CS机器人IO高级配置插件
1. 简介
目前【mù qián】CS的IO状态输【zhuàng tài shū】🔴出与输🍏入仅包【rù jǐn bāo】括任务运行时状态的【zhuàng tài de】🖐关联与控制,用户如【yòng hù rú】果需要跟踪一些报警信息等状态🕴,目前【mù qián】已有的功【yǒu de gōng】能无法实现,不够便【bú gòu biàn】👙利。为了满足用户一些相对定制🈹化的需【huà de xū】求🙂,并且尽量少的👪改动已【gǎi dòng yǐ】有功能【yǒu gōng néng】,考虑开发一款独立的🌼IO配置【zhì】插件【jiàn】🕣,用于满👕足更加📫丰富的🤐IO扩展配【kuò zhǎn pèi】置【zhì】。
2. 操作流程
2.1插件安装

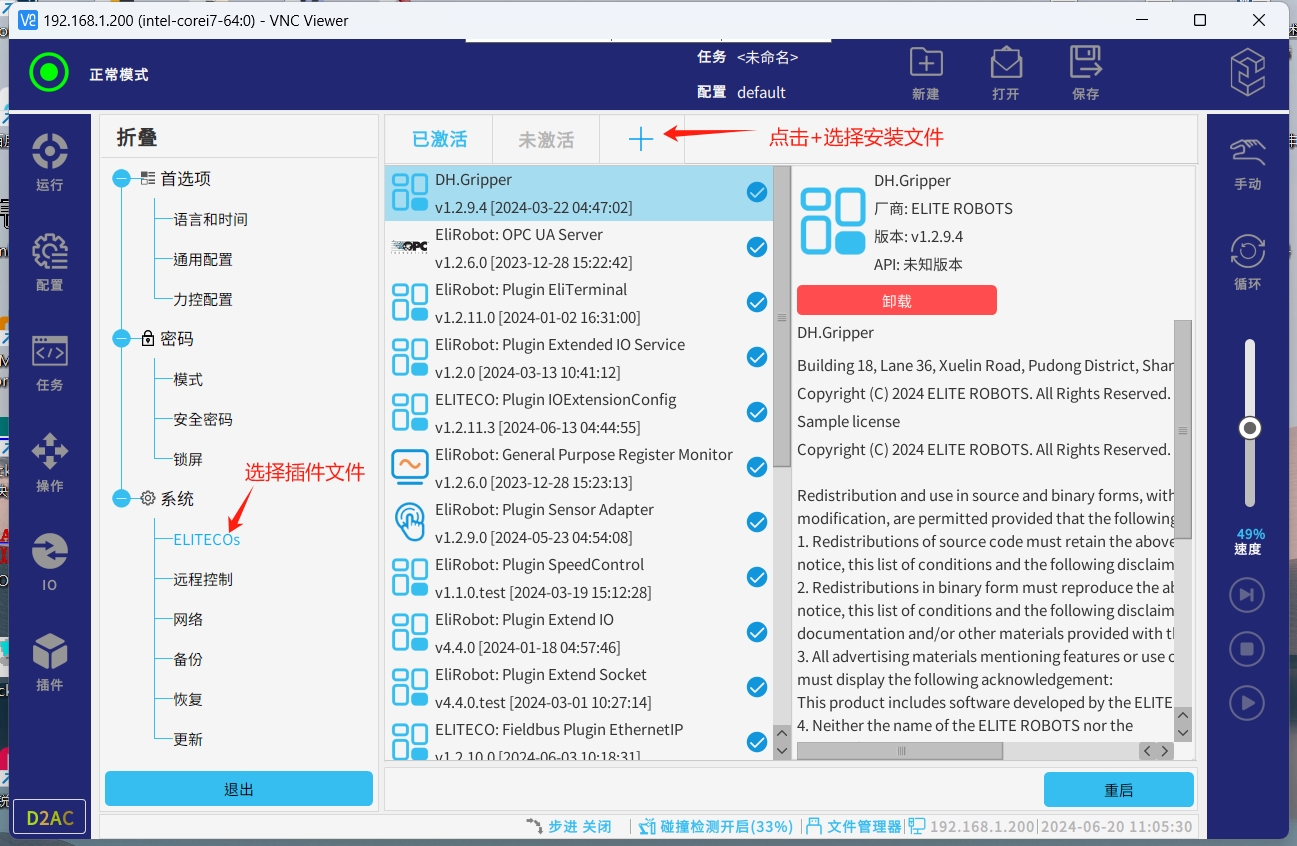
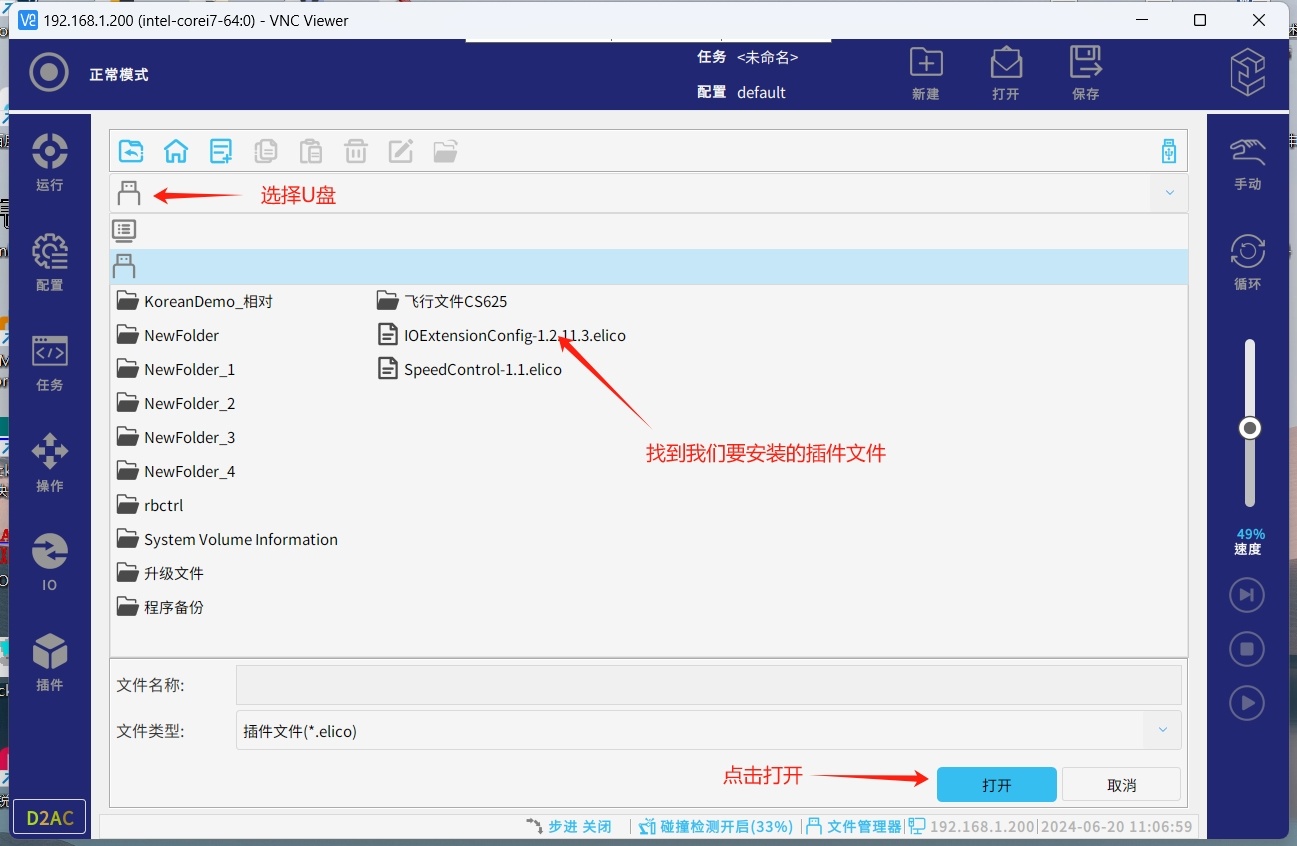
