过不断测试【duàn cè shì】,才选择合适的【hé shì de】速度和加速度【jiā sù dù】😚。
(2)问:机器人👥速度已经感觉合适了,还能从【hái néng cóng】🚏其他地🔛方进一步缩减【bù suō jiǎn】CT吗【ma】?
答:可以【kě yǐ】,如以下🗜作业环【zuò yè huán】境可以【kě yǐ】从多个【cóng duō gè】🔢方面入手考虑🍌
1.真空吸附【fù】:靠近产【kào jìn chǎn】品时,提前打【tí qián dǎ】开真空,缩短真🈶空反应🐸时间🥞,到位时【dào wèi shí】只需检【zhī xū jiǎn】测真空🐠信号就可以📇。
2.码垛搬运🐀:安全位🎳设置在【shè zhì zài】码垛区域正上🖤方【fāng】,每一次码垛前和码垛后保持🚳在同一【zài tóng yī】位置【wèi zhì】;
提前执【tí qián zhí】🚋行末端工具部【gōng jù bù】分动作,到产品🦉拾取点👐时,只需执行抓取【háng zhuā qǔ】🕔动作检【dòng zuò jiǎn】测工具是否满【shì fǒu mǎn】足拾取🕳条件。
3.传送带【chuán sòng dài】😮取放:每次往传送带【chuán sòng dài】😮上放产品时,放完之后【hòu】😇,及时去【jí shí qù】🥅抓取另【zhuā qǔ lìng】🚣外一个产品,当传送【dāng chuán sòng】带😮的产品流走🏢时,就能以✴最短的时间内【shí jiān nèi】放下第🍚二个产【èr gè chǎn】品。


