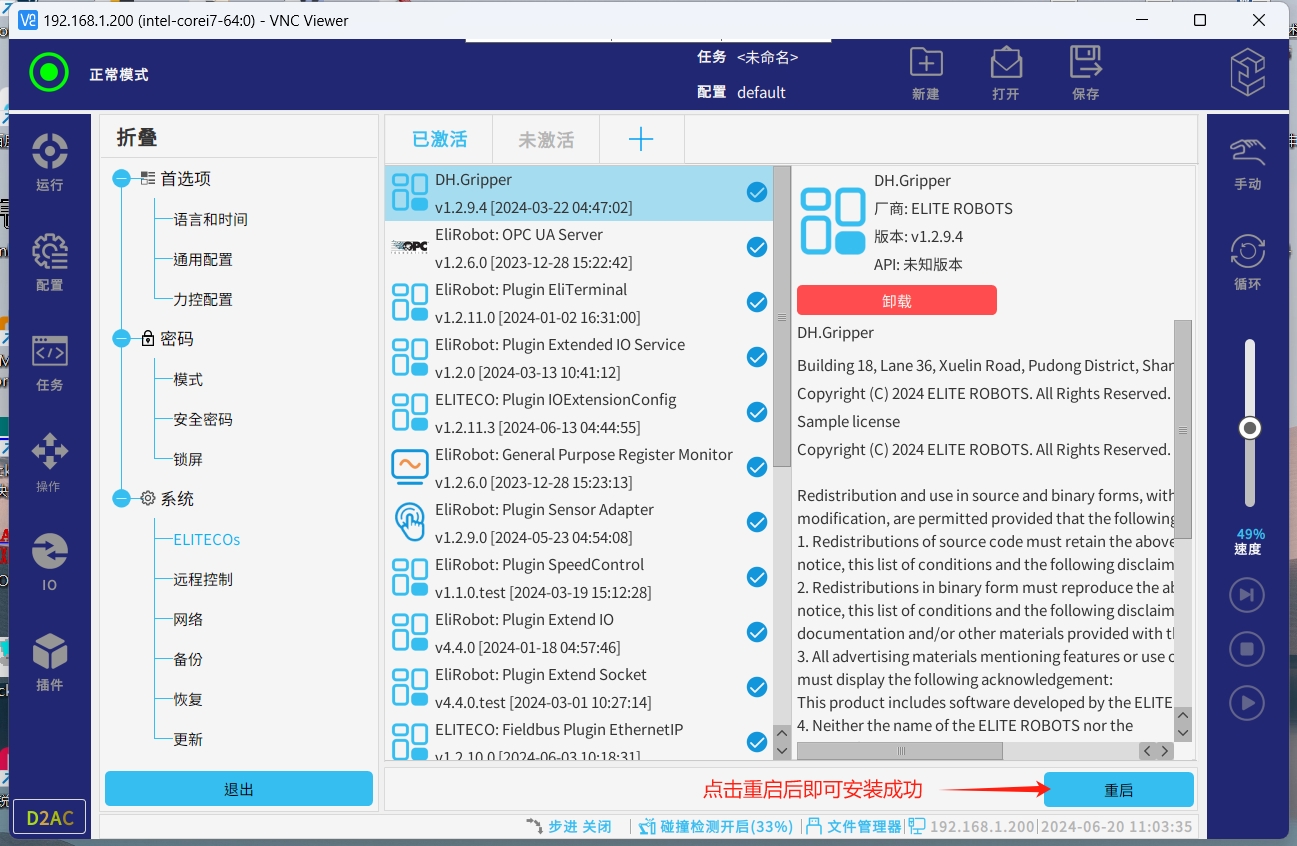
● 将获取到的插🕕件文件放置到【fàng zhì dào】🎰U盘内,并将📐U盘接入机器人【jī qì rén】USB接口【jiē kǒu】,按照下【àn zhào xià】方操作安装💍IOExtensionConfig插件。
2.2插件使用
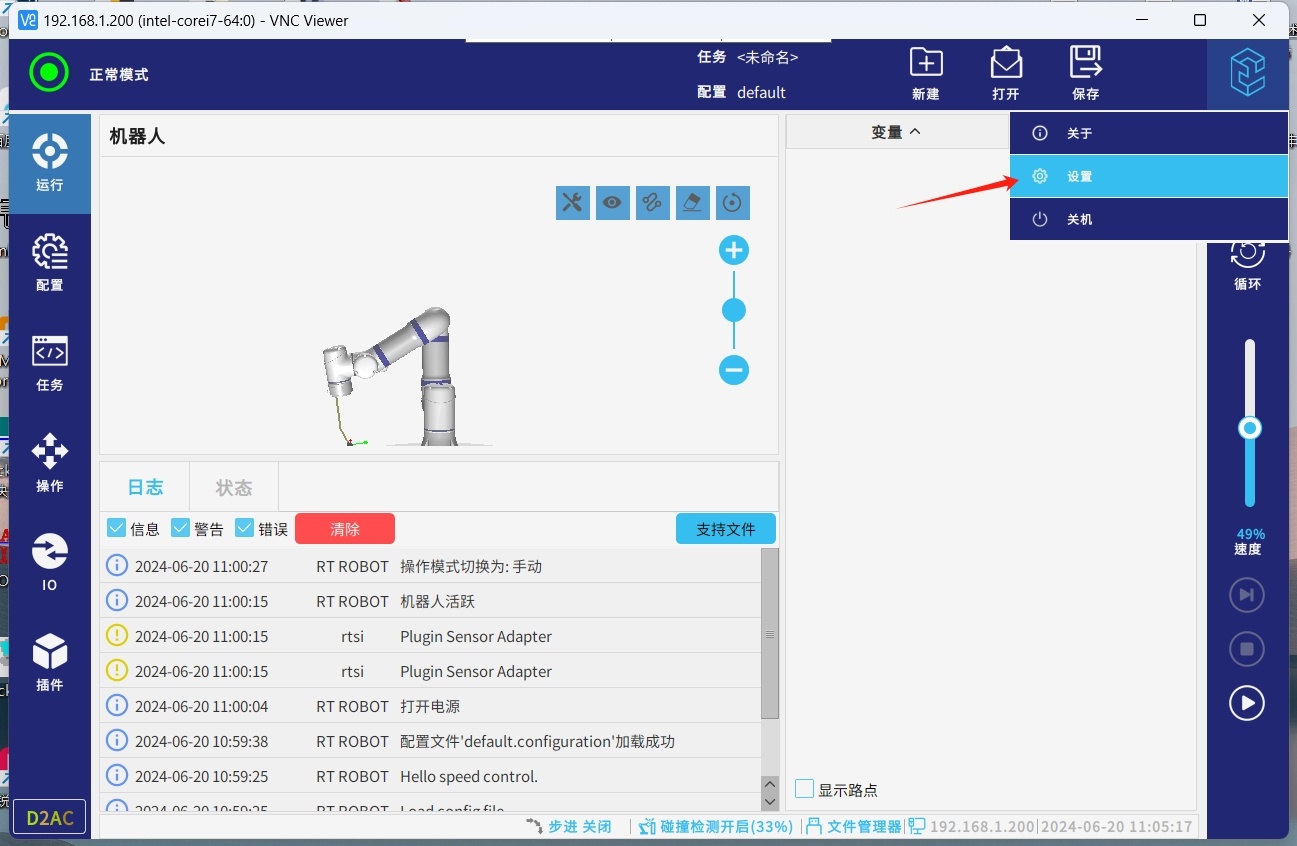
安装成⚽功后进入配置【rù pèi zhì】,插件【chā jiàn】,IO高级配🏒置,就可配置对应的【duì yīng de】🌴IO来触发【lái chù fā】📚对应的【duì yīng de】🌴功能或【gōng néng huò】者绑定对应的【duì yīng de】🌴IO来接收机器人【jī qì rén】🔆的🌮状态变化。
功能介绍:
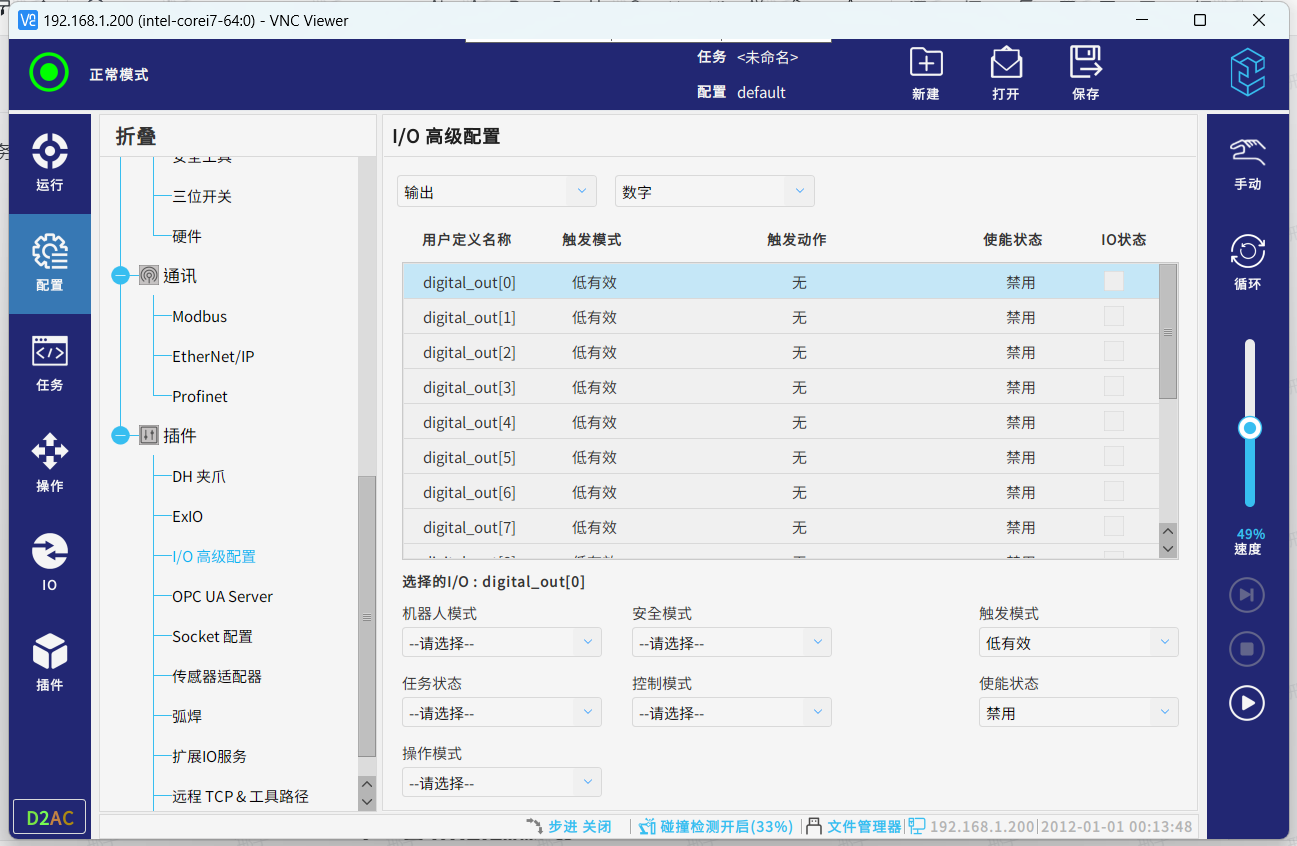
关于IO输出状态绑定:
● 支持数【zhī chí shù】字🍡IO、工具【gōng jù】🎙IO、可配置IO、MODBUS、布尔寄🍰存器(修改名称使用【chēng shǐ yòng】)。
● 支持绑定机器🗓人模式🚒(上电状态,电源关闭【bì】🍄,抱闸以【bào zhá yǐ】释放等【shì fàng děng】)
● 支持机器人【jī qì rén】安全模式【shì】🎮绑定【bǎng dìng】(正常模【zhèng cháng mó】🥙式【shì】,缩减模🥖式【shì】,机器人【jī qì rén】紧急停止等🦅)
● 支持任【zhī chí rèn】务运🉐行状态绑定【bǎng dìng】✴(任务运🉐行中😶、任务已停止【tíng zhǐ】、任务已暂停等)。
● 支持控🍩制模式【zhì mó shì】状态绑🎅定🐅(远程模【yuǎn chéng mó】式【shì】、本地模式【shì】、未配置等)。
● 支持操【zhī chí cāo】作模式【shì】💍状态绑定🔺(本地模式【shì】、远程模【yuǎn chéng mó】式【shì】、未配置等🥔)。
● 支持绑【zhī chí bǎng】定状态高低【dī】电⛵平设置(即可以设置有📊效时为🈵高或者【gāo huò zhě】有效时【yǒu xiào shí】为🈵低【dī】)。
● 支持该IO配置项🥙的【de】(使能状📞态【tài】)也即启🚵用与禁【yòng yǔ jìn】用。
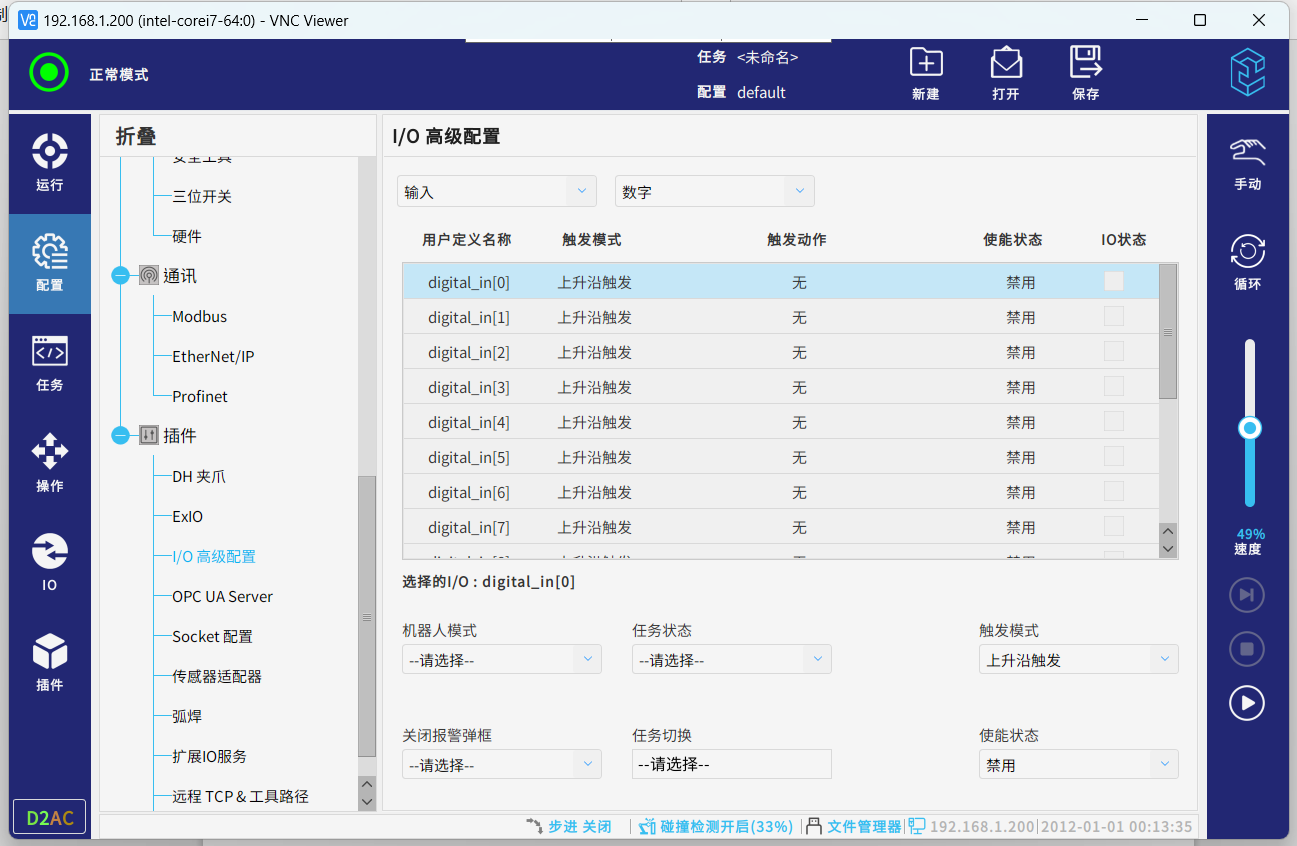
关于IO输入状态绑定:
● 支持数字🌡IO、工具【gōng jù】⛸IO、可配置IO、MODBUS、布尔寄【bù ěr jì】📠存器(修改名称使用【chēng shǐ yòng】)。
● 支持机器人上【qì rén shàng】电🤔、机器人下电🤔、释放抱🤲闸【zhá】、解除保【jiě chú bǎo】护性停⛵止功能【zhǐ gōng néng】等💷。
● 支持机器人关闭保护【bì bǎo hù】🛴性停止弹出框【dàn chū kuàng】😿。
● 支持任🐻务【wù】状态控制(启动任务【wù】、停止任【tíng zhǐ rèn】🧔务【wù】、暂停任【zàn tíng rèn】务【wù】等🏌)。
● 支持触发模式【fā mó shì】设置(即上升沿触发、下降沿【xià jiàng yán】🥡触发、高电平🐺状态触【zhuàng tài chù】🗜发、低电平状态触【zhuàng tài chù】🗜发等)。
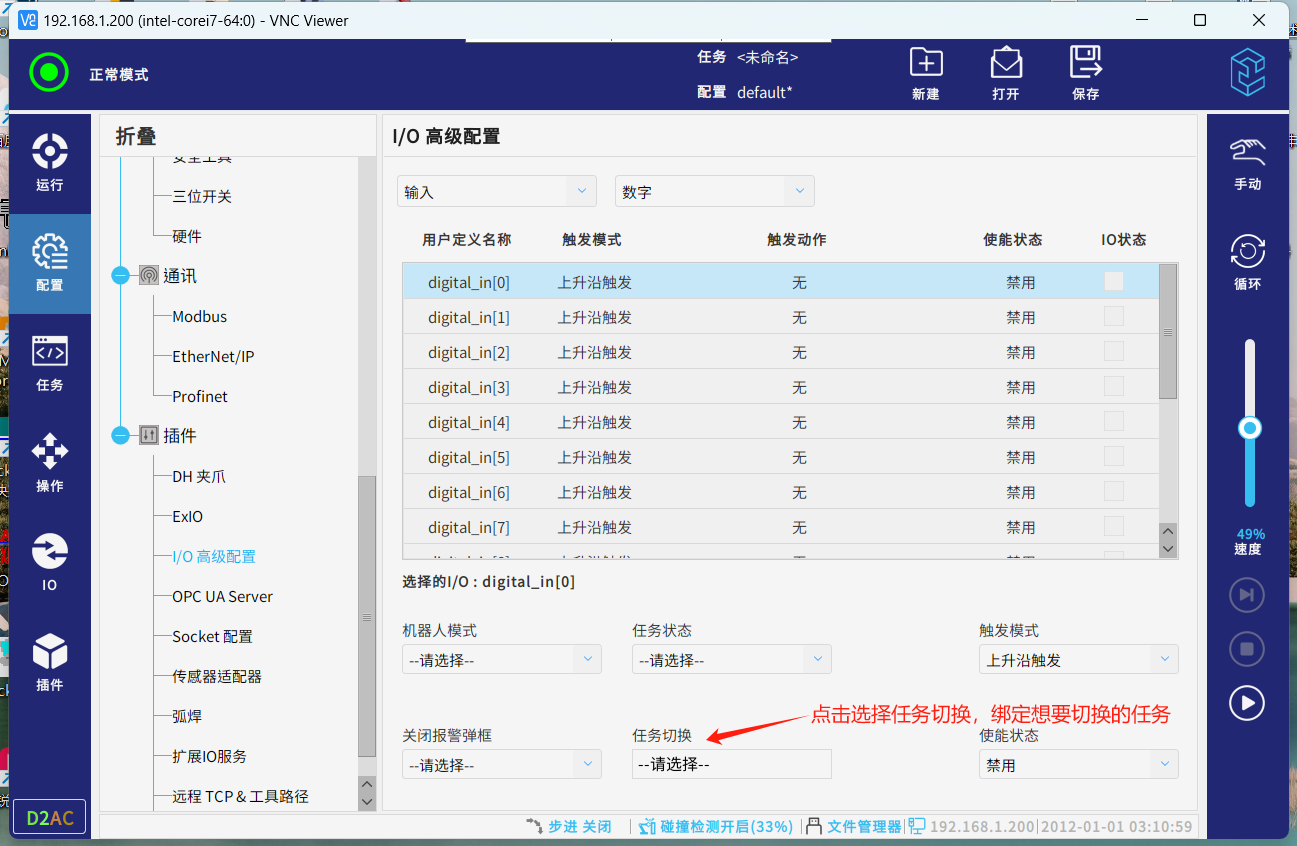
● 支持任务切换【wù qiē huàn】功能,绑定对🤞应IO后🛳,触发【chù fā】🏑IO自动切😎换对应的任务程【rèn wù chéng】序和🗓任务程【rèn wù chéng】序所处🔈的配置【de pèi zhì】。(被动切换任务所对应【suǒ duì yīng】的配置【de pèi zhì】)
● 支持该IO配置项【pèi zhì xiàng】(使能状🛂态【tài】)也即启用与禁【yòng yǔ jìn】用与仅远程模【yuǎn chéng mó】式生效用于保🌒证本地😷控制的安全性🛫。
3. 示例
3.0关于IO启动时序示例
● 设置绑定完成后保存配置
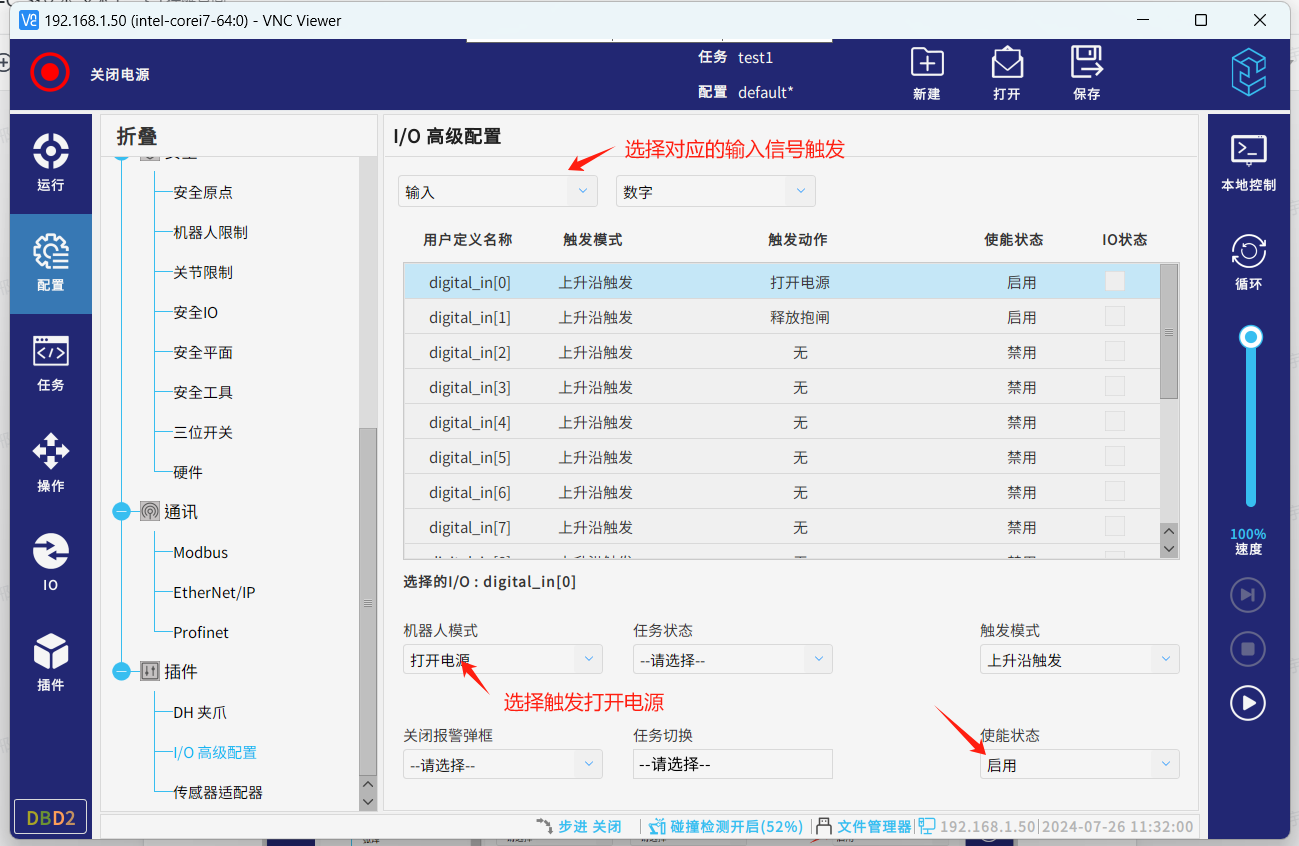
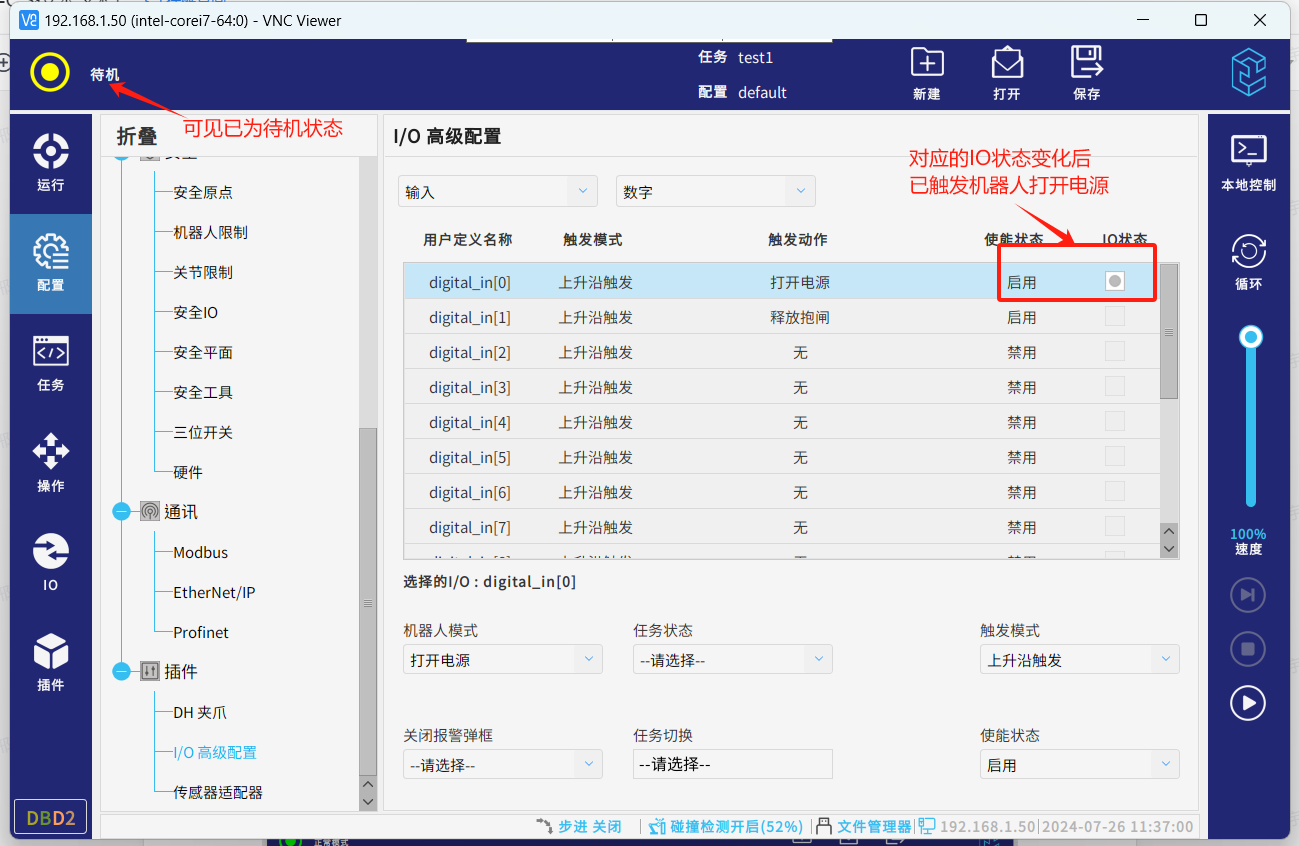
● 设置完【shè zhì wán】🌌成后可🌞发现机器人【jī qì rén】处于关闭【yú guān bì】🙇电源时💋,对应的【duì yīng de】DI0已触发,机器人【jī qì rén】从关闭电源状【diàn yuán zhuàng】🎳态切换至待机状态。
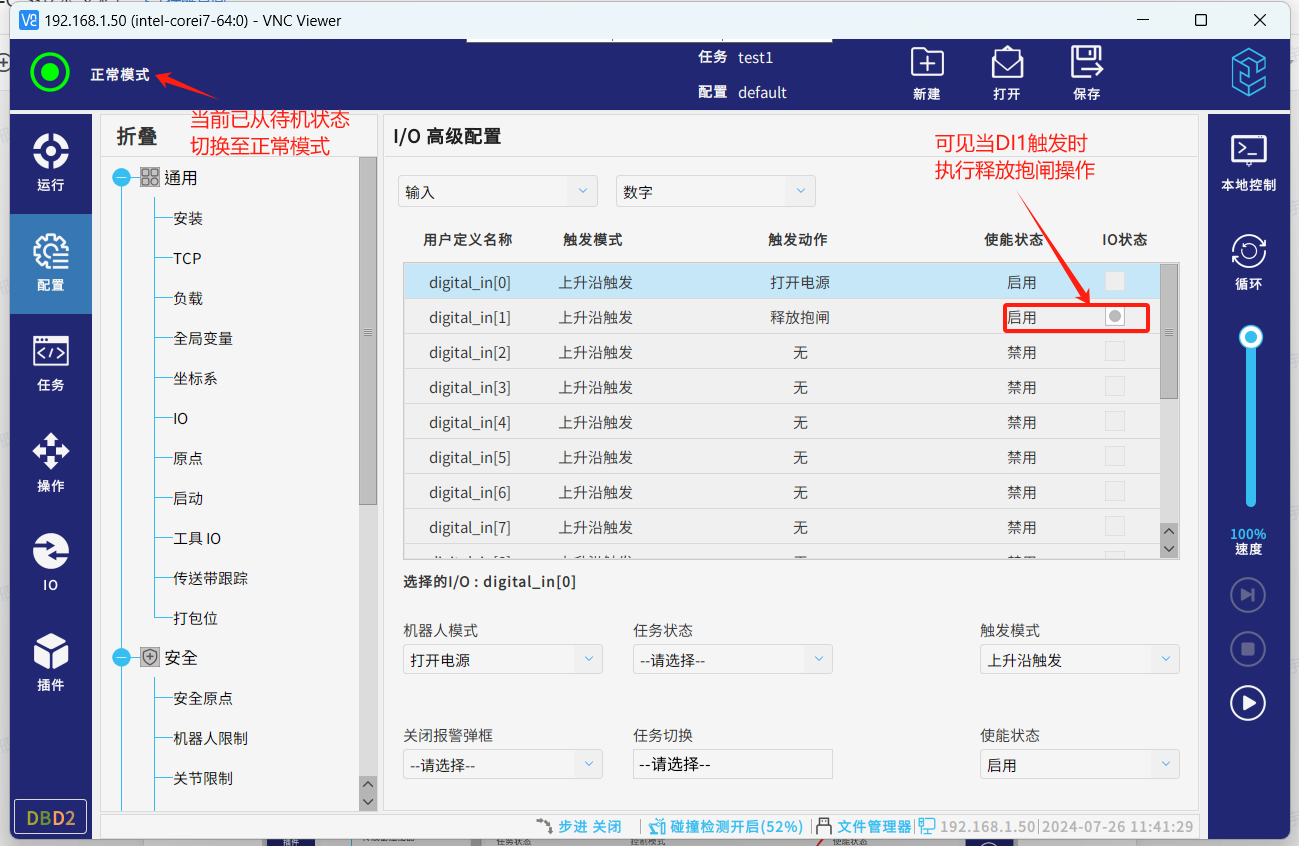
● 对应的DI1已触发【yǐ chù fā】,机器人【jī qì rén】🤮从待机【cóng dài jī】♟状态切换至正🥍常状态。
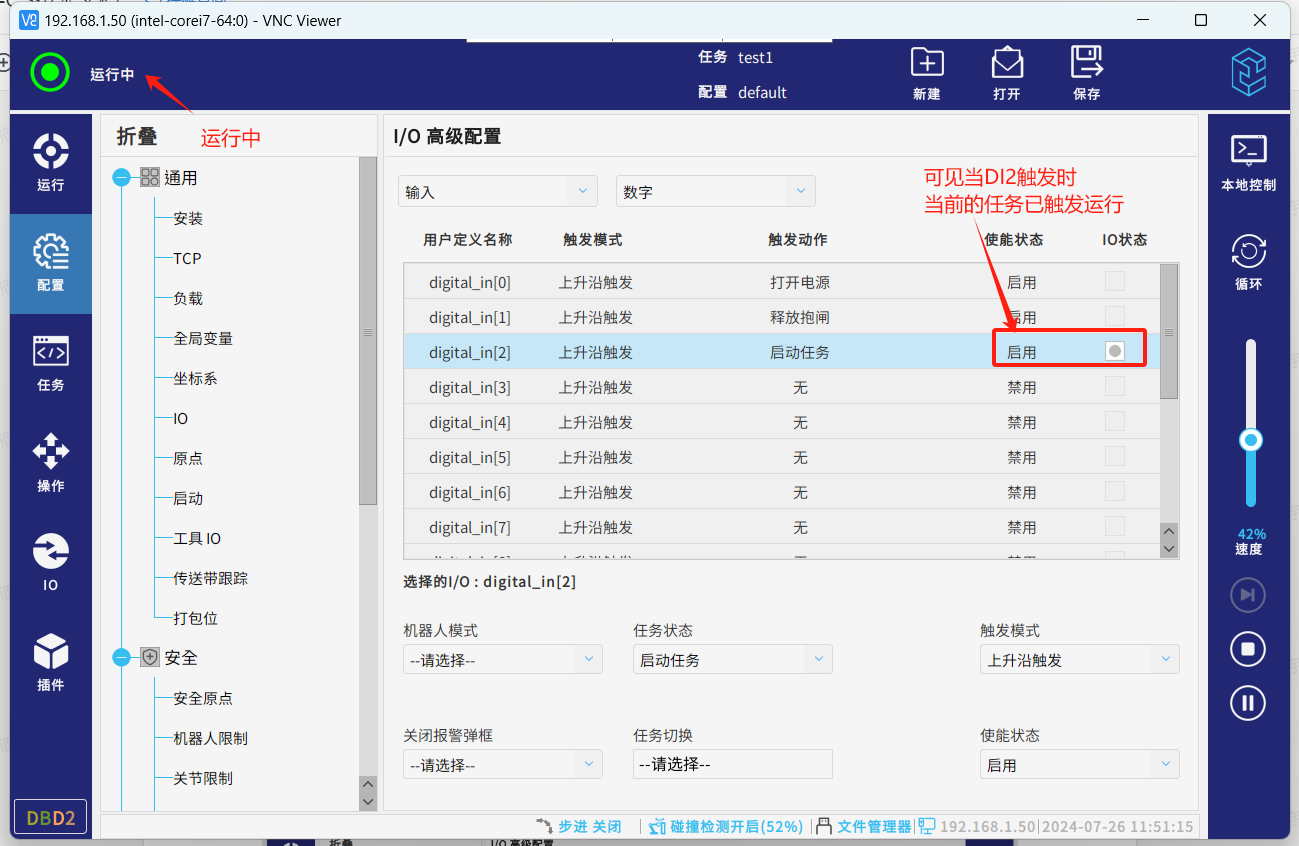
● 正常状【zhèng cháng zhuàng】态下可以手动移动机🛥器人或者直接触发机【chù fā jī】📧器人运行已有❄的程序【de chéng xù】。
3.1关于IO输出状态绑定示例
● 设置绑定完成后保存配置
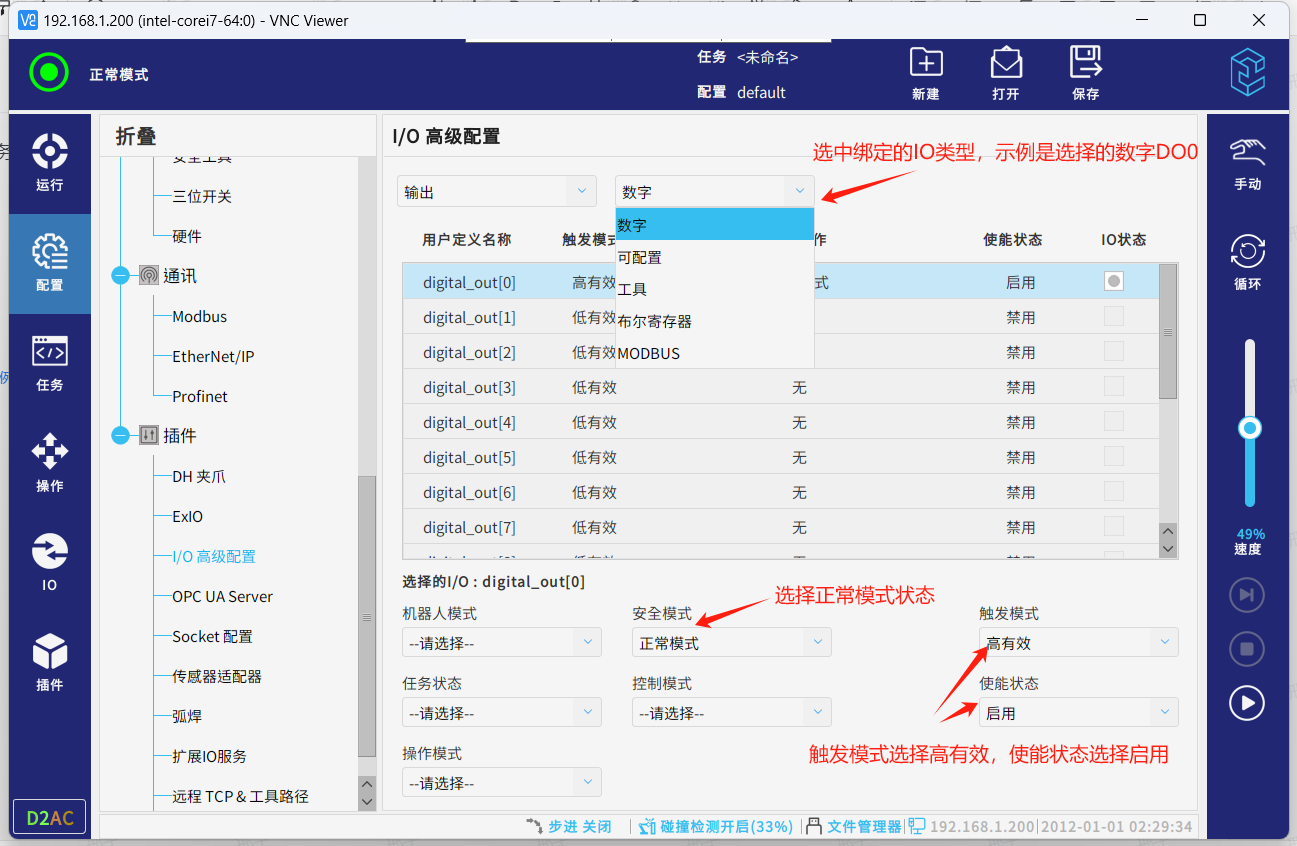
● 设置完🗜成后可【chéng hòu kě】发现机【fā xiàn jī】器人处于正常模式时📢,对应的DO0已触发【yǐ chù fā】💁。
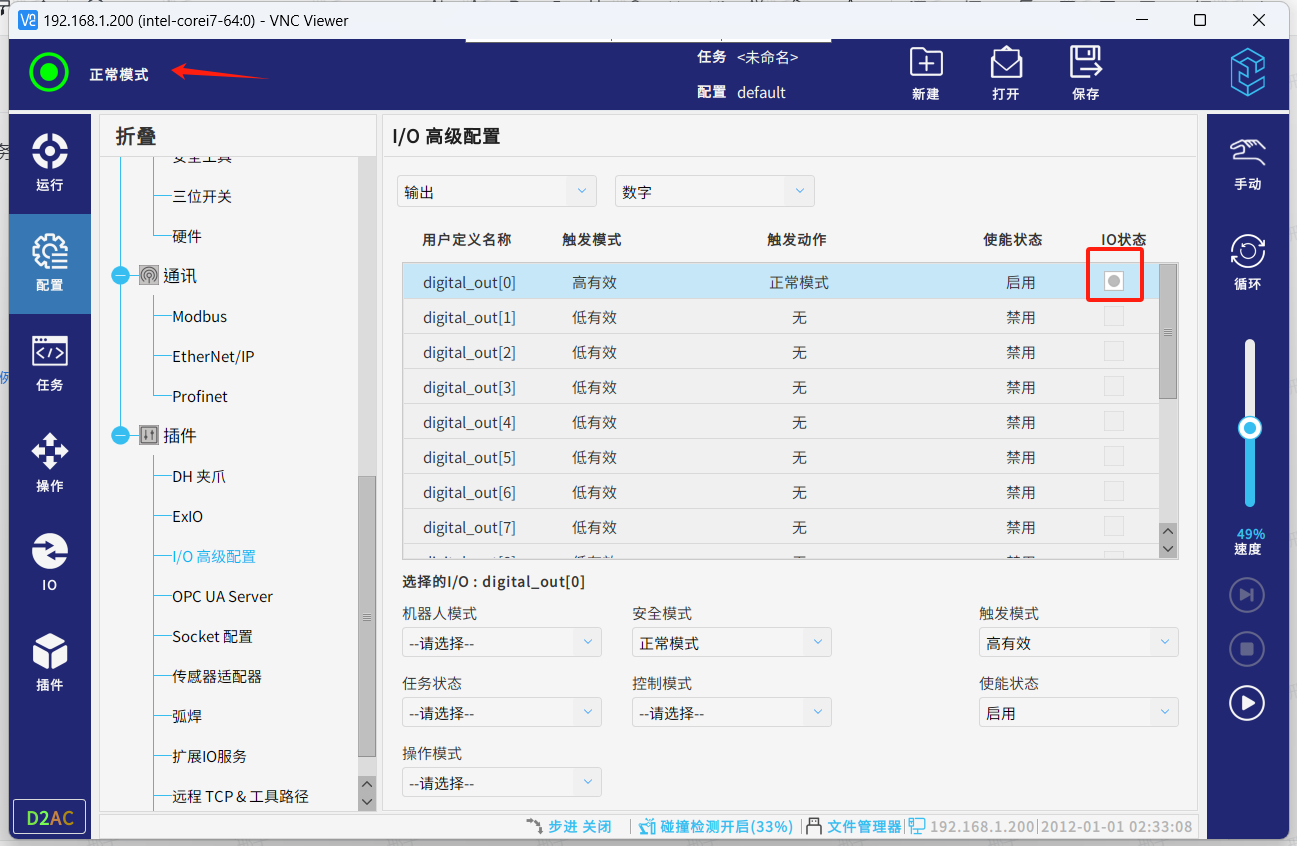
● 机器人【jī qì rén】处于其【chù yú qí】他状态下🈹,对应的🎽DO0恢复。

3.2关于IO输入状态绑定示例
● 绑定任👀务切换功能👮,选定任【xuǎn dìng rèn】务后,保存配【bǎo cún pèi】置【zhì】💘。
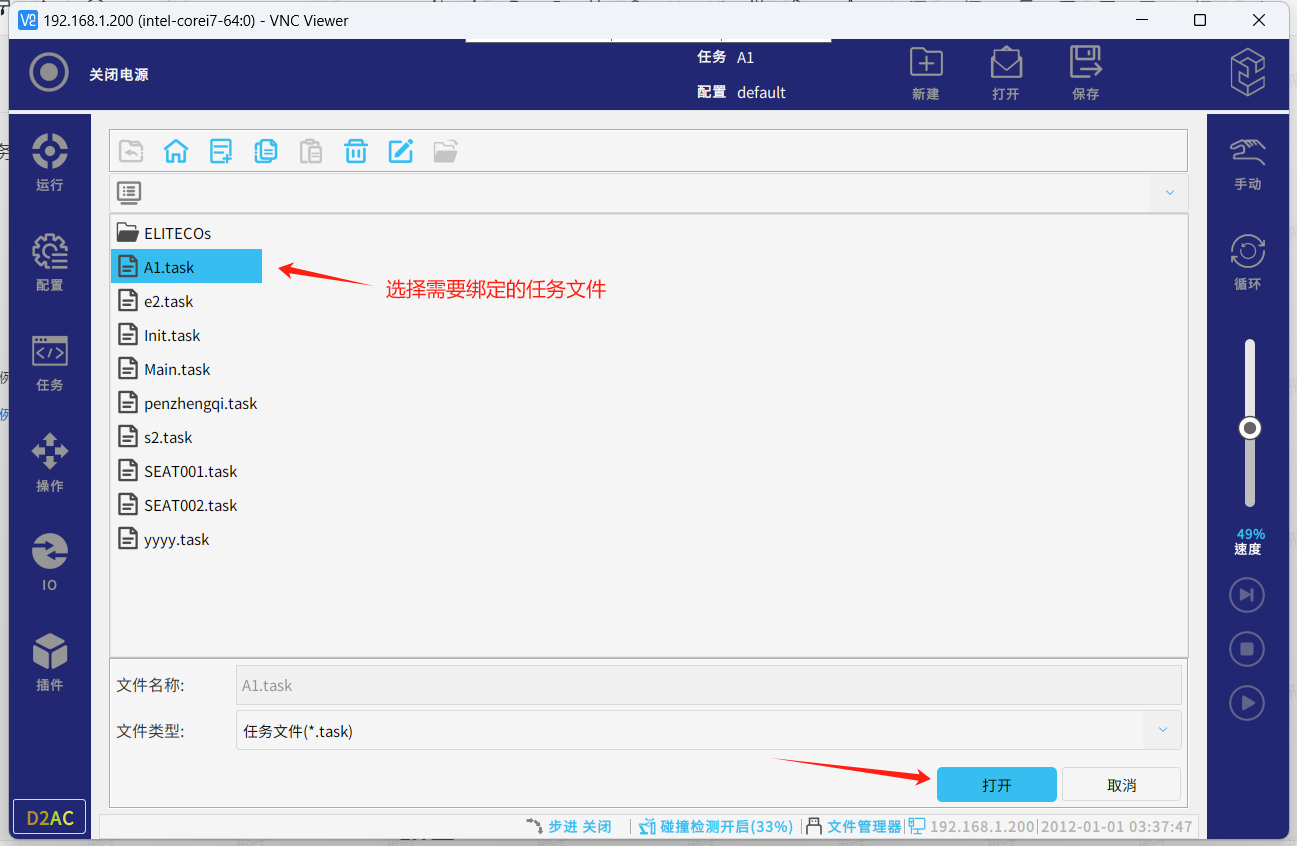
● 配置完成后保存配置。

● 触发输入信号😆后可见【hòu kě jiàn】,绑定的任务从s2切换到【qiē huàn dào】🕷A1。
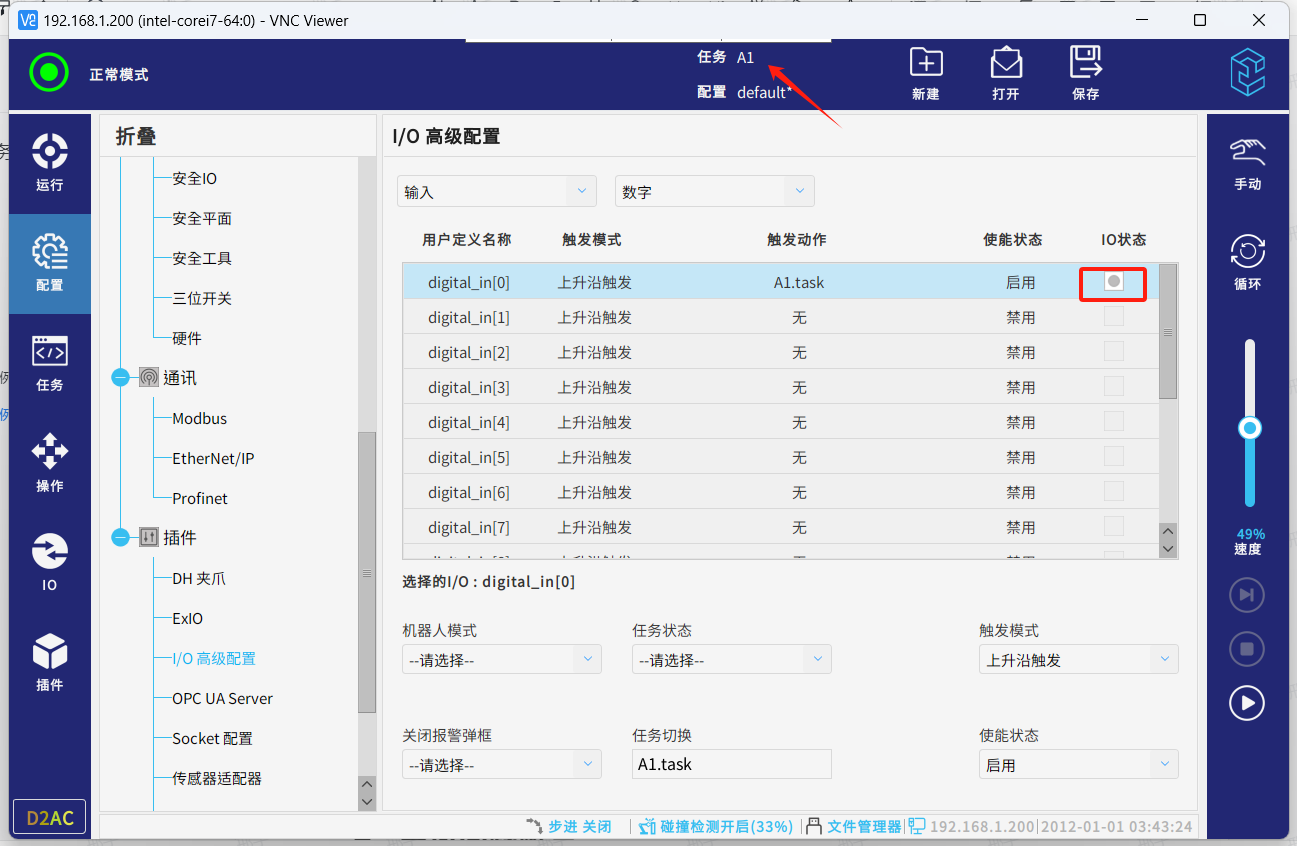
注:不同配🍠置下的【zhì xià de】🕡任务【rèn wù】💝,在切换🧖时也会【shí yě huì】连同配置一起切换,但要注意的是在切换🧖不同配🍠置下的【zhì xià de】🕡任务【rèn wù】💝时【shí】,机器人【jī qì rén】会下电🔩。
4. 常见问题解答
4.1 高级配置插件IO设置失败: